无人机智能巡视系统在变电站巡检中的应用
2023-11-25吴俊杰
吴俊杰
(国网福建省电力有限公司厦门供电公司,福建 厦门 361006)
1 应用背景
随着各地区电网规模的不断扩大,变电站数量逐年增加,变电站运维人员的巡检作业工作时间也随之增长。在各变电运维站人员数量不变的大背景下,如何利用智能化手段,以机器巡检代替人工巡检,提升变电站巡检效率,成为亟待解决的问题。
目前,变电站巡检通常以人工巡检为主,高清视频和机器人巡检为辅来开展站内联合巡检,但变电站内设施布局紧凑、复杂,特别是高电压等级的AIS变电站,站内设备类型多,变电站内避雷针、结构支架、绝缘子串、母线、半高层构架等高处设备距离地面巡视通道远,地面人工、高清视频和机器人采用仰视的视角进行巡检,巡检难度大,且常存在巡检盲区,地面巡视手段无法及时发现高处设备的发热、设备破损等设备隐患和缺陷。通过引入无人机视角进行变电站巡检,从高处视角对变电站高处设备、部件进行“可见光 + 红外”巡检,能有效弥补地面巡视盲区,提升变电站内各巡检点位的覆盖率。
当前,变电站内无人机巡检采用“无人机 + 遥控器”单兵作战的模式进行巡视,整个巡视过程历经无人机充电、无人机放置在起飞点、遥控器下发巡视任务、遥控器观测巡视过程、巡视采集图片回传遥控器、人为回收无人机、人工审核采集图片等过程,整个过程需人工前往巡检变电站后才能开展巡视,且无人机充电、无人机起飞准备、无人机回收、照片审核等流程都需要人工参与,无人机巡检智能化程度低。针无人机现有应用,须研制一套无人机智能巡视系统,具备无人机任务下发、自动巡检、自动充电、自动降落、数据采集传输、图片智能识别等功能,运维人员在站端可完成无人机巡检全流程管控。
2 系统组成
无人机智能巡视系统由无人机、无人机机巢、安全接入模块、交换机、站端巡视主机、智能分析主机等构成。
变电站用无人机通常采用电动型多旋翼无人机,相较之固定翼无人机,多旋翼无人机造价便宜、起降条件低、操作难度小、可靠性高、实用性好,适用于安全性要求高、空间小的场合,但它的尺寸小、起飞重量较小,飞行距离、飞行速度和续航时长较差,适用于距离较短、范围较小的设备巡检,更适合用于变电站巡检场景中。此外,由于变电站内电压等级高,变电站巡检过程中无人机穿梭在带电设备中,因此站内无人机应具备良好抗电磁干扰性能,并且无人机机身、机翼材质最好采用绝缘材料[1]。无人机智能巡检须要通过可见光和红外2类传感器,对设备各巡视点位进行可见光和红外图谱拍照。因此无人机一般须要搭载可见光和红外双镜头,可见光镜头像素最好不低于2 000万,具备远距离变焦能力,红外镜头分辨率应不低于640 × 480,满足精确测温的镜头要求。无人机巡检过程中须悬停在各个观测点5~10 s进行巡检点位拍摄,因此无人机须具备前、后、左、右、上、下6个方向的控制功能和cm级别的定位能力。综合以上特点,变电站内无人机使用微型多旋翼无人机居多,大疆御2、御3以及道通EVO2这几个型号无人机使用的较为广泛[2],如图1所示。

