基于改进ORB-SLAM2的机器人同步定位与建图技术研究
2023-12-02阳霜韦晓慧周志伟彭国超
阳霜,罗 堪,韦晓慧,周志伟,彭国超
(1.湖南机电职业技术学院,湖南长沙 410151;2.长沙师范学院,湖南长沙 410100)
0 引言
随着机器人技术的飞速发展,如何实现机器人在未知环境下的定位与导航,并自主地完成特定任务,是一个火热的研究方向。在深海、隧道、室内等应用场景,GPS等全球卫星定位系统的信号存在高衰减现象,机器人面临“在哪里”“去哪里”“怎么去”等问题。为了实现这些功能,让移动机器人能够同步定位与建图(SLAM),需要让其能够明确自身的位置和位姿,感知周围环境的信息并创建地图。这一技术的发展,对于实现机器人的智能定位与导航具有非常重要的意义。
目前,SLAM技术主要分为两类:基于激光雷达的SLAM[1]和基于视觉的SLAM[2],这两种技术在机器人定位和地图构建方面都有广泛的应用。其中,激光SLAM 是一种较为成熟的方法,已成功应用于多种商业产品。然而,激光SLAM 构建的地图信息过于简单,无法让机器人获取更丰富的环境信息[3]。视觉SLAM 是近十年来发展迅速的SLAM 解决方案,可以使用摄像头重建3D 地图。此外,图像中包含丰富的物体信息,可以帮助机器人完成各种基于视觉的智能任务[4]。
Cesar Cadena 等人将视觉SLAM 的发展,划分为三个代表性的时代[5],第一个时代“经典时代”,主要解决SLAM 问题,凭借提出的数学公式,SLAM问题首次得到了有效应用。第二个时代“算法改进时代”,引入GPU、RGB-D、立体相机等新硬件,用于改进视觉SLAM 算法。第三个时代“提高鲁棒性时代”,主要是针对特定场景,提高系统鲁棒性。比较有代表的是基于稀疏直接法的视觉里程计(DSO, Direct Sparse Odometry)[5],ORB-SLAM[7]等算法,这一时期SLAM 问题最大的挑战,是在控制计算量大小的情况下,构建一致收敛的轨迹和地图,保证移动机器人定位精度的同时,提高算法的运行效率。2017年Mur-Artal R等,在ORB-SLAM 算法基础上,开源了ORB-SLAM2[8]方案,新增了对双目相机、RGB-D 相机的源生支持,是目前市场上主流的具有实时性好、地图重用和动态管理关键帧等优点的完整视觉SLAM 系统。D3VO[9]是一种基于深度学习的视觉里程计框架,由Stumberg等人在2020年提出。该框架将深度学习的深度估计、位姿估计、不确定度估计应用于视觉里程计方法中,以优化前端追踪效果,并提高后端非线性优化的性能[10],但目前的深度学习解决方案仍处于探索阶段,对数据和计算机设备要求较高,且现有的模型还不够成熟,运行效果有待提高。
综上所述,ORB-SLAM2 是目前视觉SLAM 中,最前沿的同步定位与建图算法之一,本文选择ORBSLAM2 算法,对机器人进行同步定位与建图,提出自适应降低阈值的方法提取特征点,当通过高响应阈值搜索,未搜索到特征点时,自适应逐级降低阈值搜索特征点,提高所提取特征点的响应值,从而提高移动机器人在未知环境下,进行同步定位与建图的精度。
1 ORB-SLAM2简介
ORB-SLAM2由跟踪、局部建图、闭环优化检测三大线程组成,如图1所示。

