甘肃临夏机场二维微动剖面探测
2023-11-28刘白云陈九辉刘云全孙艳萍
刘白云 陈九辉 刘云全 赵 莉 孙艳萍
1 中国地震局地质研究所地震动力学国家重点实验室,北京市华严里甲1号,100029 2 甘肃省地震局,兰州市东岗西路450号,730000 3 甘肃省敦煌文物保护研究中心,兰州市张苏滩800号,730000 4 新疆建雅道路建设工程有限公司,新疆维吾尔自治区阿克苏地区沙雅县人民北路,842200 5 中国铁塔股份有限公司甘肃省分公司,兰州市火星街1201号,730050
浅层结构层速度和层厚的差异,尤其松散沉积层和基岩之间的速度差异及沉积层厚度,是决定场地响应的主要因素。微动探测方法为覆盖层厚度、地层及隐伏断层等浅层探测提供了新途径[1]。微动是指地球时刻发生的微小振动,在任意时间和地点都能观测到[2]。微动探测是通过反演布设的观测台阵采集的数据来获得被检测体下方介质的剪切波速度结构。本文利用微动探测技术,勘测拟建的临夏机场建设区覆盖层厚度、地层结构与分层,探明是否存在隐伏断层等不良地质体,为后续工程施工建设提供依据。
1 区域地质构造
拟建机场位于临夏盆地,在宏观地貌上属于青藏高原东北边缘向黄土高原东北边缘过渡的构造波及区,青藏高原的阶段性隆升对盆地的形成、演化及地貌结构具有重要影响[3]。研究区内部由北秦岭断裂、雷积山断裂和马衔山围成挤压型坳陷盆地[4],盆地内部分布有大夏河和洮河。盆地以临夏市为界分为东盆地与西盆地,西盆地第四纪沉积物厚度达千米以上,受青藏高原隆升影响,地层变形显著;与西盆地相比,东盆地沉积厚度明显较薄,受构造运动影响也较小,故东盆地内部地层稳定且产状近水平,其顶部仅有约200 m厚的黄土覆盖堆积[5]。
