上肢康复机器人辅助训练对脑卒中患者上肢功能的效果:基于功能性近红外光谱
2023-12-05宋建飞戴磊秦郑圆张妍顾欣璐陈嫣红李冬跃冯晓娟
宋建飞, 戴磊, 秦郑圆, 张妍, 顾欣璐, 陈嫣红, 李冬跃, 冯晓娟
1.浙江康复医疗中心康复评定与治疗中心,浙江 杭州市 310052;2.中国康复研究中心北京博爱医院作业疗法科,北京市 100068
0 引言
上肢康复机器人辅助训练是一项基于神经可塑性原理和功能重塑机制的现代康复治疗技术[1],其高度重复性、功能性和针对性的任务导向康复训练[2-3],可有效改善脑卒中患者上肢运动功能[4-5],也有利于提高日常生活活动能力[6]。但现有研究多关注肢体功能康复效果的评价[7-8]。
常见的脑功能检测方法有脑电图、fMRI、PET等,受场地、运动干扰等影响,很难有效检测脑卒中后运动状态下的脑功能[9-11]。功能性近红外光谱技术(functional near-infrared spectroscopy, fNIRS)具有安全无创、便于移动、抗运动干扰、抗电磁干扰、时空分辨率高、允许长时程监测等优点[12]。本研究采用fNIRS 客观评估上肢康复机器人辅助训练对脑卒中患者脑组织的血氧代谢和激活情况的效果。
1 资料与方法
1.1 一般资料
选取2022 年1 月至2023 年1 月浙江康复医疗中心32例脑卒中患者。
诊断标准:中国各类主要脑血管病诊断要点2019[13],经CT 或MRI 检查确诊,ICD-11 编码I64.X04。
纳入标准:①首发脑卒中伴偏瘫;②年龄18~75岁;③病程≤ 6 个月;④简易精神状态检查评分≥ 21分[14]; ⑤患者上肢改良Ashworth 分级≤ 2 级,Brunnstrom 分期≥ Ⅱ期;⑥双眼视力或矫正视力≥ 1.0;⑦本人或家属签署知情同意书。
排除标准:①伴有严重认知障碍、言语障碍,无法配合训练;②偏盲,存在视力障碍;③眩晕、耳鸣等前庭功能障碍;④严重骨关节疾病、严重心肺疾病无法训练;⑤病情恶化。
剔除与脱落标准:①治疗过程中出现严重的肺部感染、尿路感染、深静脉栓塞、癫痫等并发症;②治疗过程中病情加重;③未按医嘱执行或资料不全而影响疗效或安全性判定;④发生不良反应不宜继续进行研究,计入不良反应的统计;⑤本人或家属不愿意继续治疗。
患者按随机数字表法分为对照组和试验组,各16例。两组性别、年龄、病程、卒中类型、卒中侧别比较均无显著性差异(P> 0.05)。见表1。

表1 两组基线资料比较
本研究经浙江康复医疗中心医院伦理委员会批准(No.ZKLL21123105),已在医学研究备案登记信息系统备案(No.MR-33-23-038278)和中国临床试验注册中心注册(No.ChiCTR2300076155)。
1.2 方法
两组均接受常规康复治疗,对照组接受常规上肢康复训练,试验组接受上肢康复机器人辅助训练。
常规康复治疗包括运动治疗、作业治疗、物理因子治疗、言语治疗、针灸治疗等。
常规上肢康复训练包括针对上肢和手的肌力、耐力、关节活动度训练,滚筒、推力器、磨砂板、套圈训练等,具体方案由指定的专业治疗师根据患者的评估情况进行设计。每次20 min,每天1 次,每周5 d,共4周。
试验组进行上肢康复机器人辅助训练,每次20 min,每天1次,每周5 d,共4周。
