非理想通信环境下主动配电网柔性负荷建模与优化控制方法
2023-11-28徐重酉王明月刘天元姚家煊宋晓阳
徐重酉,王明月,刘天元,姚家煊,宋晓阳
(1. 国网浙江省电力有限公司宁波供电公司,浙江 宁波 315000;2. 上海交通大学 电气工程系,上海 200240)
0 引言
随着新能源技术与信息技术的深入结合,出现了一种新的能源利用体系,美国未来学家Jeremy Rifkin 于2011 年在《第三次工业革命》一书中将这种新型能源利用体系命名为“能源互联网(Energy Internet)”[1]。能源互联网将能源技术与云计算、大数据等先进的互联网技术结合起来,依靠信息系统与物理系统的深度融合,可以实现分布式能源的高效使用与多能源荷的协调互动,是能源系统发展的高阶形态。目前的电力系统也正在朝着能源互联网的目标进行建设与升级。
然而,实现信息系统与物理系统之间的深度融合,需要克服两类系统之间的异构特性带来的阻碍。CPS(信息物理系统)就是研究信息系统与物理系统一体化设计、分析、协作的课题。NSF(美国国家科学基金会)首次提出CPS 的概念,并自2006 年起大量资助关于CPS 的研究项目[2]。CPS 将一个控制系统的计算进程与物理进程统一起来,是集成了计算、通信与控制过程的下一代智能系统。CPS 赋予了物理系统以计算功能、通信功能、精准控制功能、远程协作功能和自治功能,从而使物理系统可以更优地实现自身的运行目标[3]。
电力系统是世界上规模最大、最复杂的人工制造系统,作为支撑国民经济命脉的重要工程领域,也较早地开展了电力系统自动化的研究。电力系统已经拥有了一个较为成熟的信息系统,例如已经可以实现覆盖广阔地域与重要节点的实时监视控制与远动通信,其已具备构建完善CPS 的重要基础。然而,电力系统的信息子系统对物理子系统在运行可靠性或控制稳定性等方面的影响仍然是亟待研究的课题。为此,需要将电力系统的信息系统与物理系统进行融合建模与分析,例如使用信息流与能量流融合模型、混合系统模型等方法。其中,混合系统模型可以准确地描述电力系统中物理子系统的连续过程与信息子系统的离散过程,并可以同时考虑物理子系统的运行机理与信息子系统的控制逻辑[4]。混合系统模型对于电力CPS 的物理子系统与信息子系统的联合建模、分析与控制具有重要的应用价值。文献[5]基于将命题逻辑转化为混合整数线性不等式的关键思想与混合整数二次规划的求解技术,提出了混合逻辑动态系统的分析框架。
ADN(主动配电网)作为近年来新兴的智能电网形式,在传统配电网的基础上引入了CPS 的控制特性。其中,通过调控柔性负荷的用电规律实现电网控制是新型能源ADN 中的重要问题[6-8]。文献[9]结合实际场景,阐述了在新型电力系统中建设专业负荷管理系统的技术要求,政策需求与软、硬件研究方向,提出负荷侧资源柔性调控的方式,对柔性负荷参与电网友好互动具有一定的参考意义。文献[10]考虑风电预测的不确定性,提出日前-日内-实时多时间尺度上的源荷协调调度模型,实现了计及风电出力不确定性的柔性负荷控制策略。文献[11]提出长短周期结合的优化校正方法,实现了系统内有功、无功电源与柔性负荷的协调优化。