2 原理与方法
2.1 频散曲线的提取
微动是由体波(P、S波)和面波(Rayleigh、Love波)共同组成的复杂振动[6],其中面波的能量占绝大部分。尽管微动信号的振动幅度与频率不一定完全符合某一规律,但在一定时间范围内具有平稳特征,可利用时间与空间上的平稳随机过程来证明。微动探测以平稳随机过程的数据为基础提取相速度频散曲线,然后反演地下介质结构的剪切波速度,进而反推介质结构。
假定微动信号符合平稳随机过程,其波谱的样本函数X(t,ξ(r))可表示为:
X[t,ξ(r)]=exp(iωt+iKξ)d[Z(ω,K)]T
(1)
式中,ω=2πf为角频率,K=(kr1,kr2)为波数矢量,Z为正交随机过程,t为时间。
对于微动台阵2个测量点观测到的波形记录,其自相关函数S为:
S(t,r1,r2-r1)=E[X*(t,r1)·X(t,r2)]
(2)
式中,E为期望,*为共轭,r为观测半径。
空间自相关系数在频率域内表示为:
(3)

2.2 S波速度结构反演
利用实测观测台阵的相速度频散曲线进行反演,得到台阵中心点下方被探测结构体1D的剪切波速度结构。获得每个台阵实测相速度频散曲线后,利用式(4)将每个台阵中心点vr-f曲线转换成视S波速度曲线VX-H[7],再对中心点之间的视S波速度值进行内插与光滑等处理,最终获得整个探测剖面的视S波速度图像:
(4)
