三相笼型异步电动机反接制动特性的Matlab 仿真
2023-11-27张代润
张代润
(四川大学电气工程学院,成都 610065)
三相异步电动机在应用时经常会涉及其起动、调速与制动特性,在需要频繁起停、变速和正反转的电动汽车、电力机车、地铁、起重机、电梯等应用场合其制动性能尤为重要。三相笼型异步电动机的制动方法主要有:能耗制动、回馈制动和反接制动;反接制动的特点是制动迅速、设备简单,适合在紧急情况下采用。本文着重仿真分析不同负载条件下的三相笼型异步电动机的反接制动特性,为掌握异步电动机的制动特性提供了一种形象化、直观化的手段。
1 三相笼型异步电动机的Matlab 模型
三相笼型异步电动机反接制动特性的仿真模型如图1 所示,其主电路[1-3]由三相交流电压源、三相配电变压器、匹配并联电容器和三相笼型异步电动机构成。

图1 三相笼型异步电动机反接制动仿真模型
三相交流电压源的参数为400 V、50 Hz。
三相配电变压器型号为S9—30/10,是一台三相自冷油浸式双绕铜导线电力变压器[4],可带三相和单相负载,其主要参数为:额定容量30 kVA,额定电压10 kV/0.4 kV,额定频率50 Hz,联结组Yyn0,阻抗电压4%,空载电流2.1%,空载损耗0.13kW,短路损耗0.60kW。由此,可计算出折算到变压器低压侧的短路电阻rk为0.107 Ω 和短路电抗xk为0.184 Ω(即Lk=0.585 7 mH);励磁电阻rm为52.409 Ω 和励磁电抗xm为203.355 Ω。显然,励磁阻抗远比短路阻抗大得多,故配电压器建模时仅考虑其短路阻抗对异步电动机起动的影响。
匹配并联电容器主要解决电压源内阻与异步电动机等效阻抗在Matlab 仿真中的方程计算问题,其容量取为三相30 Var,对应电容值是很小的,即只对方程求解的算法有效;而对于主电路的无功功率补偿,则只有象征意义。如果理想电压源(即无内阻)为三相异步电动机供电,则无需并联电容器。
三相笼型异步电动机型号为Y132M-4,是中心高为132 mm、中机座、4 极的Y 系列(IP44)小型三相异步电动机[4],其主要参数:额定功率7.5 kW,额定频率50 Hz,额定转速1 440 rpm,额定电压380 V,额定电流15.4 A,定子绕组Y 接,额定效率87%,额定功率因数0.85,起动电流倍数7.0,起动转矩倍数2.2,最大转矩倍数2.3,转动惯量0.029 6 kg·m2。由此,可计算出三相笼型异步电动机的T 等效电路参数:定子绕组电阻r1为0.706 4Ω(取r1=r2')、定子绕组漏电抗x1为2.02Ω(取x1=0.5xk);转子绕组电阻折算值r2'为0.7064 Ω、转子绕组漏电抗折算值x2'为2.02 Ω(取x2'=0.5xk);励磁电抗xm为3.797Ω,励磁电阻rm忽略不计;即有L1=L2'=6.4298mH、Lm=12.086 2 mH。
在图1 中可以仿真恒转矩负载和负载转矩随转速一次方、平方、三次方变化及其组合的负载工况。
2 转矩随转速一次方变化仿真
三相笼型异步电动机带转矩随转速一次方变化负载(即TL=10×(1×10-3×n)N·m)起动和反接制动的仿真波形如图2 所示,电动机的起动时间小于0.3 s;常闭三相断路器(Breaker 1)在0.4 s 时断开,而常开三相断路器(Breaker 2)在0.4 s 时闭合,开始电动机的反接制动(图1)。由图2(a)可知,在电动机起动期间,电容器线电压、电动机线电压相对于电源的线电压略有下降,但下降幅度并不大,在完成起动后,则三者非常接近;在反接制动开始时,电容器线电压、电动机线电压都有超过4 000 V 的冲击电压。