基于正十二面体靶标多机器人定位系统研究*
2023-11-28乔贵方周霆威田荣佳
陈 涛,刘 娣,乔贵方,周霆威,田荣佳
(南京工程学院自动化学院,南京 211167)
0 引言
随着机器人技术的快速发展,机器人在人类生活中占据了越来越重要的角色[1]。相比于单机器人系统,多机器人系统在协同搬运得到了越来越多的学者关注。其中,分布式编队、多机器人建图导航等问题都是多机器人系统的研究热点[2-4]。定位技术是多机器人系统协同作业的关键技术之一。目前,多机器人定位系统可以分为绝对定位系统与相对定位系统[5]。其中,绝对定位系统主要包含基于多视觉传感器的运动捕捉系统、WiFi定位、北斗或全球定位系统等[6-7],此类系统是将机器人的位姿表达在固定的参考坐标系下。而相对定位系统主要包含惯性导航、航迹推算等,该系统是以机器人的初始状态作为参考计算相应的位姿。
刘冉等[8]提出一种基于超宽带(ultra-wide band,UWB)融合里程计的多机器人定位方法,该方法的平均定位误差为0.312 m。吴玉秀等[9]提出一种基于声音的多机器人定位方法,每个机器人通过检测与发声机器人之间的相对位置,该系统的平均定位误差为0.16 m。廖志涵等[10]提出一种基于标签的室内机器人全局定位系统,该系统将AprilTag标签粘贴在天花板上作为参考锚点,移动机器人通过单目摄像头实现全局定位,该系统的平均定位精度为0.1 m,但该系统检测范围受限于AprilTag标签的检测视角,因此需要在工作场景中布置大量的标签。但基于视觉的定位系统具有相对较高的定位精度。
因此,本文通过结合AprilTag标签与多面体结构,设计一种正十二面体AprilTag靶标,通过该靶标装置既能够有效地降低单目视觉定位系统检测误差的同时,又能够扩展定位系统的检测范围。
1 AprilTag标签识别算法
AprilTag标签广泛应用于AR、机器人、视觉校准等领域[11-12],其标签形式如图1所示。该标签能够实时计算其与相机间的相对位姿,在识别过程中主要包含AprilTag标签预处理、四边形检测、编码与解码、位姿解算。AprilTag标签有不同的家族,其对应的标签点阵各不相同,如图1所示的Tag36h11标签,该二维码边长为8个黑边,其中的有效编码区域是除去外部黑边的6*6的部分,该部分区域有黑有白,黑的区域被编为1,白的区域被编为0,从而得到36位的二进制编码。该二进制编码还包含其对应的ID信息。最后,根据标签已知的4个顶点坐标即可求出相对于原始坐标的单线性变换矩阵,分解该矩阵就可求出旋转变换向量以及平移变换向量。
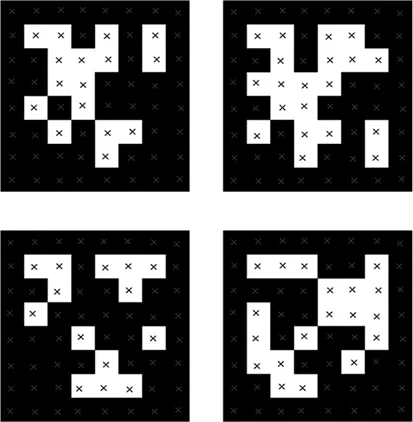
图1 Tag36h11标签
2 正十二面体AprilTag靶标与坐标系转换
2.1 正十二面体AprilTag靶标