式中,vr为瑞利波相速度,ti为周期。
3 数据采集及处理
3.1 观测系统
微动探测形式有圆形台阵和直线台阵等多种类型的观测系统[8]。实际工程中,根据项目探测的需求及场地条件的不同,需要布设不同形式的观测台阵。在布设圆形台阵时,常采用多重圆嵌套的形式来布设测量点,圆形台阵的探测深度可达到台阵半径的3~5倍以上。多项实验表明,三重及以上圆形台阵更容易探测到地层分界面附近的波速突变特征[9]。
本文微动探测测量位置位于拟建的甘肃省临夏机场航站楼所在地,地表第四系覆盖层巨厚, 测区内地势平坦。考虑到此次探测既要探测覆盖层厚度与地层结构分布,还要探测在测区是否存在隐伏断层,故在航站楼南面和北面分别布设AA′和BB′测线进行对比验证,长度分别为440 m和380 m(图1)。其中,沿AA′测线布设的是三重圆形台阵观测系统,共由3个圆形台阵(A1、A2、A3)组成,每个圆形台阵由中心测点和内、中、外3圈共10个测量点组成,具体结构见(图2(a))。完成1个圆形台阵观测数据采集后,将所有观测仪器挪动至下一个圆形台阵,依次循环。BB′测线观测场地选择在机场所在冉坪村的水泥路面上,布设为直线型观测系统,测量点间距为8 m(图2(b)),分2段探测,单条测线长度为190 m,在第1个观测段完成数据采集后,按标号顺序将仪器平移到下一个观测段继续测量。

图1 微动测线布设Fig.1 Layout of microtremor survey lines
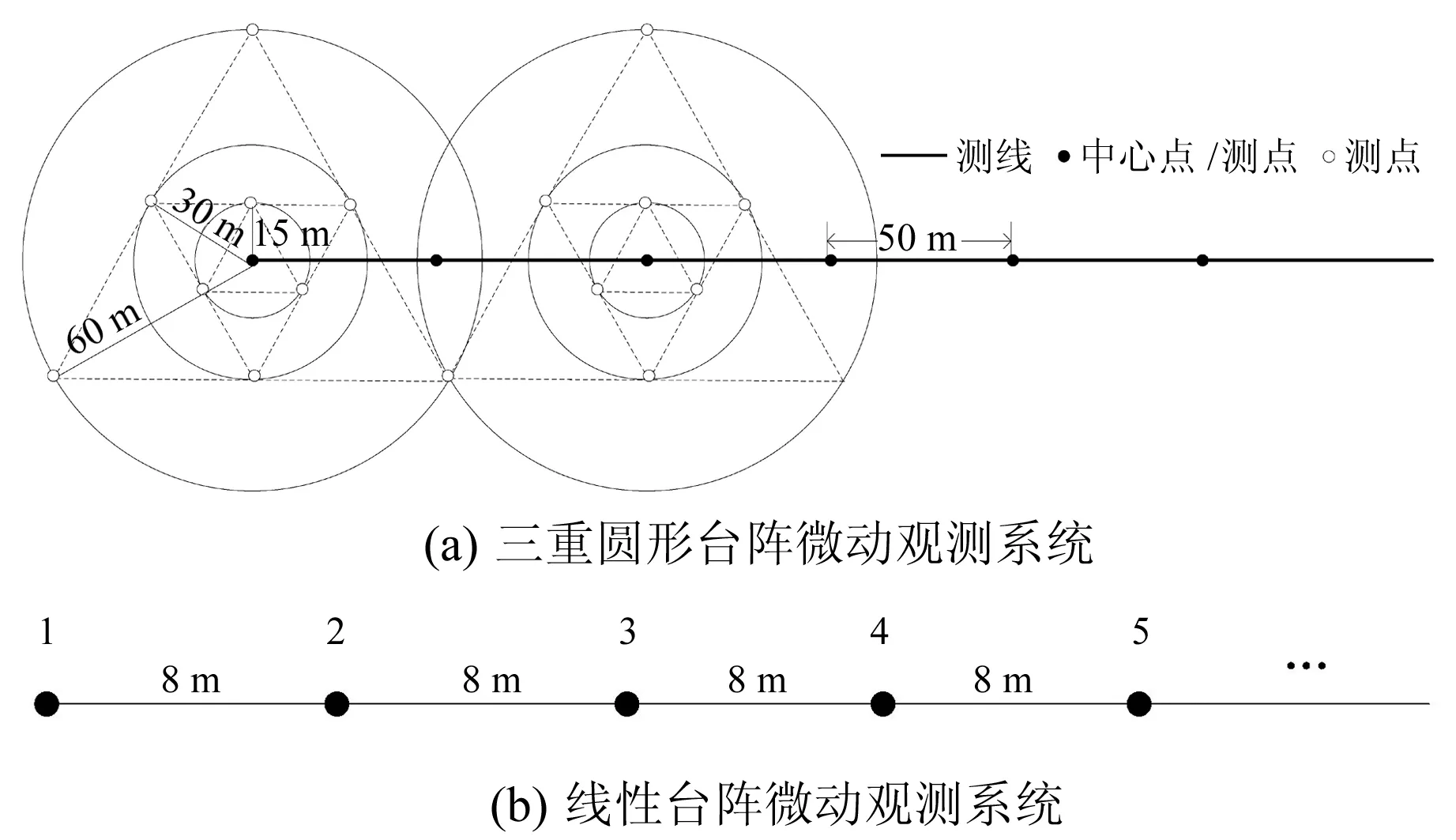
