变电站一键顺控改造中的关键技术研究
2023-11-25闫存恒张海宾潘振东郝国青
闫存恒,张海宾,潘振东,秦 彬,陈 琳,郝国青
(国网北京市电力公司检修分公司,北京 丰台 100073)
0 引言
随着变电站的大规模投入和电气设备操作复杂度的提升,运维人员的工作量与日剧增,由人工持票,在设备就地或监控系统中逐项操作并检查设备状态的传统倒闸操作方式,已不能满足当前电网对变电运维安全性和时效性的要求。变电站一键顺控技术,可将烦琐、复杂、易误操作的传统倒闸操作转变为操作项目软件预制、操作任务模块化搭建、设备状态自动判别、防误连锁智能校验、操作过程自动执行的一键顺控模式[1],在减少运维人员重复性工作量,降低误操作风险,提升倒闸操作效率等方面效果明显[2],受到越来越多网省公司的重视。
目前大量常规变电站由于投入运行较早,并不具备一键顺控实现条件,须要对其进行改造。而变电站一键顺控改造工程中,较为凸显的技术难点主要集中在隔离开关的分合闸位置“双确认”、开关柜手车及二次空开的电动化改造、压板和空开的监视与管理技术这几大方面,本文针对这些技术难点,依据实际改造工程中的实践经验,设计了相应的优化系统,探索了相关解决方案,对今后常规变电站升级一键顺控系统有一定的参考价值和指导意义。
1 隔离开关的分合闸位置“双确认”技术
根据Q/GDW 1799.1-2013《国家电网公司 电力电力安全工作规程变电部分》第5.3.6.6条规定,设备操作前后位置检查应以设备各项实际位置为准,无法看到实际位置时,应通过间接方法,且至少有2个非同样原理或非同源的指示同时发生对应变化,所有已确定指示均同时发生对应变化,才能判定分合闸是否到位[3-4],即须要实现设备位置的“双确认”。断路器的位置双确认,可通过“位置遥信 +遥测数据(即三相电压或三相电流)”来实现[5],一键顺控改造相对较简单。而隔离开关的位置双确认,在常规变电站倒闸操作中往往采用“位置遥信 +就地查看”的方式,显然“就地查看”不符合一键顺控的基本要求,因此在刀闸位置遥信作为主要判据的基础上,还须增加一种辅助判据,来实现刀闸位置双确认,满足一键顺控的改造需求。针对这一问题,本文提出了一种基于磁感应装置的隔离开关分合闸位置“双确认”系统。
该“双确认”系统,由电动机构内的微动开关提供刀闸位置遥信指示作为主要判据,并通过在刀闸转臂和静止件上加装磁感应装置,为测控装置提供刀闸位置的辅助判据,使一键顺控操作中刀闸位置满足“双确认”的要求。磁感应装置如图1所示,由永磁体和磁感应传感器组成,永磁体一般安装在隔离开关的拐臂或转动杆上,磁感应传感器则每相2个,通过安装附件分别安装在隔离开关的分、合位置处,用来进行分合闸到位检测。安装附件应根据刀闸的外型结构进行可定制化设计,以满足不同刀闸的状态检测需求。磁感应传感器内部有磁簧管、信号回路等,两片磁簧片密封在玻璃管内,中间留有一小段空隙,当永磁体接近时,磁场增大到一定强度,磁簧片受磁力吸引而接触,使信号回路导通,发出相应的刀闸位置信号传送至接收装置;当永磁体远离时,磁力消失,磁簧片返回至原来的位置,信号回路断开,相应的刀闸位置状态发生改变。
