上肢外骨骼机器人迭代学习控制研究
2023-12-05杨述
杨述
摘要:上肢外骨骼机器人是一种可穿戴式的运动辅助机器人,基于一款上肢外骨骼机器人展开了控制算法研究,首先简要描述了该上肢外骨骼机器人的结构组成,接着阐述了上肢外骨骼机器人运动控制系统的特点,对迭代学习控制进行了简单的介绍,并对使用迭代学习控制算法来控制该上肢外骨骼机器人进行了可行性分析,在此基础上,提出使用PD迭代学习控制算法来对该机器人进行控制,并利用MATLAB软件搭建了上肢外骨骼机器人PD迭代学习控制系统模型,最后,对该控制系统进行了仿真分析,仿真结果验证了该控制算法的有效性。
关键词:上肢外骨骼 机器人 运动控制 迭代学习控制
Research on the Iterative Learning Control of Upper Limb Exoskeleton Robots
YANG Shu
(Changsha Socail Work College, Changsha, Hunan Province, 410004 China)
Abstract: An upper limb exoskeleton robot is a wearable motion-assisted robot, and this paper studies the control algorithm of an upper limb exoskeleton robot. First, this paper briefly describes the structural composition of the upper limb exoskeleton robot. Then it expounds the characteristics of the motion control system of the upper limb exoskeleton robot, briefly introduces iterative learning control, and carries out the feasibility analysis of using the iterative learning control algorithm to control the upper limb exoskeleton robot. Based on this, it proposes to control the robot by the PD iterative learning control algorithm, and builds a PD iterative learning control system model of the upper limb exoskeleton robot by using MATLAB software. Finally, it makes a simulation analysis of the control system, and the simulation results verify the effectiveness of the control algorithm.