由图2(a)可知,反接制动时,电动机线电压已与电容器线电压、电源线电压反相,说明实现了a 相、b相电压的交换。由图2(b)可知,起动时的最大定子电流约为起动后的2.5 倍,而起动时的最大转子电流则是起动后的7 倍,且起动完成后转子电流的频率非常低;在反接制动时的最大定子电流约为稳态的3.3 倍,而反接制动时的最大转子电流则是稳态的13 倍左右。由图2(c)可知,在起动初期电动机的电磁转矩在-15~+70 N·m 剧烈波动,对应转速也有明显波动,说明这时起动并不平稳;在0.1 s 后,电磁转矩平稳增加,逐步达到最大转矩约45 N·m;在0.2 s后,当转速非常接近同步转速1 500 rpm 时,电磁转矩甚至下降到小于负载转矩的状况,然后再逐步振荡趋向于负载转矩,在0.3 s 左右完成起动过程;由于负载转矩较小,故完成起动后电动机转速较高。在反接制动时,最大的冲击电磁转矩达到-220 N·m 左右,在约0.56 s 时电动机转速已下降到0 rpm,而在0.8 s时电动机已完成反向起动过程。所以,在电动机反接制动时,当检测到转速接近0 时,一定要及时切断电源以防止电动机的反向起动。
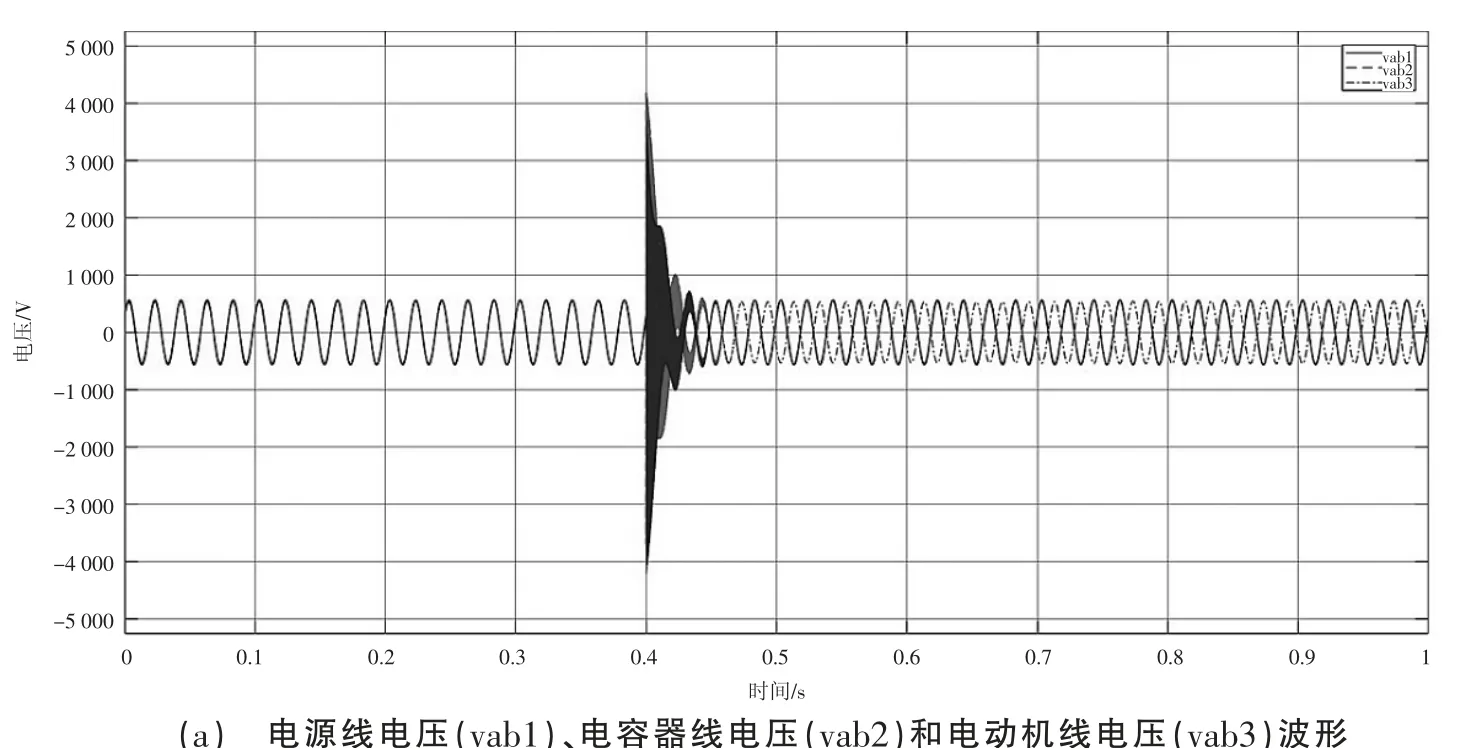
图2 三相笼型异步电动机带转矩随转速一次方变化负载的起动和反接制动仿真曲线
3 转矩随转速一次方和三次方变化仿真
三相笼型异步电动机带转矩随转速一次方和三次方变化负载(即TL=10×{(1×10-3×n)+[1×(10-3×n)3]}N·m)起动和反接制动的仿真波形如图3 所示,电动机的起动时间远小于0.3 s;常闭三相断路器(Breaker 1)在0.4 s 时断开,而常开三相断路器(Breaker 2)在0.4 s 时闭合,开始电动机的反接制动(图1)。由图3(a)可知,在反接制动开始时,电容器线电压、电动机线电压有略低于4 000 V 的冲击电压。由图3(b)可知,起动时的最大定子电流约为起动后的1.2 倍左右,而起动时的最大转子电流则是起动后的3 倍左右,且起动完成后转子电流的频率较低(但高于图2);在反接制动时的最大定子电流约为稳态的3 倍左右,而反接制动时的最大转子电流则是稳态的5 倍左右。由图3(c)可知,在起动初期电动机的电磁转矩在-15~+70 N·m 剧烈波动,对应转速也有明显波动,说明这时起动并不平稳;在0.1 s 后,电磁转矩平稳增加,逐步达到最大转矩约50 N·m;在0.2 s 后,当转速逐步稳定在1 400 rpm 左右(稳定转矩约为40 N·m,明显大于图2),在0.3 s 前完成起动过程。在反接制动时,最大的冲击电磁转矩达到-220 N·m 左右,在约0.53 s 时电动机转速已下降到0 rpm,而在0.8 s 时电动机已完成反向起动过程。

图3 三相笼型异步电动机带转矩随转速一次方和三次方变化负载的起动及反接制动仿真曲线
4 结论
将Matlab 的Simulink 仿真技术应用于三相笼型异步电动机起动特性和反接制动特性的电机学教学过程中,通过由三相交流电压源、三相配电变压器、匹配并联电容器和三相笼型异步电动机构成的主电路可以仿真恒转矩负载和负载转矩随转速一次方、平方、三次方变化及其组合的负载工况;展示了负载转矩随转速一次方变化及负载转矩随转速一次方和三次方变化的仿真实例,生动呈现了其电压、电流、转矩、转速的波形变化趋势,并可比较电动机不同负载条件下的运行波形细节。本文提供了一种异步电机理论形象化、直观化的教学手段,有利于调动学生的学习积极性,有利于促进电机学教学质量的提高。