图2 微动观测系统布设Fig.2 Layout of microtremor observation arrays
3.2 仪器及参数
本文数据采集仪为EPS便携式微功耗宽频带地震仪,具有传递函数稳定、体积小、功耗低等特点,其时间校正及各套仪器间的时间同步均由记录仪内置授时系统自动完成。仪器技术参数如下:周期为5 s,通道数为3,A/D转换为24位,采样频率为100 Hz,时间稳定度为5×10-7s,标定方式为方波标定,频带范围为1~200 Hz。
3.3 数据采集
为确保各测点地理位置坐标的准确性,每次正式测量前,先使用高精度GPS测量仪RTK测定微动仪位置,然后架设仪器,过程中轻拿轻放仪器,架设完成后对仪器工作状态进行检查,确保供电、零位与授时等一切正常,之后观测人员与车辆撤离至远场位置。筛选数据时,选择所有仪器均稳定工作的时段的波形记录。圆形台阵的数据采集时长平均约为1 h(图3),线性台阵数据采集时长平均约为25 min(图4)。
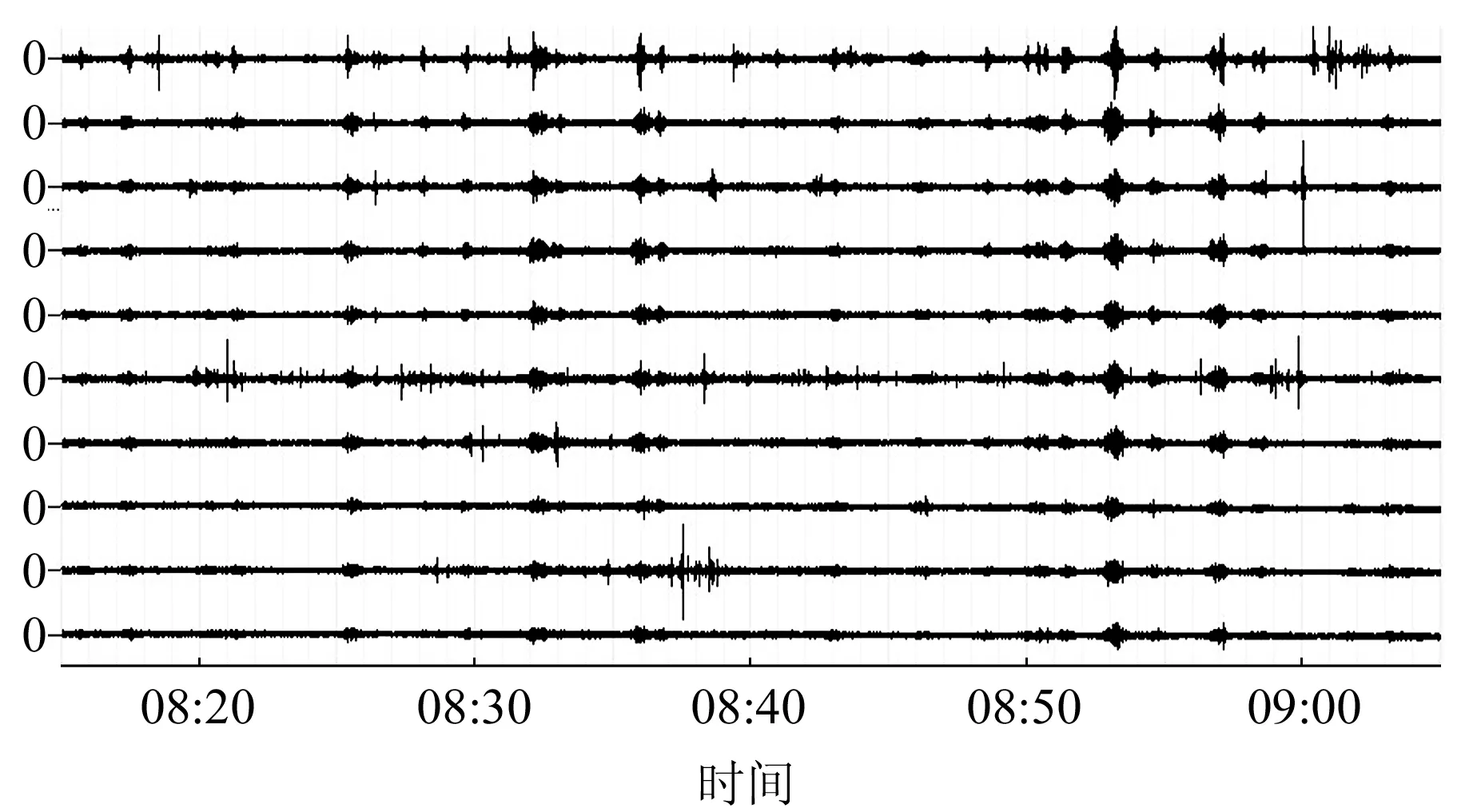
图3 圆形台阵观波形记录Fig.3 Waveform records of circle observation arrays

图4 线性台阵波形记录Fig.4 Waveform records of linear observation arrays
3.4 微动数据处理