现有研究提出的优化控制策略通常基于理想通信环境的假设[12],即ADN的控制指令与量测数据在发送端与接收端不存在时间差异。在非理想通信环境下,由通信节点故障、信道阻塞、服务器受到网络攻击等事件可能引起长时间、大规模的数据丢包、信息时延、通信中断等事故,现有的研究工作对非理想通信环境的考虑较为欠缺,对通信扰动因素的分析不够全面。文献[13]仅分析了通信时延对协同控制的影响,并未考虑节点通信故障等实际情况。文献[14]仅讨论了非理想通信环境对算法收敛性的影响,并未讨论该环境下的优化方法。文献[15]提出了一种基于一致性变量信息交互的多源分布式协同调控策略,并未对长时间尺度通信故障情景进行讨论。文献[16-17]使用微分方程描述了连续时间下考虑时滞的电力系统模型,用于分析通信时延对于电力系统小扰动稳定性的影响,其中求解平衡点特征值的方程为复杂的超越方程。然而,实际控制场景中,控制中心发送给被控设备的控制信号为离散的时间序列;并且,从连续时间的角度考虑每个设备动态的微分方程并不适用于含有大量设备的系统级优化控制指令的求解;此外,从优化控制的角度,不同时间电力系统运行点之间的差异较大,用于小扰动稳定性分析的方法并不适用于优化控制方法的分析。因此,研究者更多地采用文献[13-15]类似的方法,从离散时间与混合系统的角度,将考虑非理想通信环境下的电力系统优化模型转化为混合整数规划问题进行求解。
为实现非理想通信环境下ADN的柔性负荷优化控制,本文提出一种考虑信息时延的混合逻辑建模与动态优化控制方法。首先,在非理想通信环境下建立柔性负荷混合系统控制模型,引入信息时延参量改进状态转移矩阵;然后,根据时延状态转移矩阵,提出考虑信息时延的柔性负荷的混合逻辑建模;最后,建立非理想通信环境下柔性分布式负荷的ADN控制优化方法,并通过算例仿真验证该方法的有效性。
1 基于混合系统模型的柔性负荷
1.1 ADN的柔性负荷
馈线中功率较大、活动规律且输出功能具备可累积性特点的负荷,如空调、制冷机等,适合接受配电网的主动控制。典型场景如冷库中的制冷装置,制冷设备的单机功率约为100~400 kW,多台制冷设备同时运行,维持冷库内的温度在一定的可控范围内。
含有柔性负荷的ADN 馈线系统如图1 所示,其中DG1—DG5 为分布式电源,N1—N9 为配电网络节点,Parea1、Parea2、Parea3分别为馈线输送至区域1、2、3的功率,在3个协同控制区域中分别包含一个柔性负荷。

图1 含有柔性负荷的ADN馈线系统Fig.1 ADN feeder system with flexible loads
在外界温度等扰动因素的影响下,各负荷难以在短时间内在停机与满负荷状态中快速切换。图1中,如果3台制冷机同时停机或同时满功率运转,可能导致馈线交换功率大幅度波动。这些现象不仅偏离全局优化获得的优化目标,也违背了ADN减少外界来电的宗旨。
在进行DG(分布式电源)的区域协调控制时,通过将满足可控条件的柔性负荷纳入考虑,能够改善区域及馈线功率分布,实现稳定馈线功率、优化负荷运行、降低整体功耗的目标。
ADN 的负荷控制可分为两种模式,如图2 所示。当馈线系统处于正常状态下,各协调控制区域的电源功率满足该区域内负荷需求的总和,此种模式简称为正常运行状态。在此模式下,馈线入口的交换功率及各区域入口交换功率维持在最优运行点附近,各区域协调控制器的优化目标为:

图2 ADN的负荷控制Fig.2 Load control of ADN
1)负荷耗能最小。
2)区域内分布式电源维持本区域出口功率稳定。