加装磁感应装置后的隔离开关分合闸位置“双确认”一键顺控系统如图2所示,包括顺控主机、智能防误主机、I区数据通信网关机、测控装置、设置于隔离开关内用于刀闸位置遥信指示的微动开关,以及磁感应装置确认套件。该系统的运行流程为:运维人员在顺控主机上拟出操作任务,自动产生一键顺控操作票,通过站控层将指令模块发送给智能防误主机;智能防误主机收到操作票指令后,形成防误校核序列,用于后续步骤中隔离开关刀闸位置变化的校核。
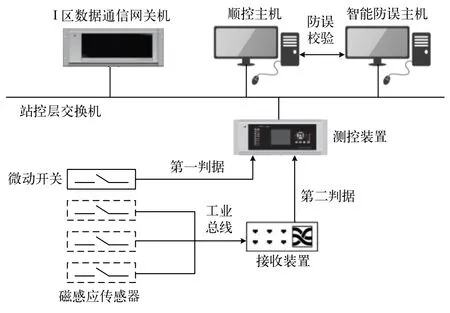
图2 一键顺控系统
刀闸位置变化的校核分以下步骤进行:
(1)隔离开关位置发生变化时,原有的微动开关通过触碰辅助开关接点,改变位置遥信状态,从而判断隔离开关此时的状态,该判断结果作为主要判据上送至测控装置。
(2)隔离开关分闸(合闸)到位后,刀闸拐臂上的永磁体远离合位(分位)点上的磁感应传感器,靠近分位(合位)点上的磁感应传感器,分位(合位)点上的磁簧片受磁力吸引而接触,使信号回路中的常开触点闭合,发出刀闸由合变分(由分变合)的信号,发送给接收装置,并作为辅助判据由接收装置传输给测控装置。
(3)测控装置根据接收到的主要判据及辅助判据,对隔离开关分合位置进行判断,并通过电脑钥匙向顺控主机反馈隔离开关的刀闸位置,顺控主机与智能防误主机进行防误校验,通过后可执行下一步操作。
综上,通过加装磁感应装置,为测控装置判断隔离开关位置增加了一项辅助判据,满足刀闸位置“双确认”要求,是常规变电站一键顺控改造的关键技术和有力保障。
2 开关柜手车及二次空开的电动化改造
目前国内变电站的10 kV开关柜小车及二次空开的程序化操作应用较少,尤其对于常规变电站,操作10 kV开关柜时,停电时先远方遥控拉开断路器,再由运维人员就地将手车拉至试验位置;送电时先由运维人员就地将手车推至工作位置,再远方遥控合上断路器。相关二次空开,例如储能电源、控制电源、电热电源的拉合,同样高度依赖于运维人员就地操作,这是常规变电站一键顺控改造的一大技术难点。因此,对10 kV开关柜小车及二次空开进行电动化改造,是变电站一键顺控改造中的关键一步。
对于常规变电站10 kV开关柜手车,可采用在手车下方加装电动托盘,同时增加相应的电气和机械联锁功能的方式,实现电动化改造[6]。改造后的电动托盘传动原理图如图3所示,原有的小车开关传动件只有一个普通螺丝滑杆,通过人工手持摇把插入摇孔中对小车进行摇入摇出操作,改造后增加了驱动电机、变速器、齿轮传动和链条传动,操作时传动链条在驱动电机作用下发生滑动,带动齿轮发生转动,齿轮紧固在螺丝滑杆上,使螺丝滑杆发生转动,从而实现手车的电动摇入摇出。变速器可以使手车在摇入或摇出即将到位时进行减速,防止撞击对手车造成机械损伤,相当于“驱动电机 + 变速器 + 传动链条 + 传动齿轮”的组合代替了“人工 +摇把”的组合。
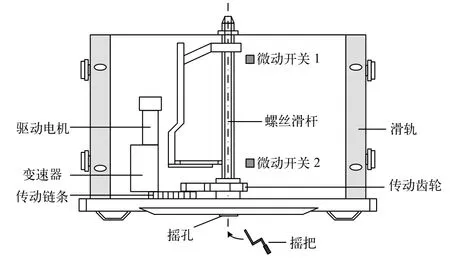
图3 电动托盘传动原理图