对于获得的平稳微动数据记录,先按设定时长将其分成不同的小段,分别计算傅里叶谱和功率谱。在此基础上,计算各台阵所有测量点两两组合的空间自相关系数,并取方位平均,拟合第一类零阶Bessel函数。给定频率值f,计算与其对应的相速度vr,可获得AA′测线3个圆形台阵(图5)和BB′测线(图6)对应的相速度频散曲线。然后将上述相速度频散曲线vr-f转换成视S波速度随深度H变化的曲线VX-H,再进行各台阵视S波速度相互插值与光滑计算,最终获得整个测量剖面的2D视S波速度结构剖面(图7)。
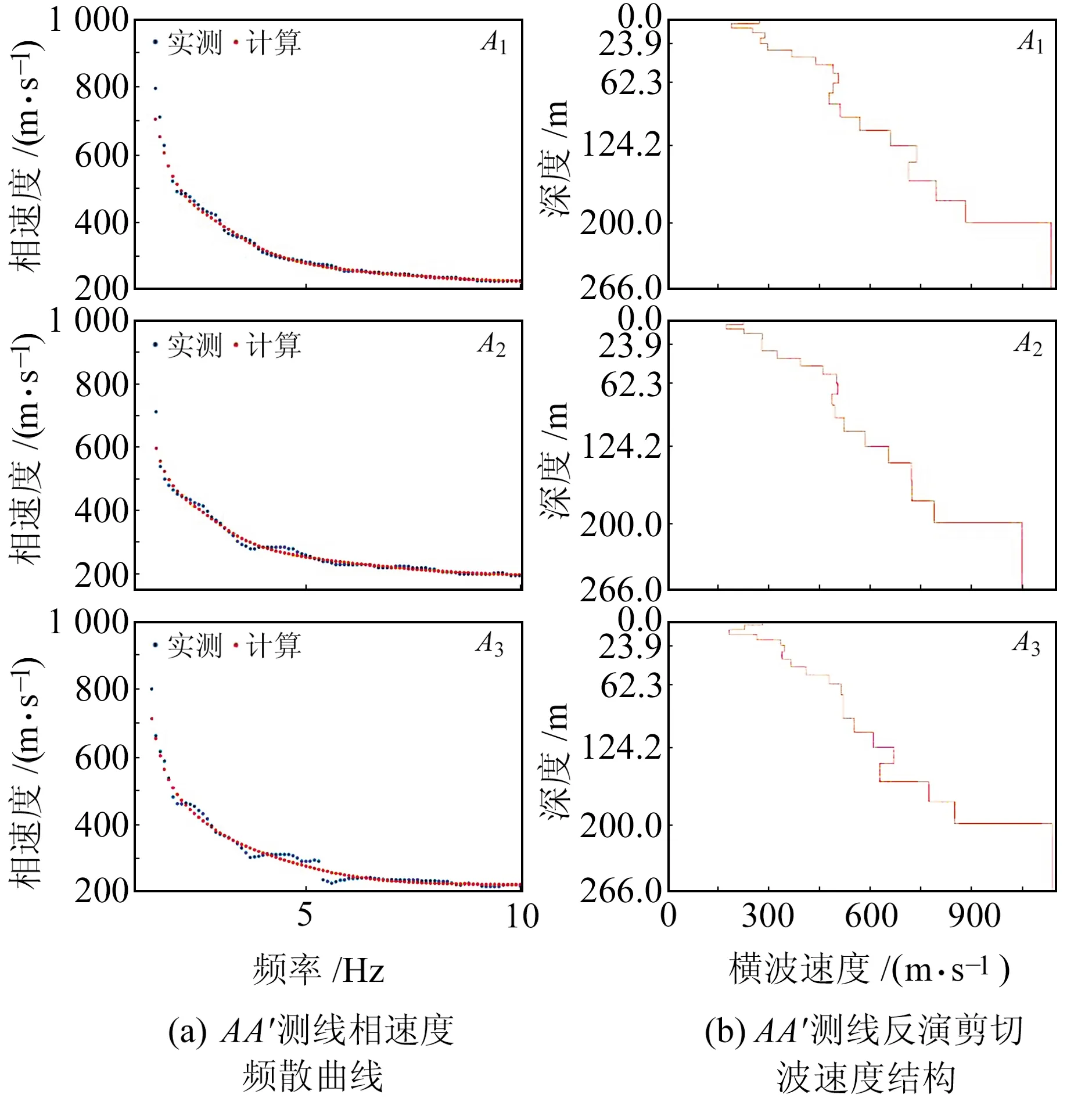
图5 AA′测线相速度频散曲线与反演剪切波速度结构Fig.5 Phase velocity dispersion curves and the inverted shear wave velocity structure of AA′ survey line
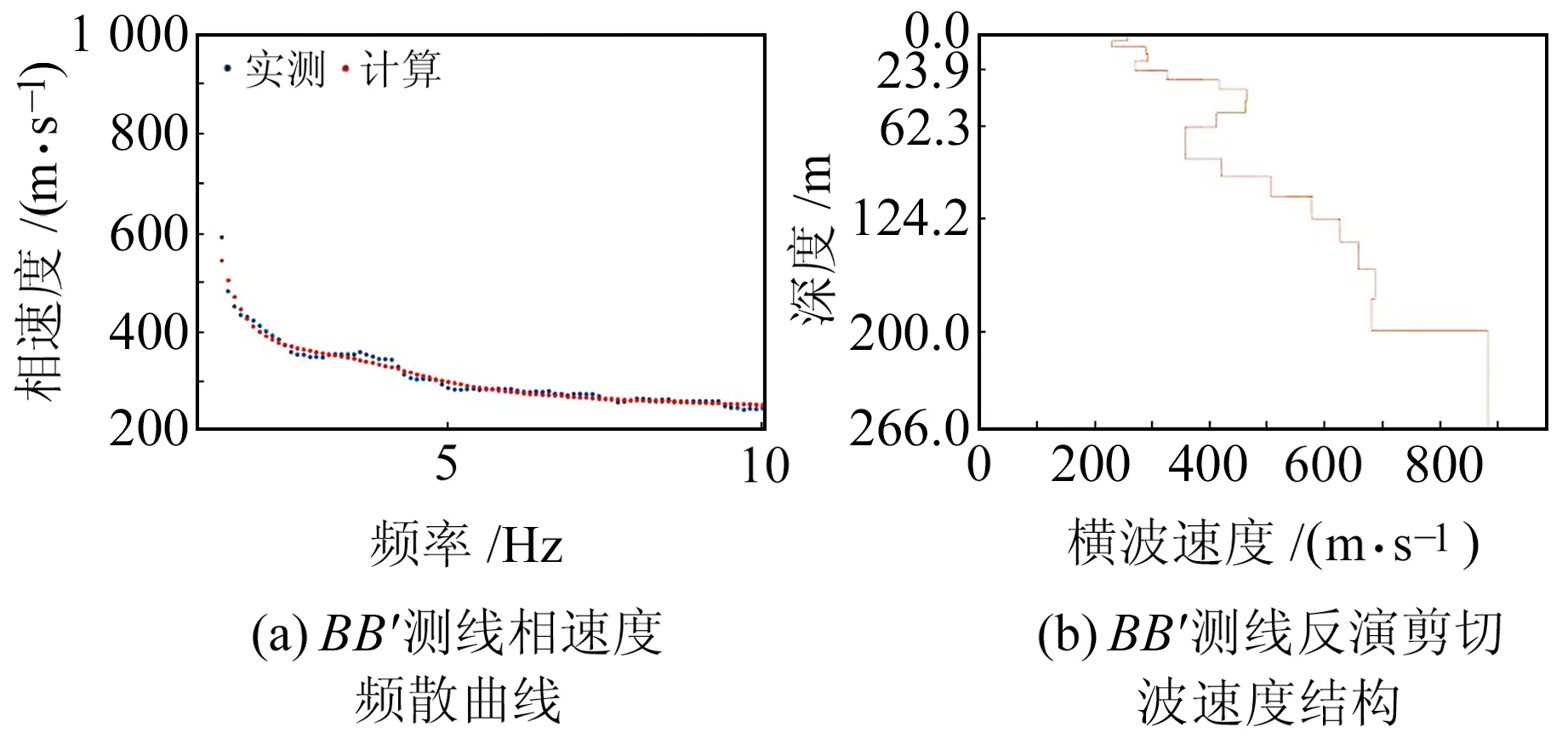
图6 BB′测线相速度频散曲线与反演剪切波速度结构Fig.6 Phase velocity dispersion curve and the inverted shear wave velocity structure of BB′ survey line
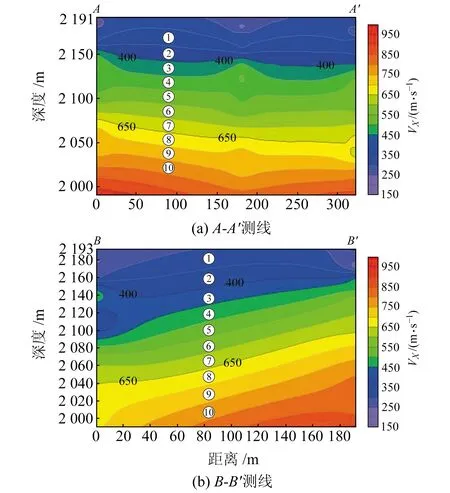
图7 二维微动视S波速度剖面Fig.7 2D microtremor apparent S-wave velocity profile
4 讨 论