采用XYKSZFX-1 型上肢反馈训练系统(翔宇医疗公司),由经验丰富的治疗师进行设定和操作。
采用系统评估模块评测患者功能状态,选择不同维度及相应关节活动的游戏,每次选择4 个游戏,每个游戏5 min。进行游戏时,肢体起始位均为前臂中立位,肩关节前屈90°。训练游戏包括一维、二维、三维3 个维度,肩、肘、前臂、腕及握力的单关节或多关节联合训练,由易到难依次选择。
每次训练结束后,治疗师可根据系统训练数据及时对患者的运动功能状态做出评价,并给予指导和鼓励。训练中,治疗师可根据患者运动功能的提高调整游戏难度或更换游戏。
出现任何不适或危及患者生命健康的情况,应立即终止训练,查明原因后再决定是否继续进行机器人辅助训练。
1.3 评定方法
分别于训练前后,由2 名工作经验3 年以上并对分组情况不知情的作业疗法师对两组进行评定。
1.3.1 Fugl-Meyer 评定量表上肢部分(Fugl-Meyer Assessment-Upper Extremities, FMA-UE)[15]
0 分表示不能做某一动作;1 分表示部分能做;2分表示能充分完成。总分66 分。分值越高,功能越好。
1.3.2 fNIRS检测与数据处理
治疗前后,采集两组坐位机器人辅助状态下,上肢模拟完成进食动作状态数据。采集时间以休息20 s,模拟进食20 s为一组,完成5组。
采用LABNIRS 功能性近红外脑成像系统(日本岛津公司),设备有22 个通道,探头置于受试者头部前运动皮质(premotor cortex, PMC)、辅助运动皮质(supplementary motor area, SMA)和初级运动皮质(M1),获得3 个fNIRS 参数(氧合血红蛋白、去氧血红蛋白和总血红蛋白)的稳定信号。计算每个通道的氧合血红蛋白和去氧血红蛋白的变化值。
激活分析:采用NIRS_SPM 对数据进行格式转换,设置基于小波去趋势,血流动力学响应函数平滑进行低通滤波后进行激活分析。
血氧浓度分析:采用Homer2 将数据光强信息转换为光密度。通过人工目视检查,对数据进行伪迹识别、标记与标记坏导;采用Homer2 的自动伪迹识别及插值校正,对数据进行伪迹矫正。采用Homer2 的带通滤波器,对数据进行带通滤波,截止频率分别为0.01 Hz和0.1 Hz,以消除生理噪声、高频机器噪声及缓慢漂移的影响。采用Homer2中修正的Beer-Lambert定律,将光密度转换为血氧浓度。
1.4 统计学分析
采用SPSS 26.0 进行统计学分析。计数资料以频数表示,组间比较采用χ2检验。计量资料符合正态分布,以(±s)表示,FMA-UE 评分组内比较采用配对样本t检验,组间比较采用独立样本t检验。fNIRS 数据资料采用单因素方差分析。显著性水平α= 0.05。
2 结果
2.1 FMA-UE
干预前,两组FMA-UE 评分比较无显著性差异(P> 0.05)。干预后,两组FMA-UE 评分均显著改善(P< 0.001),试验组优于对照组(P< 0.05)。见表2。

表2 两组治疗前后FMA-UE评分比较
2.2 fNIRS
fNIRS 激活结果显示,治疗后,试验组通道17 激活明显增加(P< 0.01),且优于对照组(P< 0.05)。见图1、表3。