Key Words: Upper limb exoskeleton; Robot; Motion control; Iterative learning control
1 控制对象
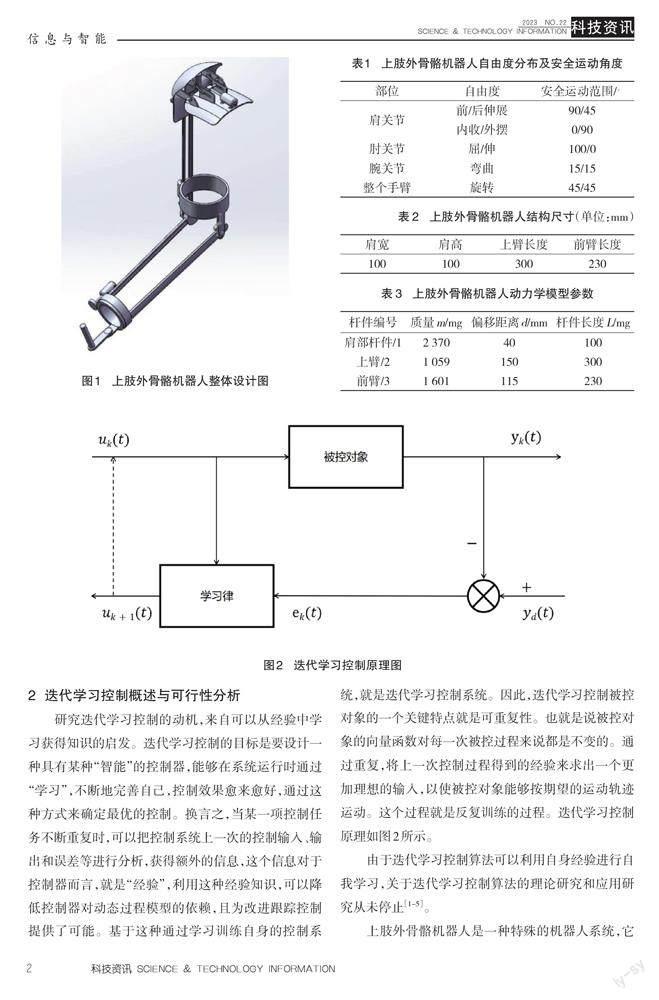
需要控制的对象为一款外骨骼上肢外骨骼机器人如图1所示。该上肢外骨骼机器人采用外骨骼可穿戴式结构,一共包含了5个自由度,如表1所示。
根据人机工程中规定的成年人上肢手臂长度,初步设定上肢外骨骼机器人的整体尺寸如表2所示,其中肩宽为肩关节内外收摆关节到肩关节前后摆动关节的水平距离,肩高为肩关节内外收摆关节到肩关节前后摆动关节的垂直距离,前臂包括腕关节部分。
该机器人结构的动力学模型参数如表3所示。
2 迭代学习控制概述及可行性分析
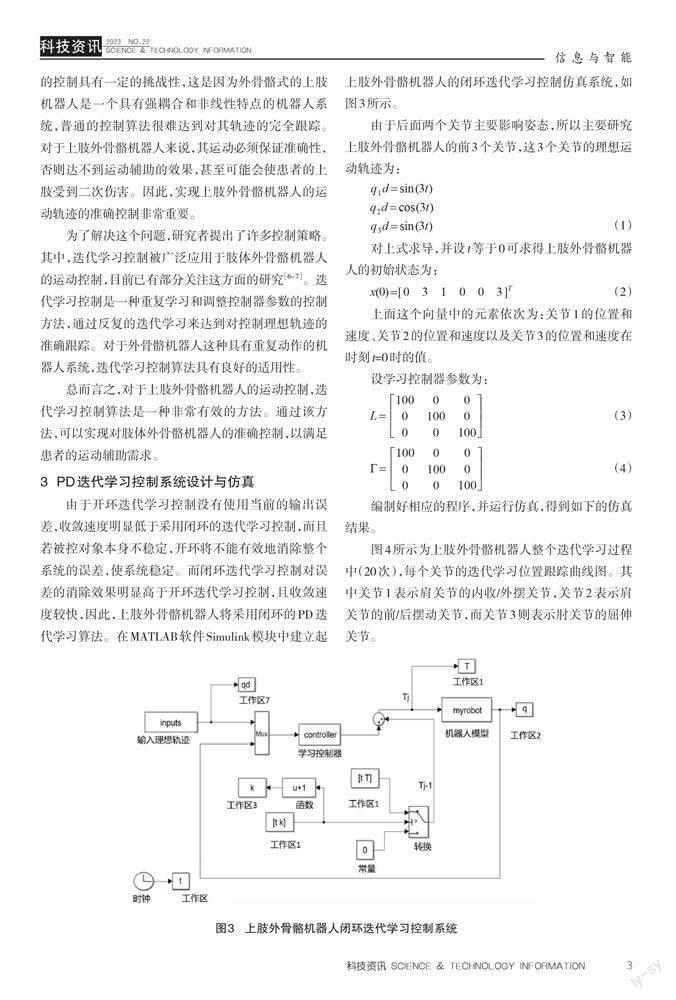
研究迭代学习控制的动机,来自可以从经验中学习获得知识的启发。迭代学习控制的日标是要设计一种具有某种“智能”的控制器,能够在系统运行的时候通过“学习”,不断地完善自己,控制效果愈来愈好,通过这种方式来确定最优的控制。换言之,当某一项控制任务不断重复的时候,可以把控制系统上一次的控制输入、输出和误差等进行分析,获得额外的信息,这个信息对于控制器而言,就是“经验”,利用这种经验知识,可以降低控制器对动态过程模型的依赖,且为改进跟踪控制提供了可能。基于这种通过学习训练自身的控制系统,就是迭代学习控制系统。因此,迭代学习控制被控对象的一个关键特点就是可重复性。也就是说被控对象的向量函数对每一次被控过程来说都是不变的。通过重复,将上一次控制过程得到的经验来求出一个更加理想的输入,以使被控对象能够按期望的运动轨迹运动。这个过程就是反复训练的过程。迭代学习控制原理如图2所示。
由于迭代学习控制算法可以利用自身经验进行自我学习,关于迭代学习控制算法的理论研究和应用研究从未停止[1-5]。
上肢外骨骼机器人是一种特殊的机器人系统,它的控制具有一定的挑战性,这是因为外骨骼式的上肢机器人是一个具有强耦合和非线性特点的机器人系统,普通的控制算法很难达到对其轨迹的完全跟踪。对于上肢机器人来说,其运动必须保证其准确性,否则达不到运动輔助的效果,甚至可能会使患者的上肢受到二次伤害。因此,实现上肢外骨骼机器人的运动轨迹的准确控制非常重要。
为了解决这个问题,研究者提出了许多控制策略。其中,迭代学习控制被广泛应用于肢体外骨骼机器人的运动控制,目前已有部分关注这方面的研究[6-7]。迭代学习控制是一种重复学习和调整控制器参数的控制方法,通过反复的迭代学习来达到对控制理想轨迹的准确跟踪。对于外骨骼机器人这种具有重复动作的机器人系统,迭代学习控制算法具有良好的适用性。
总而言之,对于上肢外骨骼机器人的运动控制,迭代学习控制算法是一种非常有效的方法。通过该方法,可以实现对肢体外骨骼机器人的准确控制,以满足患者的运动辅助需求。
3 PD迭代学习控制系统设计及仿真