由于远程操作不需要就地查看手车开关的实际位置,因此同样须要增加一种对手车位置的辅助判据。根据开关柜的结构特点,最适合使用双微动开关,图3中的微动开关1即为用于手车位置遥信的原微动开关,微动开关2则是改造加装的第二个微动开关,其与原微动开关非同源,当手车摇入到位后,转轴上的凸起部分会将微动开关压下,当手车摇出时,微动开关不受压力而弹起。微动开关辅助节点由常闭转为常开,手车位置信号发生改变,形成手车位置的辅助判据。
对于常规变电站的二次空开,可对其安装电动操作附件,并将其接入智能终端,实现变电站二次空开的远程操作。执行10 kV开关柜倒闸操作任务时,运维人员在顺控主机上拟出操作任务,系统自动调出相应的操作指令,并发送至电动托盘控制单元,控制单元自动对该指令进行防误闭锁检测,检测通过后,控制电动托盘对手车进行摇入或摇出操作。摇入或摇出到位后,借助双微动开关辅助接点,对手车位置进行“双确认”,确认完毕后,电动托盘自动停止工作。
开关柜手车及二次空开进行电动化改造后具备以下优点:
(1)电动化操作配合一键顺控系统,无须运维人员到站即可远程操作,全程不需要接触一次设备,解放人力的同时,更加保障了人员的安全。
(2)误操作风险低,顺控主机与智能防误主机对防误闭锁逻辑进行自动校验,不需要进行防误模拟操作,全程无人员介入,发生误操作的风险相比人工倒闸操作小得多。
(3)实效性有保证,收到调度令后,操作人员只须要在顺控主机上拟出操作任务并执行,全程自动化操作,比人工倒闸操作快[7]。
3 压板和空开的监视与管理技术
当前,随着一键顺控技术在全国变电站得到大力推广、变电运维一体化受到各网省公司重视的背景下,变电站信号集中上送、统筹管理成为必然发展趋势,变电站二次设备融入一键顺控的需求逐渐凸显。而要解决这一需求,首要任务就是通过技术改造实现远程集中监视和管理变电站的压板和空开。智能变电站或新投运的变电站可采用操作系统软压板代替常规硬压板来实现的方法实现,而对于已经运行常规变电站,如何在不动二次接线、不停电的情况下实现对压板和空开的监视与管理,已经成为一键顺控技术改造中极受关注的问题[8]。针对这一问题,本文提出了一种二次设备监视和管理的设计方案,其网络结构如图4所示,包含为位置传感器、状态采集器、控制器以及监视机。位置传感器安装在每个压板或空开上,采用位置感应原理,当位置发生变化时,其传感器发出状态改变的信号,同一排传感器以手拉手方式串联。每块保护屏安装一个状态采集器,用于接收本保护屏上所有传感器的状态信号。所有保护屏上的状态采集器通过工业总线将信号传至控制器,控制器引出2路以太网出口,一路与当地智能防误主机相连,实现压板与空开的防误管理,另一路通过电力专用网络发送给监控机,实现运维班对压板和空开的监视与管理。
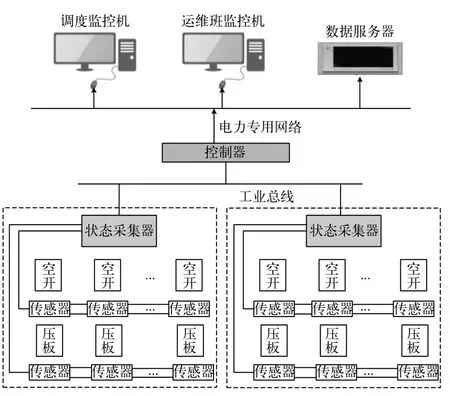
图4 压板和空开的监视及管理系统图
4 结束语
本文着眼于常规变电站一键顺控改造过程中较为普遍且棘手的技术难点,给出了相应的设计方案,有针对性地解决了改造工程中的关键问题。通过本方案对北京市某220 kV变电站进行一键顺控改造,改造前人工停220 kV某一间隔须要的时间大约为45 min,改造后使用一键顺控系统操作,时间缩短至10 min,运维人员全程不须要接触一次设备,安全性、时效性均得到极大提高。