2D视S波速度(VX)剖面的解译原则为从已知的钻孔等基础资料推断反演剖面所代表的构造信息,解释过程中还需结合区域或者近场的地质、地球物理、地球化学等方面的信息。基岩面与覆盖层交界面及不同地质时代地层间分界面等的岩性差异较大,是区分速度结构的分界面,可利用微动测深法较好地确定其埋深分布。对比本次圆形和线性台阵观测系统分别反演获得的二维视S波速度剖面可以看出,两者反映的地层分层基本一致,均可细分为10个速度层位,各层层状起伏小,呈近水平向或向一个方向倾斜。该测区可参考标定的地勘资料仅有甘肃铁道综合工程勘察院有限公司根据地质调查、区域地质资料及该单位参与附近相关的房建所得的勘察成果,认为机场建设区黄土厚度约为160 m,之下为卵石等碎石类土,下伏有新近系上新统泥岩、夹砂岩。以获得的视S波速度结构剖面作为本次2D微动剖面追踪、解释相应岩性层的依据。在此基础上,考虑临夏机场建设区的速度背景条件、速度梯度变化过程及图像形态等因素,综合分析VX剖面特征,对VX剖面中的地层岩性分层给出定性与定量解释。本次VX实测剖面(AA′)特征如下:
1)黄土状粉土层:位于①~⑥层间,VX小于600 m/s。通过该视S波速度剖面推测,该区第四系黄土覆盖层厚约120 m,是施工建设的关键层位,其灾害效应与其厚度和结构密切相关。各层层状除在测线中部位置的第④层上、下界面有一定程度的上拱与下凹外,其余各层层状起伏小、近水平。相近地勘资料表明,该层为Ⅱ级普通土,灰黄、淡黄色,土质均匀,含有虫孔及钙化菌丝,稍湿,稍密,大规模分布于拟建机场的黄土塬上。
