无人机巡检智能管理系统在电网巡检作业中的设计及运用研究
2023-12-01国网扬州供电公司朱翔宇林芝茂
国网扬州供电公司 朱翔宇 林芝茂
1 引言
定期开展电网巡检才能够保障电力系统输电安全,无人机巡检智能管理系统则为电网巡检作业提供了新的平台和技术,便于巡检人员开展对电网系统的安全、快速、全面巡检,具有十分广阔的应用及研究前景[1]。此外,无人机巡检智能管理系统在完成常规电网巡检作业的基础上,能够通过智能任务规划及分析诊断功能持续提高电网巡检作业质量及技术水平,从而推动电网巡检作业向自动化、电力化、综合化方向发展,最终创造更为显著的社会效益和经济效益。
2 电网巡检作业无人机类型选择
无人机为通过无线遥控器及程序控制的、能够实现自主导航及飞行的飞行器,根据结构形式可以划分为无人直升机、多旋翼无人机以及固定翼无人机3类,不同类型无人机在电网巡检作业中的应用场景及应用特征存在差异。
无人直升机包括小型机、中型机两类,应用优势包括支持空中悬停及垂直起降,便于拍摄固定物体[2];航行速度较快,最大为100km/h;载重量大,便于搭载大型装置。
应用不足包括航行时间有限、对起降场地要求较高,不适合长距离电网巡检作业;如果电网规划未能留出足够巡检作业空域,会因视觉盲点、空域不足等原因导致无法起飞。无人直升机普遍应用于精细化、多任务、中距离电网巡检作业,能够实现对于电力系统及电力设备的细节诊断和故障分析[3]。
多旋翼无人机包括四旋翼无人机、六旋翼无人机以及八旋翼无人机3类,应用优势包括结构简易、不占用航道,无须申请专门的巡检作业空域;对起降场地要求较低,无须任何辅助装置便可实现随时起飞降落[4];支持近距拍摄,能够获取高清实时影像。应用不足包括动力较小、自重较轻,需要在特定载重条件下飞行;续航时间较短;航行速度较慢;容易受恶劣天气影响。
多旋翼无人机普遍应用于短距离电网巡检作业,能够实现对于电力系统及电力设备故障的细节化、定点式观察。固定翼无人机应用优势包括机动性较高、航行速度较快,适合长距离电网巡检作业;载重量大;反应速度较快。应用不足包括:不支持近距拍摄、空中悬停,不适合精细化电网巡检作业。固定翼无人机普遍应用于大范围、长距离输电线路通道走廊巡检作业[5],能够实现对于电力系统周边建筑空间的重点检测。考虑到3类无人机均具备明显应用优势及不足,在开展电网巡检作业时一般选择同时应用2类无人机。例如,无人直升机和固定翼无人机、固定翼无人机和多旋翼无人机,以此实现优势互补,满足更多电网巡检作业要求。
3 无人机电网巡检作业智能管理系统设计分析
3.1 系统框架结构
本次设计由无人机飞行平台、数据采集系统、数据通信链路系统、地面数据处理系统4部分构成的无人机电网巡检作业智能管理系统。
3.2 无人机飞行平台
无人机飞行平台包括自稳云台、飞行动力系统、飞行控制系统、自主避障系统、数据采集系统以及POS系统(定位定姿系统)等。不同类型无人机的飞行动力系统构成存在差异,例如,多旋翼无人机的飞行动力系统包括桨叶、机架、无刷电机以及动力能源(电力资源、航空煤油资源)。
飞行控制系统包括地面控制平台、机载控制器,机载控制器则包括传感器、飞行控制计算机、执行机构。传感器收集和测量无人机飞行参数(高度、速度、航向);飞行控制计算机根据地面控制平台指令计算分析无人机飞行参数,并且以机器码的形式将计算分析结果发送至执行机构;执行机构根据地面控制平台指令完成无人机飞行调整及控制。
传感器无人机飞行参数收集和测量具体流程如下:通过安装在相互垂直位置处的3个角速率陀螺仪测量三轴方向的角速度;对测量得到的角速度进行积分换算;通过加速度姿态传感器开展对传感器输出信号的去噪处理,以此修正传感器漂移问题;从而计算出无人机旋转角度。现以飞行高度为例,进一步设计无人机飞行参数收集和测量流程,飞行高度需要通过环境大气压强获得,环境大气压强具体收集和测量流程如图1所示。
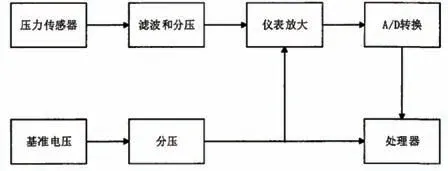
图1 环境大气压强收集和测量流程
在此基础上,将环境大气压强设置为P、无人机飞行高度设置为H,两者的关系:
T0为热力学温度,L为气压高度差,P0为标准大气压,R为常数(取值为8.51),m为气体分子量,g为重力加速度。现以标准海平面为基本平面,可以得到无人机飞行高度每增加8.5m环境大气压强便下降100Pa的结语,由此可以得到无人机飞行高度计算如式:
