基于三维混合定位的车载水下应急救生装置
2023-11-22杨志龙李亚兵阴鹏宇
杨志龙,李亚兵,阴鹏宇,于 翔
(天津城建大学 计算机与信息工程学院,天津 300384)
0 引 言
众所周知,我国是一个汽车大国。据公安部统计,截至2022年6月底,我国机动车保有量达到4.06亿辆,其中汽车有3.1亿辆,可见我国汽车数量庞大,发生意外事故的可能性也会大大提高[1]。“7.20”河南特大洪涝灾害期间,郑州仅京广快速路北段隧道,就有247辆车拥堵被淹,遇难人数6人。2012年7月21日,北京暴雨如注,这场暴雨导致了全城交通处于瘫痪状态,最后共有37人不幸遇难[2]。2013年8月30日,深圳下了一场大暴雨,一司机经过涵洞时,涵洞中的积水迅速上升,司机受困于车中无法逃脱,最后不幸溺亡[3]。《中国统计年鉴》显示,2017—2019年,中国交通事故年均发生数23.19万次,交通事故年均死亡人数6.3万人,其中汽车涉水事故的死亡率最高。据不完全统计,我国平均每年汽车落水事件达300余起,车内驾乘人员获救者不足10%。这些数据和事件表明,有一款合适且工作性能稳定的水下救生装置是多么的重要,它可以在危急时刻挽救多少人的生命。
根据专家统计和专业人士水下实验,以及汽车涉水后车内获救人员讲述的经验,总结汽车落水造成驾乘人员死亡的主要原因有六种:一是因缺氧而导致的窒息身亡;二是汽车电路断电,水压过大,车门无法打开,无法及时逃生;三是车内没有击碎车玻璃的工具、车玻璃硬度较大难以击碎逃出;四是车玻璃被水压冲击破碎后严重伤人致死;五是汽车坠入水中时产生的冲击直接致人死亡;六是溺水死亡。
针对以上问题,本文提出一种基于三维混合定位的车载水下应急求生装置。本装置功能丰富,可靠性高,极大地提高了受害者的存活概率。
1 系统整体设计
本文设计的基于三维混合定位的车载水下应急救生装置主要由五大模块组成:三维混合定位模块、推力模块、供氧模块、照明模块以及电源模块。