AprilTag标签具有检测位姿范围有限和检测精度较低等问题。为解决该问题,本文提出了一种将AprilTag标签与正十二面体相结合的立体靶标识别装置,如图2a所示。正十二面体相较于其他正多面体既可以保证单点位姿下AprilTag标签识别的数量,又可以保证AprilTag标签的有效识别。该立体靶标识别装置在正十二面体的表面分别粘贴AprilTag标签,当机器人与视觉传感器之间的相对位姿变化较大时,正十二面体表面的AprilTag标签仍能够被视觉传感器检测到,从而扩大了位姿测量范围。除此以外,由于在同一角度下,视觉传感器能够检测2个以上的AprilTag标签,通过正十二面体表面之间的位姿转换约束,可以提升AprilTag的相对位姿检测精度。
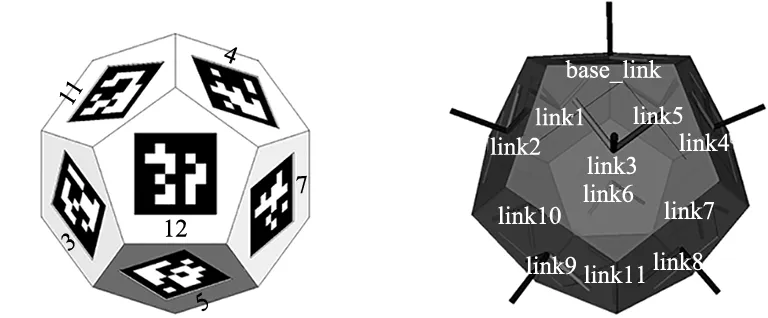
(a) 正十二面体AprilTag靶标 (b) AprilTag坐标系转换
2.2 AprilTag坐标系转换
如图2b所示,选择正十二面体的其中一面的中心为原点构建正十二面体的参考坐标系,将其他11个面的AprilTag标签引入正十二面体坐标系中,根据正十二面体的面与面之间的空间位置关系,分别计算得到贴在正十二面体上的其他11个面的AprilTag标签在正十二面体坐标系下的相对位姿Trefi(i=1,2,…,11)。
本文利用常规的AprilTag标签识别算法对视觉传感器视角范围的正十二面体AprilTag靶标表面的AprilTag标签进行位姿检测,当前视图中AprilTag标签在视觉传感器坐标系下的位姿矩阵Ti,其对应的相对位姿矩阵为Trefi,那么通过第i个AprilTag标签可以计算得到在视觉传感器坐标系下的正十二面体的空间位姿矩阵T:
(1)
由于每个视图中可以检测出多个AprilTag标签,将以上得到空间位姿矩阵T的均值作为正十二面体在视觉传感器坐标系下的空间位姿矩阵Tf。
(2)
式中:n为视觉传感器每一帧检测到的AprilTag标签数量。
由于正十二面体AprilTag靶标与被测物体的空间相对位姿转换关系已知,记为Trefk,则被测物体在视觉传感器坐标系下的位姿矩阵Trefc为:
Trefc=TfTref-1k
(3)
3 实验验证与结果分析
为了验证正十二面体AprilTag靶标位姿检测算法,本文利用Staubli TX60工业机器人搭建了位姿精度检测实验平台,如图3所示。Staubli TX60工业机器人的重复定位精度为±0.02 mm,绝对定位精度为±0.3 mm,可以作为实验中标签与靶标的位姿真值。实验中以Staubli TX60工业机器人的反馈位姿作为检测位姿的真值。AprilTag标签识别算法运行在Ubuntu18.04系统和ROS环境下。本文采用Intel RealSense D435i视觉传感器,其分辨率为1280*720。将单个AprilTag标签和正十二面体AprilTag靶标通过转接板分别安装在Staubli TX60工业机器人的末端法兰盘上,视觉传感器与末端法兰盘之间的测量距离保持在1 m左右。本文的实验数据均在MATLAB软件中处理。

(a) 单个AprilTag标签位姿检测 (b) 与正十二面体AprilTag靶标位姿检测
3.1 视觉传感器标定