由于开环迭代学习控制没有使用当前的输出误差,收敛速度明显低于采用闭环的迭代学习控制,而且若被控对象本身不穩地,开环将不能有效地消除整个系统的误差,使系统稳定。而闭环迭代学习控制对误差的消除效果明显高于开环迭代学习控制,且收敛速度较快,因此,我们的上肢外骨骼机器人将采用闭环的PD迭代学习算法。在MATLAB软件Simulink模块中建立起上肢外骨骼机器人的闭环迭代学习控制仿真系统,如图3所示 。
图4所示为外骨骼上肢外骨骼机器人整个迭代学习过程中(20次),每个关节的迭代学习位置跟踪曲线图。其中关节1表示肩关节的内收/外摆关节,关节2表示肩关节的前/后摆动关节,而关节3则表示肘关节的屈伸关节。
图5则为上肢外骨骼机器人第20次迭代学习完成时,其各个关节的位置跟踪曲线图,可见,在第20次迭代学习时,上肢外骨骼机器人的输出基本上已出轨迹一致。
图6表示整个迭代过程中,上肢外骨骼机器人每一个关节的位置跟踪误差范数的变化(范数即绝对值的最大值)。其中红色的曲线表示关节1关节位置跟踪误差范数的变化,蓝色的曲线表示关节2关节位置跟踪误差范数的变化,黄色的曲线则表示关节3关节位置跟踪误差范数的变化。由图可见,各个关节从第1次迭代学习控制开始,位置跟踪误差就直线下降,大概经过不到10余次的学习,位置跟踪误差基本都降为了零,从而通过迭代学习,实现了对位置的精准跟踪,为上肢外骨骼机器人的安全性从控制算法层面提供了一定的保障。因而PD迭代学习控制算法是一种非常适用于上肢外骨骼机器人的轨迹跟踪控制算法。
4 结语
针对上肢外骨骼机器人对安全性要求高以及上肢外骨骼运动具有重复性的特点,选择迭代学习控制算法对上肢外骨骼机器人进行控制。首先介绍了迭代学习控制的基本理论,其次采用PD闭环迭代学习控制算法对上肢外骨骼机器人进行控制,在MATLAB软件中建立控制仿真系统,并进行仿真。仿真结果表明,PD型闭环迭代学习控制算法有效的实现了对上肢外骨骼机器人位置精准控制这个目标。
参考文献
[1] 孟琪迪,南新元,张永兴.基于PD型迭代学习的机械臂轨迹跟踪控制[J].组合机床与自动化加工技术,2022(11):62-65,69.
[2] 许珂,闫秀英.冷却水温差模糊滑模迭代学习控制算法[J].制冷技术,2022,42(5):57-61.
[3] 李杰,邢笑笑.基于迭代学习PID的直流电机控制系统设计与实现[J].电子技术与软件工程,2022(17):140-143.
[4] 王守勤,贺兴时,耿燕.具有轨迹偏移的自适应迭代学习控制[J].西安工程大学学报,2022,36(5):119-125.
[5] FU H,HU C X,YU D D,et al.Cascaded iterative learning motion control of precision maglev planar motor withexperimental investigation[J].ISA transactions,2023 S0019-0578(23)00139-8 .
[6] 樊金辉.上肢康复机器人控制系统研究与设计[D].西安:西安工业大学,2021.
[7] 李亚锋.基于迭代学习控制的上肢康复机器人轨迹跟踪研究[D].兰州:兰州理工大学,2020.