例如,现为小型六旋翼无人机搭建飞行平台,选择应用M600 pro飞行平台,搭载了3套GNSS模块和IMU模块,设置了陀螺仪、GPS、气压计等多种类型传感器,支持悬停模式、自稳模式等多种飞行模式,垂直方向悬停精度为0.5m,水平方向悬停精度为1.5m。配合电网巡检作业智能管理软件,以此实现对于输电线路三维点的云解算及测量分析,对于输电线路交叉跨越的观察分析,对于高温、风偏、覆冰等输电线路运行工况的模拟检测,对于相间距的测量分析,对于弧垂、温度等三维激光数据的测量分析及处理应用。
3.3 多传感器数据采集系统
多传感器数据采集系统包括数据获取设备、自稳云台、POS系统。数据获取设备采集机载成像设备航摄数据,包括采集输电线路及架设杆塔光学影像的光学相机、采集输电线路均压环及绝缘子发热状况的红外热像仪等。自稳云台搭载数据获取设备,同时通过驱动电机对航摄俯仰角度进行控制,通过三轴自稳防抖功能减少无人机飞行振动。
POS系统向地面控制平台回传无人机飞行参数,并且隔离对无人机飞行影响较大的外部扰动,为无人机飞行成像过程提供补偿参数。
3.4 数据通信链路系统
数据通信链路系统包括机载信号发射与接收装置、地面站信号发射与接收装置,用于完成无人机和地面站的数据通信,并且满足恶劣通信环境、强电磁干扰环境的通信要求。
3.5 地面数据处理系统
地面数据处理系统包括智能诊断系统、几何处理系统、数据预处理系统等,对无人机航拍数据进行系统处理分析,在此基础上结合输电线路运行特征完成故障定位、隐患排查、缺陷分析等作业。
4 无人机电网巡检作业智能管理系统运用分析
4.1 电网巡检基础流程
本次设计的无人机电网巡检作业智能管理系统基础运行流程如下:无人机自主获取输电线路GPS地理坐标信息并且实现自主导航;通过机载成像设备识别及拍摄输电线路及其架设杆塔;通过数据通信链路系统将实时采集的位置信息、图像信息及无人机飞行信息上传至地面站;地面数据处理系统自动接收并保存无人机传输信息,根据信息实现对无人机自主飞行的有效控制,根据信息在线处理及分析结果对输电线路潜在故障及安全隐患进行判断排查,随后由巡检人员进行人工筛选排查获得电网巡检结果。
4.2 电网巡检模式分析
4.2.1 手动电网巡检
手动电网巡检对于无人机电网巡检作业智能管理系统而言较为简单,通过无线遥控器及地面站便能实现,具体运行流程如下:通过遥控器、地面站实时监控画面完成对于无人机运行(起降、变速、变向)的控制,使得机载成像设备能够完成近距拍摄、定点拍摄等动作。
4.2.2 一键电网巡检
一键电网巡检为无人机电网巡检作业智能管理系统的关键电网巡检模式,即通过北斗卫星系统及算法控制无人机按照设定好的关键坐标点完成自主飞行,同时在飞行过程中自主躲避障碍物、自主完成检测拍摄动作。
一键电网巡检具体运行流程如下:通过搭载RTK差分技术的高精度定位装置规划无人机电网巡检路径,确保无人机在复杂地理环境中也能够实现精准定位;根据无人机电网巡检路径规划无人机电网巡检流程,获得无人机飞行路径点,确定无人机自主飞行关键坐标点,确保无人机可以实现定点飞行;地面站根据无人机飞行情况及电网巡检要求删除不合理、不科学路径点,并且对各个路径点的相对位置关系进行逐一校,确保无人机电网巡检路径不会出现交叉、重复问题;根据无人机飞行时间、飞行距离配置无人机电源,确保无人机飞行能力可以达到一键电网巡检要求。
某地区选择根据基杆塔情况设计配电网架空线路无人机巡检路径,具体流程如下:划分输电线路架设杆塔类型,将连续跨度等于0基杆塔的塔杆设置为A类型,跨度小于2基杆塔的杆塔设置为B类型,跨度大于2基杆塔的杆塔设置为C类型;根据输电线路架设杆塔类型调整无人机自主飞行关键坐标点,略去A类型杆塔中间杆塔降落点,顺次连接前号杆塔的后序连接点、后序杆塔的前序连接点,将降落点设置为基杆塔降落点;补全B类型塔杆中间缺失的杆塔,随后重新规划无人机巡检路径,删除中间缺失杆塔的路径点;选择杆塔最高点上方15m位置处为前后序连接点,顺次连接前后杆塔的前后序连接点。
根据三维坐标空间可以得到无人机水平飞行距离计算表达式、无人机垂直飞行距离计算表达式以及无人机飞行时间计算表达式:
计算无人机飞行时间、飞行距离,判断无人机飞行能力是否可以达到此次电网巡检作业要求;无人机飞行距离即为起飞点到结束点所有路径点的距离总和。
5 结语
无人机巡检智能管理系统切实提高了电网巡检作业质量,通过系统化设计、自动化结合手动化实践优化了电网巡检资源配置,便于为后续电力系统运行维护提供准确信息。具体来讲,电网巡检作业时一般选择同时应用无人直升机、多旋翼无人机、固定翼无人机中的2类无人机,在此基础上按照无人机飞行平台、多传感器数据采集系统、数据通信链路系统、地面数据处理系统的框架结构设计无人机电网巡检作业智能管理系统,从而完成手动电网巡检和一键电网巡检,实现高效电网巡检。