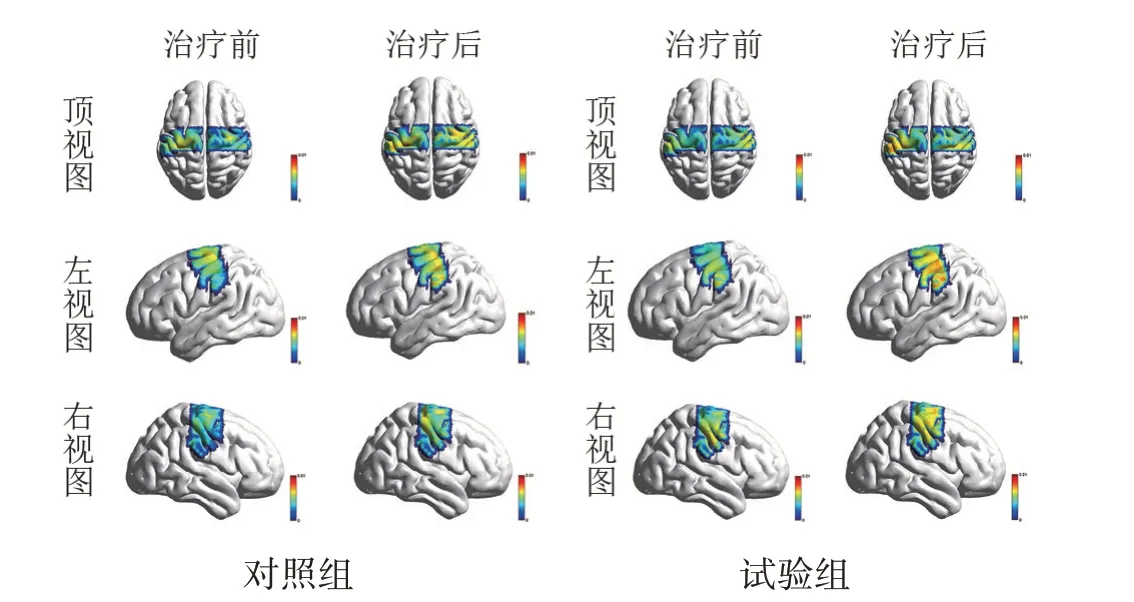
图1 两组治疗前后fNIRS测试激活示意图

表3 两组治疗前后脑区激活的估算边际值比较
fNIRS 血氧浓度结果显示,治疗后,试验组通道17 血氧浓度明显增加(P< 0.01),且优于对照组(P<0.05)。见图2、表4。

表4 两组治疗前后血氧浓度的估算边际值比较
3 讨论
本研究显示,上肢康复机器人辅助训练可提高脑卒中偏瘫患者上肢运动功能,且效果优于传统治疗。可能与以下因素有关。①上肢康复机器人辅助训练提供的高重复性任务训练,使上肢功能得以高效训练[16];②患者通过训练系统提供的视觉、听觉实时反馈,可以及时、主动调整运动模式[17];③训练系统通过自带评估软件设计的有针对性、目的性较强的任务导向训练,对促进患者运动皮质代表区功能重组具有重要作用[18]。既往研究表明,上肢康复机器人辅助康复训练可以显著改善脑卒中患者上肢运动功能[19-21]。本研究与之一致。
fNIRS 可以通过分析大脑皮质的血氧浓度间接反映大脑活动,从而间接反映大脑神经元的活跃状态[22-24],因其具有较高的时间和空间分辨率,设备具有便携性[25]等优点,在脑卒中的运动康复研究领域广泛应用。本研究采用fNIRS 进行上肢任务态的脑功能检测,结果显示两组大脑血流信号确有不同改变,能够在无创的情况下观测到脑区的活动,有助于深入探讨上肢康复机器人的作用机制。
Miyara 等[26]采用fNIRS 检测脑卒中患者使用上肢康复机器人进行腕部被动运动时的大脑激活模式,发现与慢速(0.25 Hz)、中速(0.5 Hz)的腕部被动运动相比,快速腕部被动运动(0.75 Hz)能更好地激活患侧半球的运动相关皮质区域,有助于确定最佳的腕部运动频率。Mihara 等[27]采用fNIRS 研究发现,脑卒中患者在平台快速向前、向后移动干扰时,顶叶皮质、SMA和前额叶皮质激活,这些区域对患者的平衡控制必不可少。Shi等[28]通过fNIRS观察发现,采用上肢康复训练系统执行非阻力运动画圈任务时,患者的皮质激活较为明显,阻力运动时辅助运动区和运动前区的激活程度更高。本研究fNIRS 信号采集位于额叶运动皮质的BA4 和BA6,主要包括BA4 区的M1、BA6 区外下部分的PMC 和BA6 区内上部分的SMA。上肢机器人辅助下模拟进食动作开始于视觉系统确定抓握任务,并将信号传递到皮质运动区域,由M1 区产生神经冲动,冲动信号向下传递至脊髓,控制手臂和手的肌肉运动执行;同时PMC 和SMA 负责模拟进食时的上肢运动感觉和空间指导及上肢运动协调等工作。本研究显示,上肢康复机器人辅助训练较常规上肢康复训练对脑卒中偏瘫患者大脑血氧浓度及皮质激活有显著作用,与以往研究一致,其改善与患者的上肢运动功能改善相关。主要位于BA4区的通道17。
本研究样本量相对较小,fNIRS 评估研究还不够深入。在未来的研究中,将扩大样本量,增加功能评估手段,深入设计fNIRS 评估分析方案,以便更全面探究功能恢复的脑部机制。
4 结论
本研究通过fNIRS,客观评价脑组织的血氧代谢和激活情况,发现上肢康复机器人辅助训练能改善脑卒中患者上肢运动功能,促进大脑血氧代谢和皮质激活。
利益冲突声明:所有作者声明不存在利益冲突。