在发生危险时,使用者在汽车头枕支撑杆的一侧,找到一个塑料按键,按下塑料按键后,向上用力将头枕完全拔出,将头枕拿下来后,使用汽车头枕进行破窗;在水中利用推力模块进行运动,推进器采用无刷电机带动螺旋桨作为动力来源;采用人体工学设计让使用者上手舒适;动力大小通过油门拉环调整,采用高品质鱼线材质可以承受较大的拉力,并且可以根据使用者的手掌大小不同调整拉环线的长度,方便使用者调节行进速度,避免不必要的磕碰。具有电源指示功能,一方面在未使用时可以及时充电,避免发生使用时电量不足的情况,另一方面在使用时可以帮助使用者及时了解推进器电源的剩余情况,方便使用者及时思考自身的求救方式。
三维混合定位模块采用Arduino单片机作为主控,利用MPU6050姿态传感器、JSN-SR20-Y1超声波传感器,得到使用者在水下的身体姿态倾斜角度(在水下帮助使用者判断自己是否因为环境因素发生侧翻)、行进方向以及与水下障碍物的距离(帮助使用者及时避开障碍物),并将这些数据展示在TFT显示屏上进行实时更新,使用者可以通过查看数据,及时调整自身的姿态以及逃生方向;电源模块分别给三维混合定位模块和推力模块进行供电。
在遇到氧气不足的情况时,可以使用供氧模块里的便携式吸氧器进行供氧,以免发生缺氧窒息的情况;打开照明模块里的探照灯(P70四核强光灯珠)照射水下,便于使用者观察水下情况,提高使用者的存活概率。系统结构如图1所示。

图1 系统结构
2 系统硬件设计
2.1 主控制器模块
本装置所使用的主控制器为Arduino UNO R3开发板,此开发板起源于意大利,Arduino UNO开发板采用Atmel公司推出的ATMEGA328P芯片作为核心处理器,而ATMEGA328P是高性能、低功耗的AVR 8位微控制器,采用先进的RISC体系架构,具有高耐力非易失性内存段,由此产生的架构可以更加有效地运行程序,运算的速度更快[4],完全可以胜任姿态数据处理等任务。该芯片由1.8~5.5 V的直流电压供电,最低可在-40 ℃的环境下工作,时钟电路采用16 MHz的外部晶振作为时钟源,复位电路采用低电平复位。主控制器模块电路如图2所示。
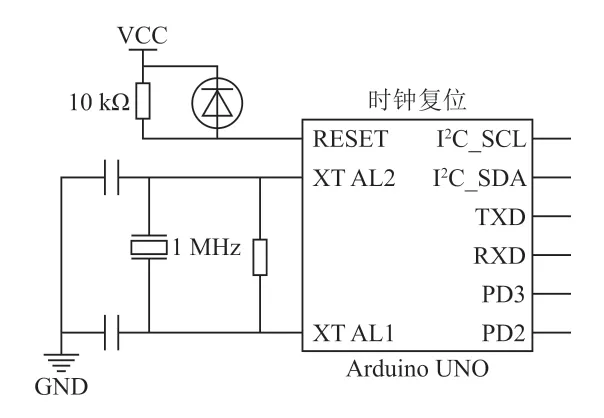
图2 主控制器模块电路
2.2 姿态传感器模块
姿态传感器电路采用MPU6050,MPU6050是由3个陀螺仪和3个加速度传感器组成的六轴运动处理组件,自带数字运动处理器(Digital Motion Processor,DMP)硬件加速引擎,具有体积小、功耗低、精度高的特点[5],本设计方案中MPU6050与主控制芯片之间使用I2C协议交互通信、数据传输[6],如图3所示。