当馈线系统内产生较大功率缺额,如光伏、风电等受气象条件影响的分布式电源输出大幅减少时,馈线上各区域入口功率与最优值之间存在较大偏差,此时可以通过调节负荷来减少馈线交换功率偏差,此种模式简称为功率缺额状态。此状态下所有柔性负荷运行需要降低最大瞬时功率,平抑波动。该模式下的优化目标为:馈线功率偏差在目标值附近保持稳定。剩余分布式电源按馈线交换功率偏差执行控制,平抑负荷变化造成的馈线交换功率波动。
1.2 非理想通信环境中柔性负荷的混合系统模型及控制
1.2.1 柔性负荷控制模型
在非理想通信环境中,n个柔性负荷的离散动态模型可用以下状态方程(包含预测方程与输出方程)表示。
预测方程为:
输出方程为:
式中:t为离散模型中的时段编号,取正整数;一个时段的长度(即时间间隔)为Δt,本文默认Δt=1 s;向量x(t)=(x1(t),x2(t),…,xn(t))T为反映t时段n个柔性负荷功能输出的状态变量,例如对于受系统控制的冷库负荷,则其代表冷库内的温度;向量u(t)=(u1(t),u2(t),…,un(t))T为t时段对n个柔性负荷发出的控制变量,其中un(t)∈U={un1,un2,…,uni},表示对柔性负荷发出的控制变量在i个有限的控制状态内取值;矩阵A是规模为n×n的对角矩阵,为状态变量前的系数矩阵,其取值与柔性负荷种类有关;矩阵B2是规模为n×n的对角矩阵,为控制变量前的系数矩阵,其取值与柔性负荷种类有关;向量B1(t)=(B11(t),B12(t),…,B1n(t))T是在动态模型中考虑外界扰动后增加的项,其与状态变量x(t)同量纲;变量y(t)为t时段柔性负荷控制系统的输出变量,在本文中表示n个柔性负荷消耗的总功率;向量D=(d1,d2,…,dn)表示n个柔性负荷处于运行状态时各自消耗的功率;K为状态变量的预测时段数,M为通信系统中控制信号从决策中心下发到就地柔性负荷的延迟时段数,则预测一次跨越的时间为KΔt,控制信号的时延为MΔt。
根据对控制变量u(t)的定义可知,在一个时段长度Δt中,n个柔性负荷中的每个都有i种运行状态,所有的柔性负荷共有j=in种运行方式,则可设u(t)=(u1(t),u2(t),…,un(t))T=um,m∈{1,2,…,j}。之后,建立式(3)所描述的对应关系,分别对柔性负荷的j种运行方式配置取值位于集合{0,1}中的逻辑变量δm(t),组成逻辑变量列向量δ(t)=(δ1(t),δ2(t),…,δm(t),…,δj(t))T,m∈{1,2,…,j},δm(t)∈{0,1}。
式(3)中“↔”代表两两对应关系。列向量δ(t)代表t时段对所有柔性负荷运行方式的选择状况,且每一时段只能选择j种运行方式中的一种。当所有柔性负荷取第m种运行方式,则对应的逻辑变量δm(t)=1,有等价关系δm(t)=1⇔u(t)=um,此时其他逻辑变量均置为0,则有以下约束:
将式(4)用矩阵形式表达,并对等式约束进行松弛,则有以下约束:
用逻辑变量列向量δ(t)替代柔性负荷控制变量u(t),改写状态方程中的输出方程,设输出变量y(t)仍表示t时段n个柔性负荷消耗的总功率,则向量D需要从描述n个柔性负荷在运行时分别消耗的功率转变为描述n个柔性负荷在各种运行方式下消耗的总功率。假设n个柔性负荷在第m种运行方式下消耗的总功率为Pm,则根据上文的分析与定义,式(6)成立。
将所有柔性负荷分别在j种运行方式下消耗的总功率列为j维横向量D1=(P1,P2,…,Pm,…,Pj),输出方程可以改写为:
用逻辑变量列向量δ(t)替代柔性负荷控制变量u(t),改写状态方程中的预测方程,则矩阵B2需要从描述n个柔性负荷各自在开启时对状态变量x(t)的作用转变为描述n个柔性负荷在各种运行方式下对状态变量x(t)的作用。用逻辑变量列向量δ(t)改写后的预测方程为:
矩阵B21为n×j维矩阵,用于描述n个柔性负荷在j种运行方式下分别对状态变量x(t)的作用,则根据上文的分析与定义,式(9)成立。
预测方程可以改写为:
至此,状态方程中的柔性负荷控制变量u(t)及其相关的系数矩阵已全部被逻辑变量列向量δ(t)与改写后的系数矩阵替代。
另外,考虑状态变量x(t)本身的上下限约束,有以下约束式成立:
式中:n维列向量为状态变量x(t)的下限值向量,其各元素分别表示对应状态变量分量x1(t),x2(t),…,xn(t)可以取到的最小值;n维列向量为状态变量x(t)的上限值向量,其各元素分别表示对应状态变量分量x1(t),x2(t),…,xn(t)可以取到的最大值。
根据以上分析过程,可以列写柔性负荷控制模型需要满足的所有约束式:
1.2.2 柔性负荷预测控制
各控制周期内的优化目标为:
式中:J为柔性负荷预测控制模型的目标函数;T为一个控制周期内包含的时段数量;Q1、Q2、Q3为权重系数;yf为期望n个柔性负荷消耗的总功率;向量xf为期望的n个柔性负荷的状态变量;向量δf为期望的n个柔性负荷的运行方式逻辑变量。
在正常情况下,n个柔性负荷独立运行,并且通常期望各个柔性负荷在控制周期T内尽量少地消耗电能量,因此,设置δf=δmin,此处列向量δmin为n个柔性负荷消耗总功率达下限值时对应运行方式的逻辑变量,此时相应地有yf=Pmin=0,其中Pmin为n个柔性负荷消耗的总功率的下限值。
若某时段馈线功率缺额值ΔP(t)不大于预设的门槛值Pswitch,则认为此时的情形处于正常状态;若某时段馈线功率缺额ΔP(t)大于预设的门槛值Pswitch,则认为此时系统进入了功率缺额状态,柔性负荷预测控制的目标应转变为协助其他分布式发电机减少馈线功率与目标功率值的偏差,同时尽可能减小馈线功率的波动。此时,可以设置优化控制目标中的其中满足使最小,其含义可以解释为:在柔性负荷的各个运行方式中选择柔性负荷消耗总功率使其功率调节量之和最接近馈线功率缺额的运行方式作为控制目标,使得柔性负荷在保证自身功能的基础上尽量为减小馈线功率偏差与馈线功率波动做出贡献。
基于上述两种情形下的控制目标,可以按照图3所示的流程实施最终的柔性负荷预测控制策略。

图3 ADN柔性负荷预测控制流程Fig.3 The forecasting and control flow of flexible load in ADN
1.2.3 非理想通信环境对柔性负荷预测的影响
在非理想通信环境中,控制指令的发送与接收之间存在信息时延,以图4所示时间轴场景为例进行说明[18]。设在T=20Δt的控制周期中,向受控设备发送两次控制指令。在理想通信环境下,控制过程按照10Δt等距进行,控制指令发送后应立刻被受控设备接收,并被受控设备执行。而在非理想通信环境下,首个控制指令U1从t=0 出发,于t=11Δt到达受控设备并被执行;第二个控制指令U2从t=4Δt离开控制器,于t=13Δt到达受控设备,但直到t=20Δt才执行控制。可以看到,在非理想通信环境下,控制指令的执行可能受到影响。
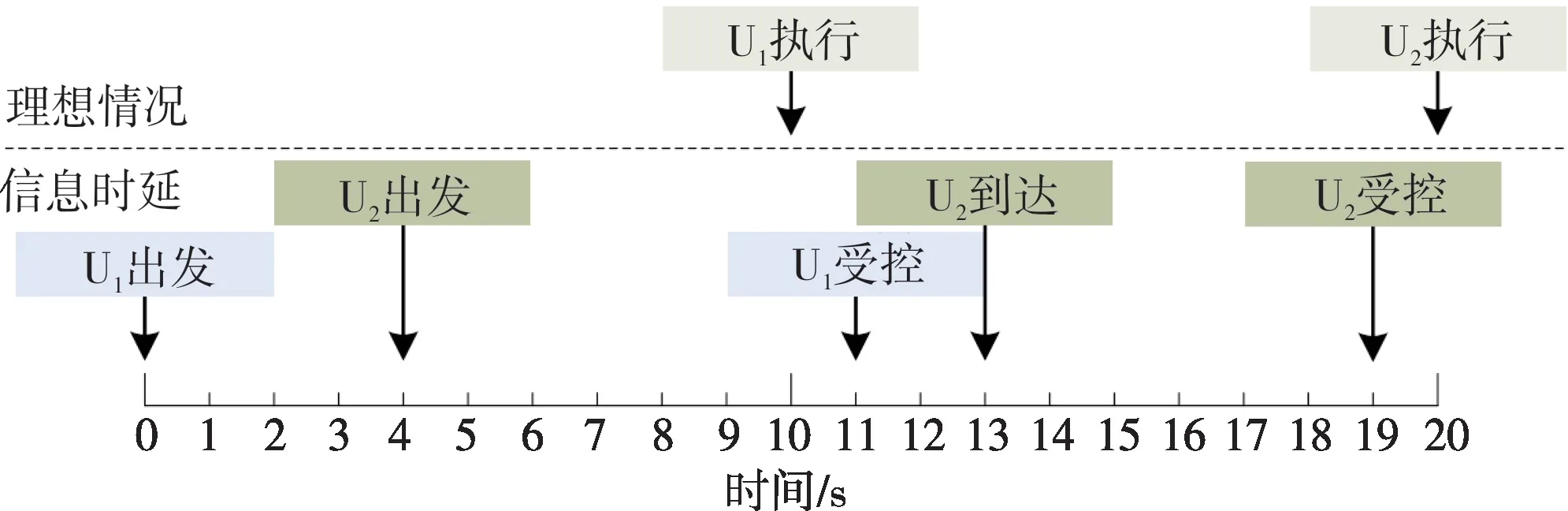
图4 非理想通信环境中控制指令执行情况Fig.4 Execution of control instructions in non-ideal communication environments