为提升位姿检测精度,本文利用MATLAB Calibration Tools工具箱对视觉传感器进行标定。相机标定获取的棋盘格标定板图像如图4所示,棋盘格标定板的网格大小为27 mm×27 mm。图5是视觉传感器在不同角度拍摄的40张棋盘格标定板的投影图像。为提升标定精度,对平均像素误差较大的图片进行剔除,最后剩余25张图片,标定后的视觉传感器的平均像素误差如图6所示。

图4 标定过程中拍摄到的棋盘格
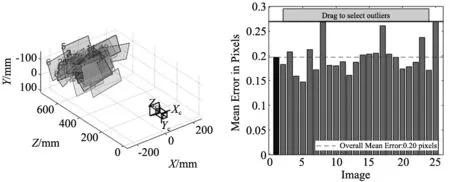
图5 标定过程中棋盘格的投影图6 剔除平均像素误差较大图片后的相机标定误差
标定后可得到视觉传感器的内参矩阵与畸变向量分别如式(4)与式(5)所示。
(4)
式中:fx和fy为视觉传感器在x和y方向上的焦距,cx和cy为视觉传感器像素坐标系中心原点在x和y方向上的平移。
P=[k1k2p1p2]=[0.0695 -0.0932 0 0]
(5)
式中:k1和k2为视觉传感器的径向畸变系数,p1和p2为视觉传感器的切向畸变系数。
3.2 单个AprilTag标签位姿检测
AprilTag标签与ArUco标签都是常用的位姿检测标记,本文通过实验对比两者的定位精度,实验中将两者分别固定在Staubli TX60工业机器人的末端法兰上,并沿着机器人基座标系的x轴、y轴及z轴以10 mm间距分别移动6次,相机距离标签300 mm的位置分别测量3个轴方向上的6个位姿点,从而求取各个轴上的5个相对位置误差。实验结果如表1所示,从表1中可以看出Apriltag标签的综合定位精度优于ArUco标签,因此,本文选择AprilTag标签作为正十二面体靶标标记。

表1 AprilTag标签与ArUco标签相对位置误差 (mm)
再通过实验对不同大小的AprilTag标签进行位姿识别精度的验证。将不同大小的标签固定在Staubli TX60工业机器人的末端法兰盘上,控制机器人沿着基座标系的x轴方向(朝着视觉传感器)以50 mm距离递进移动6次,分别测量这6个位姿点,从而求取位姿相对误差。实验中AprilTag标签的尺寸分别取30×30 mm,50×50 mm,70×70 mm,90×90 mm,110×110 mm。实验结果如图7和图8所示,从图中可以出,无论是相对位置误差还是相对姿态误差,AprilTag标签越大,所检测出来的位姿精度都会有所提升,并且误差的波动也会越来越小。
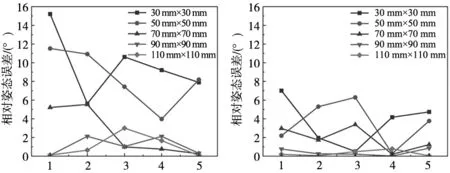
(a) 标签x轴相对姿态 (b) 标签y轴相对姿态
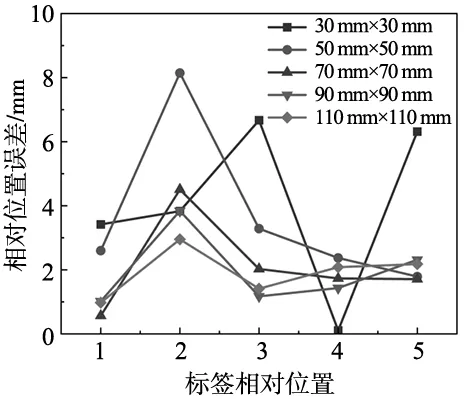
图7 不同大小AprilTag标签相对位置误差
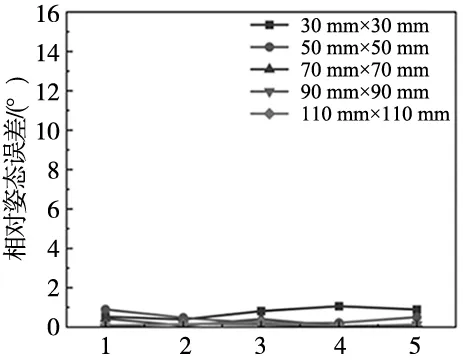
(c) 标签z轴相对姿态
为进一步确定AprilTag标签的尺寸,表2中计算出位姿误差的均值。从表2中看出AprilTag标签的尺寸在90×90 mm时,相对位置误差约为2 mm,相对姿态误差约为1°,相对位姿误差趋于平稳。