图1 ORB-SLAM2框架图
在跟踪线程中,首先从图像中提取ORB 特征点,并运用四叉树法对这些特征点进行筛选。然后,根据上一帧的位姿信息,进行位姿估计或进行重定位以初始化位姿。接下来,跟踪线程会跟踪重建局部地图,并进一步优化位姿以确定新的关键帧。
在局部建图线程中,机器人会将跟踪线程生成的新的关键帧插入,并验证最新获取的地图点,进而构建新的地图点。这些地图点通过局部捆集调整(Local BA)进一步优化,最后机器人会对插入的关键帧进行筛选,删除冗余关键帧,实现局部地图构建。
为了减小之前步骤所积累产生的误差,闭环优化线程的主要任务是通过词袋库判别闭环帧。然后,利用Sim3算法计算相似变换,对地图进行矫正及优化,从而减小之前步骤中,所积累产生的误差。
系统的地图由4个部分组成,即地图点、关键帧、一致图和生成树。其中,一致图是由节点和边构成的数据结构,节点指的是关键帧,边是关键帧之间的联系。生成树则是按照地图点和关键帧之间的关系,以树状结构进行存储,用于查找相邻的关键帧。
位置识别模块包括视觉词袋和识别数据库两部分。视觉词袋利用ORB特征信息对特征点进行分类,实现位置的快速匹配。识别数据库是利用关键帧所匹配的特征点,与视觉词袋进行关联,将相似度得分最高的,形成关键帧数据库,运用到重定位及回环检测。
2 ORB特征点提取优化
原算法在跟踪线程中提取ORB特征点时,争取特征点在图像的所有部分分布均匀,将图像分为30*30大小的CELL 区域,然后对每个CELL 搜索特征点,优先使用高响应阈值搜索特征点,若使用高响应阈值没找到特征点,则将搜索阈值调整为低响应阈值,重新对该CELL 进行搜索,直至将所有CELL 搜索完毕后,特征点提取工作结束。
由于原算法,在ORB 特征点提取环节,若通过高响应阈值没有搜索到特征点,直接采用低响应阈值进行搜索,由于高响应阈值与低响应阈值之间的跨度较大,因此在搜索特征点时,提取了较多低响应值特征点,将增大后续特征点筛选及匹配误差,从而影响机器人在进行同步定位与建图的精度。
本文对提取ORB特征点算法进行改进,若通过高响应阈值搜索,未搜索到特征点,则将搜索响应值在原搜索响应值的基础上,降低t来搜索特征点。如果此时搜索到特征点,则记录特征点后,来到下一CELL进行特征点搜索;若未搜索到特征点,且此时搜索响应值大于低响应阈值,则在此搜索响应值的基础上,再次降低t来搜索特征点。由此,通过将响应值逐次降低t来搜索特征点,直至遍历完所有的CELL,如图2所示。通过对响应值进行自适应调整,在特征点提取时,将有效减少低响应值的特征点,在降低后续对特征点进行筛选与匹配的误差的同时,还可以减少特征点匹配的工作量,提高系统运行效率。
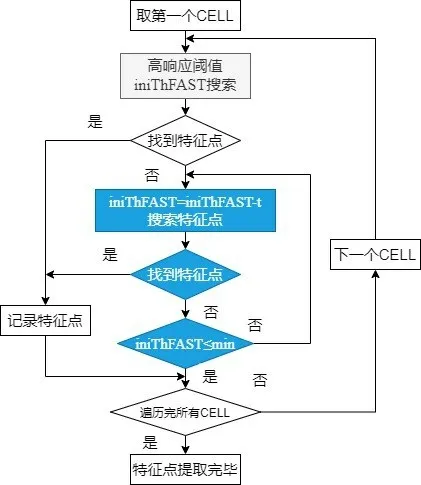
图2 特征点提取优化流程图
3 实验与分析
3.1 数据准备
EuRoC MAV 数据集是微型飞行器(MAV)上收集的视觉惯性数据集。数据集包含立体图像、同步IMU测量以及准确的运动和结构地面实况。本文采用Eu-RoC MAV 数据集中的01、03、05 号场景,各数据集特点如表1所示。通过对三个数据集进行比较,得知厂房01的数据拍摄条件最好,飞行器运行速度低,拍摄场景纹理及光照均较好,厂房03 的数据较厂房01 而言,运行速度有所加快,而厂房05的数据最难,不仅运行速度快,其场景的纹理及光照条件均较差。因此,笔者利用这三个数据集,来运行原始ORB-SLAM2 算法及改进后的ORB-SLAM2 算法,有助于分析算法对高速运行、弱纹理、光照较差的不良条件的鲁棒性。