在负荷预测与优化问题中,设非理想通信环境中存在的信息延迟时段数为M,若在优化过程中未考虑时延,则预测时序及实际受控时序将如图5所示产生错位,进而使得控制效果低于预期。
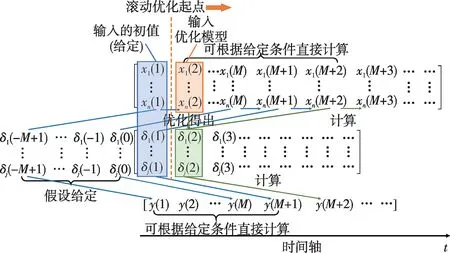
图5 未考虑信息时延的优化方法Fig.5 Optimization method without information delay neglected
2 算例研究
以图1所示的馈线系统为例,仿真前文所述的非理想通信环境中柔性负荷混合系统模型及在ADN控制中的应用。该算例包含3个由ADN控制的区域,区域1含有2台分布式电源(DG1、DG2)及柔性负荷1,区域2 含有1 台分布式电源(DG3)及柔性负荷2,区域3 含有2 台分布式电源(DG4、DG5)及柔性负荷3。节点N1、N3、N5、N7、N9处接有常规负荷,馈线系统的参数如表1所示。全局能量控制计算的全局馈线最优目标如表2 所示,根据最优目标测量交换功率和区域交换功率,调节柔性负荷进行馈线功率控制。表2 中,PDG1、PDG2、PDG3、PDG4、PDG5分别为各分布式电源发出的功率。

表2 全局最优目标功率Table 2 The global optimal target power
本例中柔性负荷的物理意义为中型冷库负荷,通过压缩机实现的制冷装置将冷库内的温度控制在恒温范围内。柔性负荷按预测及输出方程建模后,可得到表3所示的冷库温度模型。表3中:W为表示温度变化惯性的系数;C1为外部温度对库内温度的扰动系数;C2为制冷设备对库内温度的影响系数;Pcom为柔性负荷的额定耗能功率;Tc为负荷所在区域的期望受控温度区间。
(4)哈拉湖周围湖泊融区域。Na+,Mg2+与呈显著性相关,pH与有显著性相关,可能与碳酸盐的溶解有关。矿化度与有较高的相关性,说明矿化度主要受以上几种离子的影响较明显,见表5。

表3 柔性负荷温度模型参数Table 3 The temperature model parameters of flexible loads
取仿真时间间隔Δt=1 s,仿真计算的计算总时长Ta=200 s,每个控制周期内的时段数T=10,预测时段数K=1,延迟时段数M=4。柔性负荷控制变量un(t)所属集合U={0,1},un(t)=0表示t时段控制柔性负荷n关闭,un(t)=1 表示t时段控制柔性负荷n开启。所有柔性负荷共有23=8 种运行方式:u1=(0,0,0),u2=(0,0,1),u3=(0,1,0),u4=(1,0,0),u5=(1,1,0),u6=(1,0,1),u7=(0,1,1),u8=(1,1,1)。可以计算得到8维横向量D1=(0,234,122,370,492,604,356,726) kW。
为体现本文所提计及非理想通信环境的柔性负荷优化控制模型的适用性,在ADN功率正常状态与功率缺额状态两种场景下,分别应用第1章所建立的优化控制模型进行仿真。为了凸显本文所提方法的优势,两种场景下均设置了优化时视通信环境为理想情况的对比算例,计算了相同参数设置下考虑非理想通信环境前后的柔性负荷优化控制结果曲线及各类指标。
仿真验证评估采用的主要指标包括柔性负荷的开启时长、冷库温度标准差、总功率标准差和总能耗。所有算例验证基于MATLAB R2021a 平台,所有测试运算均在CPU主频为3.20 GHz、内存为16 GB的Windows 11 64位计算机上进行。