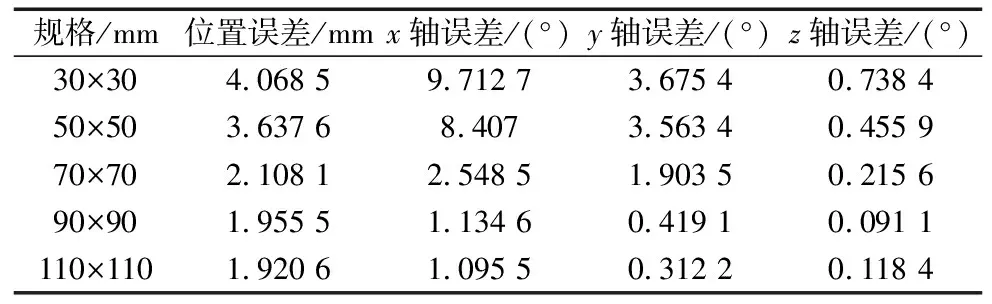
表2 不同大小AprilTag标签平均相对位姿误差
3.3 正十二面体AprilTag靶标位姿检测
本文利用3D打印机制作正十二面体AprilTag靶标,选取AprilTag标签的大小为30×30 mm,将每个面所对应的AprilTag标签贴在正十二面体表面上,最后将正十二面体AprilTag靶标通过连接件固定在Staubli TX60工业机器人的末端法兰上,所搭建的实验场景如图3b所示。分别控制Staubli TX60工业机器人的末端法兰沿着其基座标系的x轴、y轴、z轴的方向以50 mm间距移动6次,分别测量在这3个轴方向上的6个位姿点,从而求取各个轴上的5个相对位姿误差。
经过实验得到的各个轴方向上的相对位姿误差如图9与图10所示。从实验结果中可以看出正十二面体AprilTag靶标的相对位姿检测精度明显优于单个AprilTag标签位姿检测精度。
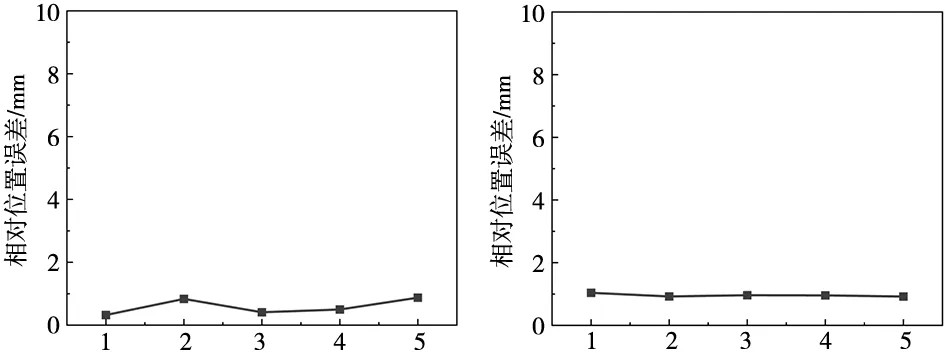
(a) 正12面体x轴上相对位置 (b) 正12面体y轴上相对位置

(c) 正12面体z轴上相对位置
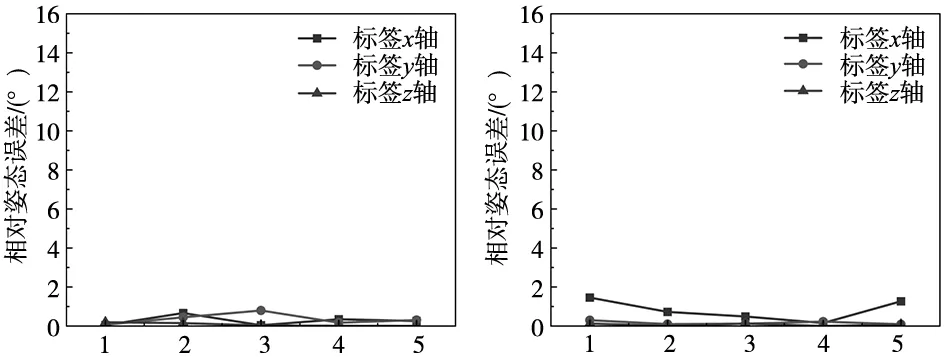
(a) 正12面体x轴上相对姿态 (b) 正12面体y轴上相对姿态
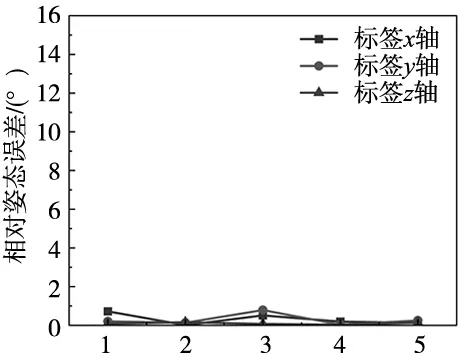
(c) 正12面体z轴上相对姿态
将正十二面体AprilTag靶标检测出来的相对位姿误差求取相应的均值,计算结果如表3所示。从表中可以看出,正十二面体AprilTag靶标在3个轴方向上的相对位置误差都在0.7 mm之内,相对姿态误差均在0.5°之内。与30×30 mm尺寸的单个AprilTag标签相比较,其相对位置误差减少了约83.6%,同时在3个轴向上的相对姿态误差分别减少了约95.2%、94.6%、89.1%。

表3 正十二面体AprilTag靶标平均相对位姿误差
综上所述,通过以上实验结果验证了本文提出的正十二面体AprilTag靶标的位姿检测精度相较于单AprilTag标签位姿识别精度有显著提升,能够较好地适用于多机器人系统的定位。
4 结论
本文针对多机器人的全局定位系统展开研究,提出设计了一种基于Apriltag标签和正多面体的正十二面体AprilTag靶标,并通过视觉传感器检测该靶标的相对空间位姿。该靶标装置既扩展了检测视角范围,又进一步地提升了空间位姿定位精度。本文通过搭建实验平台进行了正十二面体AprilTag靶标的检测精度,实验结果表明,本文提出的正十二面体AprilTag靶标的相对位姿检测精度明显优于单个AprilTag标签位姿检测精度。当采用相同尺寸的AprilTag标签时,相对位置误差降低了约83.6%,同时在3个轴向上的相对姿态误差分别减少了约95.2%、94.6%、89.1%。从而证明了本文提出的正十二面体AprilTag靶标能够较好地应用于多机器人系统中。