图1 微型多旋翼无人机
为了实现无人机任务全流程智能化执行,须配置一个无人机机巢,用来实现控制无人机自主起降、任务下发、巡视数据传输、无人机自动充电等功能。要实现无人机智能巡检,首先要解决无人机的续航问题。目前一架大疆御2无人机能满足30 min左右的巡检作业,无人机电池须进行充电后再执行下一个巡检任务。无人机的电池是可拆卸式的,电池与无人机为一体,但是无外设的充电口,所以机巢在搭建系统时须加装充电基座,用于无人机返航后对无人机电池进行充电。无人机机巢盖采用敞开式设计,使无人机返航后能与充电基座准确连接,须要实现无人机较精确的归位。无人机主要利用GPS坐标导航飞至固定位置,落在停机坪后,机巢利用伺服电机控制丝杆将无人机归位至停机位的中心位置,无人机归中后,充电基座自动与无人机电池相连接,无人机自动开始充电。无人机机巢布置在室外,应具备IP55的防尘、防水等级,机巢内也应配置空调、除湿装置,如图2所示。
图2 无人机机巢
无人机机巢部署在变电站侧,通过站端安全接入模块及交换机连接站巡视主机。运维人员可通过巡视主机搭载的新一代辅控系统向机巢无人机发送控制、巡视任务指令。无人机自主开展巡视作业过程中,运维人员可在新一代辅控系统任务界面实时查看无人机的巡视进度,每个点位的巡视结果可实时推送上窗,当巡视点位异常时可实时查看,人工进行确认。无人机巡视结束后巡检数据将回传至巡视主机,采集到的图片将推送给智能分析主机进行图片智能分析。可自动识别站内4大类13小类常见类别的设备状态和缺陷,具体如表1所示。无人机智能巡检结果,根据不同类型的缺陷识别率差别比较大,通过整合不同类型缺陷模型,针对不同类型的设备和缺陷图像识别率可达到85%,特别是站内鸟巢、锈蚀、瓷瓶破损等类型缺陷,图像识别率大于90%。
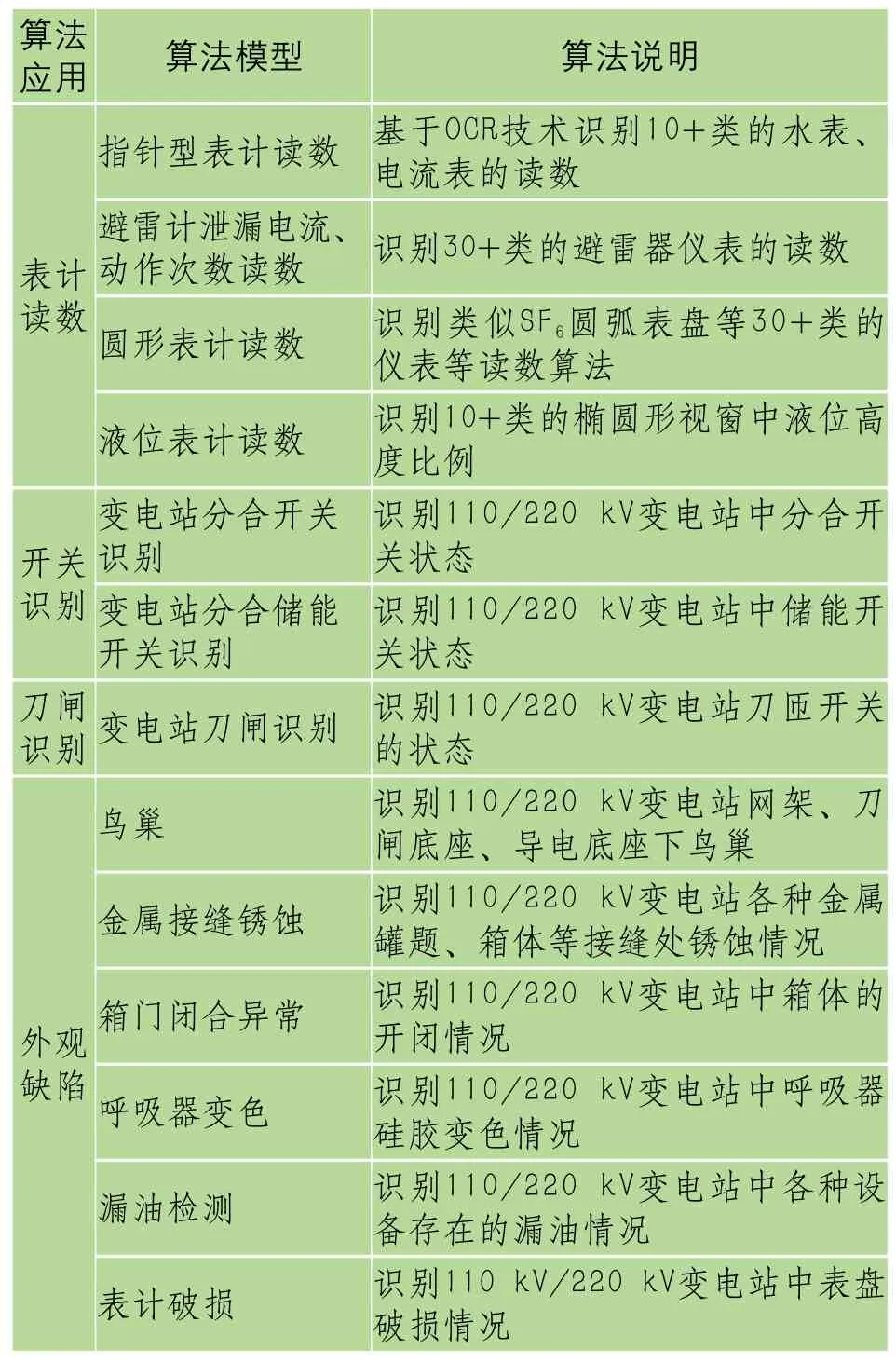
表1 无人机巡检变电站设备及部位
智能分析主机将图片分析结果回传至巡视主机进行数据归档,新一代辅控将自动生成含有巡视点位命名、拍摄图片、缺陷分析结果在内的巡视报告,供运维人员进行审核。
3 航线规划
无人机智能巡视系统应根据变电站设备的布置特点和场地,自主规划巡视航线。航线规划前须对变电站完成激光点云数据采集,建立变电站高精度三维激光点云模型及精细贴图模型。变电站三维点云模型搭建后可利用航线规划软件,综合考虑无人机飞行能力,根据绑定的设备台账规划自主巡视航线。无人机巡视点位涵盖变电站内9类设备,具体涵盖巡视点位如表2所示。

表2 无人机巡检变电站设备及部位
无人机航线规划通常根据高清视频和机器人的巡视盲区进行布置,这类航线以变电站中高处区域的母线、绝缘子、避雷针及门型构架、主变上方平台为巡视重点,无人机巡视点位配置在变电站巡视设备的上方,航线走向平行于巡视通道,拍摄角度以俯视角为主,利用“一点多拍”的思路,可通过拍摄的高清可见光照片,检查设备外观油污、雷击破损、金具缺失等缺陷;通过红外照片进行三相之间的相对温差判别,检查金具、母线等的异常发热缺陷,如图3所示。