2.1 正常状态下的柔性负荷控制
正常状态下,期望各柔性负荷在满足各种约束、接近控制目标的条件下尽可能少消耗电能量。图6展示了正常状态下柔性负荷优化控制结果。

图6 正常状态下柔性负荷优化控制结果Fig.6 The optimal control results of flexible loads under normal conditions
正常状态下的仿真评估指标如表4所示,该结果表明,相较于视通信环境为理想情况进行优化控制时,考虑时延后有以下变化:

表4 正常状态下考虑时延优化前后的仿真评估指标对比Table 4 Comparison of simulation evaluation metrics before and after considering time delay optimization under normal conditions
1)负荷温度的变化更加平稳,负荷温度的标准差明显降低,说明负荷的优化控制模型考虑时延后有助于提升受控状态变量的稳定性。
2)所有柔性负荷的能耗降低,说明负荷的优化控制模型考虑时延后提升了负荷控制的灵活性,有助于节能。
3)柔性负荷的控制更加灵活,导致所有柔性负荷使用的总功率的标准差有所上升。
2.2 功率缺额状态下的柔性负荷控制
功率缺额情况下,期望各柔性负荷在满足各种约束、接近温度控制目标的条件下,其所使用的总功率可以尽可能弥补馈线处产生的功率缺额。假设此时因分布式电源出力突变,馈线处产生的功率缺额亟待补足,需要所有柔性负荷使用的功率在某段时间内稳定在600 kW,图7 展示了功率缺额状态下柔性负荷优化控制结果。
功率缺额状态下的仿真评估指标如表5 所示。功率缺额状态下,相较于视通信环境为理想情况进行优化控制时,考虑时延后,负荷的优化控制仍能够更好地维持冷库温度,但由于总功率不足,负荷的总体出力需要长时间维持在较高水平。因此,考虑时延的优化方法不再能够降低总体系统能耗。
2.3 考虑非理想通信环境的ADN柔性负荷优化控制方法的实际应用
本文第1 章中针对考虑非理想通信环境的ADN柔性负荷优化控制方法的核心算法部分进行了阐述。在此基础上,本节对本文所提方法如何在ADN控制中实际应用进行说明。
1)控制中心确定控制的时间间隔、一个控制时段的总时长、控制时段内滚动优化的时间窗口等时间参数。
2)控制中心从数据库中调取柔性负荷(本文中为冷库负荷)的注册信息,如负荷数量、温度限值、额定功率、系数矩阵等,并计算柔性负荷所有的运行方式及对应的功率。
3)控制中心根据气象数据和历史负荷信息,预测下一控制时段内的分布式能源出力和常规负荷功率,计算馈线功率缺额以确定此时段内ADN处于正常状态或功率缺额状态,结合馈线功率控制目标与用户期望的温度值,确定此时段最终的柔性负荷的控制目标。
4)控制中心根据历史控制时段内统计到的通信异常数据预测下一控制时段内的平均延迟时段数M,以上一控制时段结束时的柔性负荷状态作为初值,采用第1章中的方法进行滚动优化,取滚动优化时间窗口内第一个时段的控制指令发送至柔性负荷的控制终端,继续滚动优化直至得到控制时段内最后一个时段的控制指令。
5)回到步骤3),继续进行下一控制时段的柔性负荷优化控制。
3 结语
本文在非理想通信环境中提出了一种考虑信息时延的混合系统建模与控制方法。通过冷库制冷负荷算例进行仿真验证,该方法在功率正常状态下可有效地改进受控温度的扰动,降低系统整体能耗,实现了ADN中柔性负荷的控制优化。