表1 数据集介绍
3.2 评价标准
针对改进算法和原始算法,分别计算相对定位误差(RPE,Relative Positioning Error) 和绝对定位误差(APE,Absolute Positioning Error) 的 均 方 根 误 差(RMSE)、标准差(σ)。
APE是估计位置(2D 或3D)与真实位置之间的欧几里得距离,用于检验算法的全局准确性和稳定性。其RMSE计算如式(1),RMSE越小,估计轨迹越接近真实轨迹,标准差计算如式(2):
式中,n表示关键帧数目,i表示第i个关键帧,xobs.i表示第i个关键帧姿态真实值,xmodel.i为第i个关键帧姿态的估计值。
式中,n表示关键帧数目,i表示第i个关键帧,xmodel.i表示第i个关键帧姿态真实值,μ为xmodel.i为的平均值。
RPE是连续位置估计(2D 或3D)之间的欧几里得距离,用于计算漂移,即每米的平移或旋转误差。第i帧的RPE定义如下:
式中,Pi表示第i帧的估计位姿,Qi表示第i帧的真实位姿,Δt表示间隔时间。
式中,n表示观测次数,Δt表示时间间隔t,m=n- Δt×RPE,Ei表 示i时 刻 相 对 位 姿 估 计 误 差,trans(Ei)代表相对位姿误差中的平移部分。
相对定位误差、绝对定位误差的具体计算,可运用开源的EVO Python计算包进行计算。
最后运用式(5)计算估计轨迹与真实轨迹长度的相对误差,用于评价算法对轨迹尺度估计的能力。
3.3 误差分析
运用原算法及改进算法,对厂房01、03、05号数据集进行同步定位与建图仿真,其绝对定位误差及相对定位误差比较,分别如表2、表3所示。

表2 不同数据集下APE对比表

表3 不同数据集下RPE对比表
从表2、表3 可知,改进算法的相对定位误差的RMSE与σ值,略小于原算法,而改进算法的绝对定位误差的RMSE与σ值,远优于原算法,三个场景中,其绝对定位误差的RMSE的平均值下降了15.87%。由此可知,改进算法在进行机器人同步定位与建图时,其漂移误差略微减小,而其全局准确性和稳定性得到大幅提升。
对改进算法在厂房01、03、05,三个不同场景下的APE、RPE进行比较,其中厂房01 和厂房03 的APE、RPE相差较小,而厂房05 的APE、RPE较另两种相差略大,说明改进算法对高速运动的鲁棒性较好,而对于弱纹理的鲁棒性有待提高。
运用ORB-SLAM2改进算法,对厂房01、03、05数据集进行同步定位与建图仿真,其轨迹仿真如图3所示,图中X、Y、Z 为三维空间坐标轴,图例data 为真实轨迹,图例KeyFrameTrajectory 为估计轨迹。通过对图3进行观察,可分析估计轨迹与真实轨迹的拟合程度,其中厂房01与03的轨迹仿真图中,估计轨迹与真实轨迹无较大轨迹错位,几乎重合,而厂房05的估计轨迹与真实轨迹在某一区域内,存在一定偏差。再次验证了,改进算法对高速运动的鲁棒性较好,而对于弱纹理的鲁棒性有待提高。

图3 轨迹仿真图
ORB-SLAM2 改进算法对厂房01、03、05 数据集仿真,其真实轨迹与估计轨迹长度,及轨迹长度误差计算,如表4所示。从表中数据分析可知,估计轨迹长度均与真实轨迹长度相近,且误差较小。结合轨迹仿真图及轨迹长度比较表,总体来说,对ORB-SLAM2算法进行ORB特征点提取优化后,能够较好地实现机器人同步定位与建图。

表4 轨迹长度比较表
4 结论与展望
通过上述实验分析,在提取ORB 特征点时,通过对响应值进行自适应调整,对ORB-SLAM2 算法进行改进,能够较好地应用于未知环境下,机器人同步定位与建图。通过实验数据对比分析可知,改进算法的相对定位误差的RMSE与σ值,略小于原算法,而改进算法的绝对定位误差的RMSE与σ值,远优于原算法,三个场景中,其APE的RMSE的平均值下降了15.87%。由此可知,通过对ORB-SLAM2算法进行改进,在进行同步定位与建图时,每米的平移或旋转误差略微有所下降,准确性及稳定性得到较大提高,估计轨迹更接近于真实轨迹。因此,运用改进算法使机器人在未知环境下,进行同步定位与建图的精度得到提高。
通过对厂房01 和厂房03 的绝对定位误差、相对定位误差、轨迹仿真图进行对比,得知改进算法,对于高速运动的鲁棒性较好,但对厂房05与厂房01、03场景的绝对定位误差、相对定位误差、轨迹仿真图进行对比,得知后续对于环境光照变化、低纹理环境等问题,如何提升系统鲁棒性,提高智能移动机器人定位与导航精度,仍有待加强研究。
另外,视觉SLAM 主要用于机器人或无人机等嵌入式平台的场景识别、深度学习、3D重建等应用。如何在提高机器人或无人机进行实时定位与导航精度的同时,加快运行速度,还有待进一步探索。