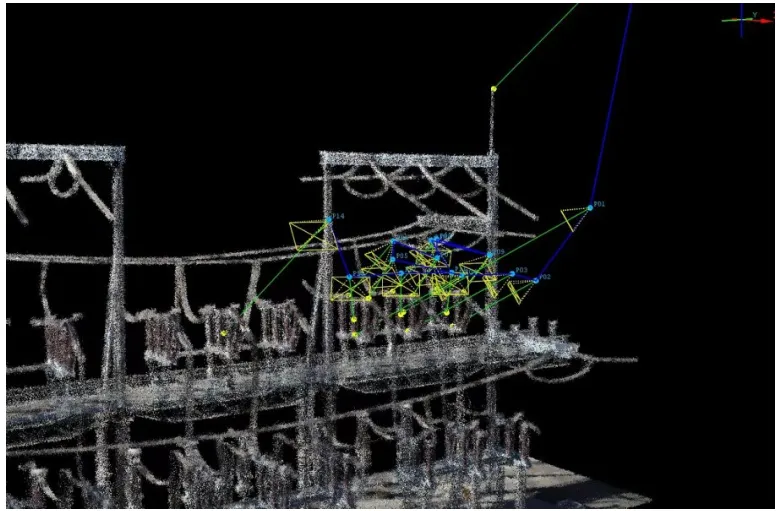
图3 无人机航线规划
4 应用情况
以某220 kV变电站为例,介绍变电站智能巡视系统在变电站巡检中的具体应用情况。该变电站为户外AIS变电站,特殊点在于该变电站220 kV和110 kV电压等级设备均配置有半高层,2个电压等级各间隔的Ⅱ母隔离刀闸都布置在半高层上方,距离地面2层楼高,且其他相关的母线、龙门架、绝缘子等设备距离地面也很远,地面巡检很难进行全面的巡视覆盖,因此该变电站具有引入无人机智能巡视系统进行立体巡检的需求。
该变电站配置一台搭载大疆御2行业进阶版无人机的机巢,针对该变电站设备规模大,设备类型繁杂的情况,该站运维人员针对性地详细规划不同的无人机航线,并做好巡检任务整理,可以方便地进行任务派发,以满足不同类型巡检需求。目前已规划了包括例行巡检、熄灯巡检、专项巡检在内的航线共计有68条,这些航线都经过了飞行测试,具备自主巡检条件。无人机巡检过程中从各设备上方视角对各巡视点位同时开展可见光巡视和红外测温,可以观测地面人工、机器人和高清探头看不到的细节,如可以观测隔离开关触头接触是否良好、各接头、线夹连接是否正常、导线是否存在断股散股等现象。无人机在高空巡检时同步开展红外测温,人工巡检时设备高处测温点位如引线接头、线夹、绝缘子串等在地面拍摄时常常效果不佳,特别是在半高层巡视通道上,而无人机可以悬停在适当的距离
该变电站开展“无人机 + 高清视频 + 机器人”联合巡检,设备巡检时间由全人工巡视的143 min压降至设备巡视的53 min,节约时间90 min。截至2023年7月31日,该作业方式已实行了13个月,通过123次无人机自主巡检任务、103次联合巡检任务共发现包括异常发热、硅胶变色设备渗漏油等缺陷48个。
系统自安装上线以来,运行良好、状态稳定,取得以下成效。
经济效益:该变电站使用无人机智能巡视系统后可以有效提高变电站巡检效率,缩短巡检时间,部分巡检功能能替代人工巡检,具有良好的经济效益。该变电站一年现场设备巡检100次,按巡视时长平均缩短90 min,大约可节省9 000 min,以50元/h计算,使用无人机巡检1年可节省2名工人的巡检费用1.5万元。
社会效益:使用无人机智能巡视系统后可以减少变电站巡检时间,解放出来的人力可以用于其他工作,可提高人员劳动效率,减少工作成本,提高了现场工作安全性、供电可靠性,能够切实保证现场工作安全可靠,提升供电服务质量和公司形象,具有良好的社会效益。
5 结束语
无人机可按照点云规划线路对站内设备开展高空巡视,能够有效消除巡视盲区,提高巡视效率。同时将巡检成果整理工作由人工变为智能分析,巡检人力成本大大降低,极大提高了变电站巡检的智能化程度。