2)卵石、基岩强风化层:位于剖面⑦~⑨层间,VX介于600~750 m/s,埋深约120~170 m。与地勘资料对应,该层位代表的卵石层为青灰色,颗粒呈浑圆状,周围砂土充填,稍湿,中密-密实,Ⅲ级硬土。
对比2个2D视S波速度结构剖面发现,在200 m深度内,AA′视S波速度剖面代表的岩层产状整体呈水平状,BB′视S波速度剖面代表的岩层产状整体向南倾斜。2个剖面距离相近,但反演结果有一定的差别,可能是因为AA′视S波速度剖面是由圆形台阵观测系统采集数据反演的,这种形式的台阵频散图谱能量集中度高且测线长度相对于线性台阵观测系统较长,能够实现大深度与射线交叉覆盖好的微动观测数据采集,反演得到的视S波速度结构剖面分辨率也较高。而BB′视S波速度剖面是由线性台阵观测系统采集数据反演得到的,其在测线两端射线覆盖率低,反演获得的视S波速度剖面长度只有测线总长度的一半。此外,整个视S波速度剖面由各测点结果经内插光滑得到,导致线性台阵观测系统与圆形台阵观测系统探测到的结果有一定差异。
从AA′视S波速度剖面中还可以看出,40~90 m深度之间地层有局部起伏变化,这可能代表着该层存在部分褶皱隆起或凹陷。2个剖面反映的地层结构均无明显错动,说明场区应无隐伏断层等不良地质体的存在。
5 结 语
利用2D微动小台阵探测技术实测拟建的临夏机场,获得其航站楼建设区2条2D视S波速度结构剖面,结合已有的宏观地质与钻孔地勘等资料综合解释该场地第四系覆盖层与基岩面埋深、地层结构分层及延伸形态。结果表明,地层在横向与纵向上无明显错断,由此判断建设区无隐伏断层通过。