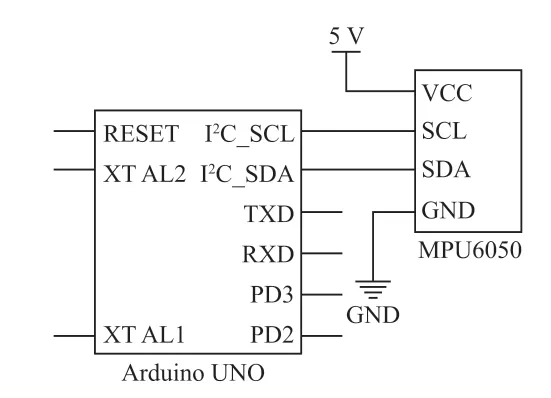
图3 姿态传感器模块电路
2.3 JSN-SR20-Y1超声波模块
本文采用JSN-SR20-Y1超声波模块测量距离,双探头测距可提供2~500 cm的非接触距离感测功能,测距精度可达到3 mm。JSN-SR20-Y1超声波模块相比于HC_SR04超声波模块,更加防水且性能稳定,抗干扰能力强。本文救生装置运用该模块测出水下障碍物与人之间的距离,帮助自救人员及时避开障碍物、免受伤害。超声波模块电路如图4所示。

图4 超声波模块电路
2.4 显示器模块
对于救生装置上的数据显示模块,本文采用的是TFT屏幕。TFT液晶显示屏的特点是显示质量高、可视面积大、画面效果好并且功率消耗小,这些特点能够帮助人们在水下更清楚地观看屏幕。本文中TFT屏幕由5 V供电,与主控制器之间使用UART串行接口(TTL电平)方式交互通信、数据传输。显示器模块电路如图5所示。
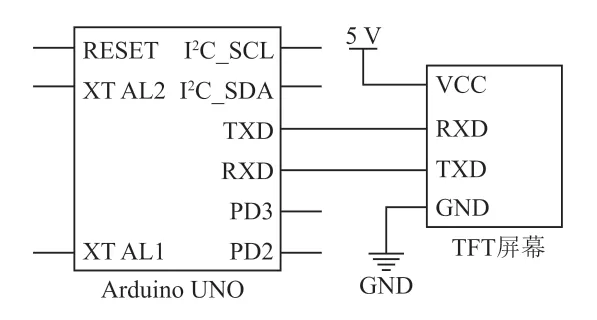
图5 显示器模块电路
2.5 推力模块
推力模块动力的大小可以通过调节油门拉环而改变,为了防止误触拉环,设计有滑动电源开关。无刷电机因其性能优良而在电机制造行业异军突起[7],本文推力模块以无刷电机作为动力来源,推力可达5 kg,可带动70 kg的人在水中以1 m/s的速度前行。
2.6 电源模块
电源模块采用高性能DC-DC,转换效率高;使用优质滤波电容;采用LM2596降压型电源管理单片集成电路的开关电压调节器,LM2596有固定和可调版本,输出电压范围为1.2~37 V,在输入电压最大不超过45 V的带载条件下,电压调整率为±4%,外围电路所需元件少[8];采用MP1584降压转化器,可输出3.3 V和5 V电压,且具有输出电源指示功能。电源模块电路如图6所示。
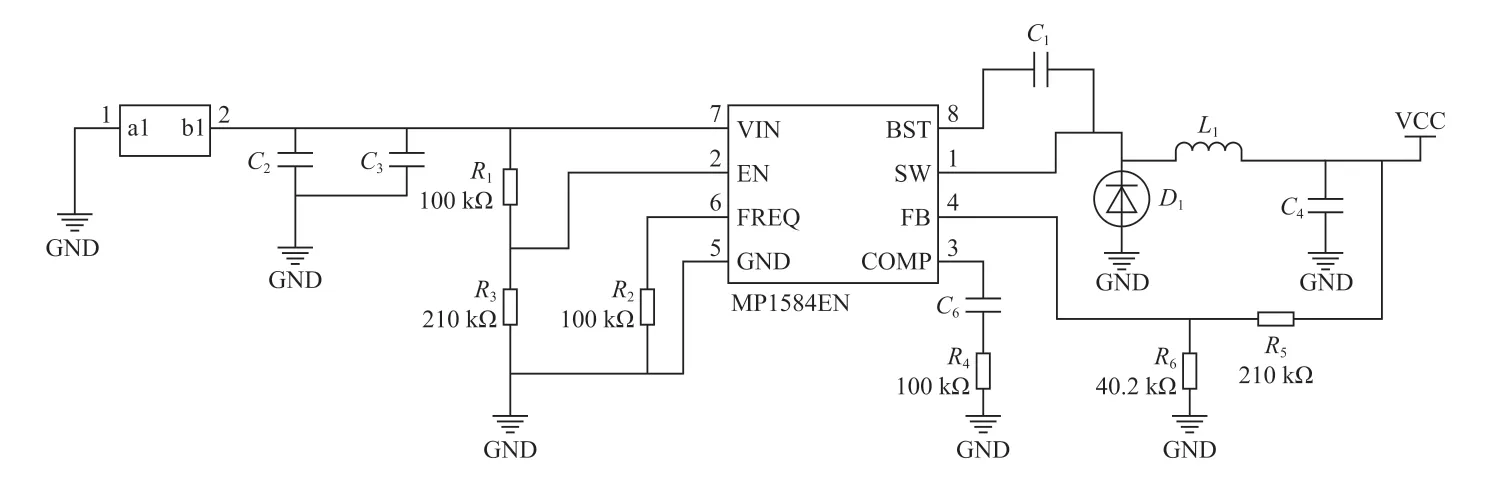
图6 电源模块电路
3 系统软件设计
完整的软件控制是本装置平稳运行的核心。本装置基于Arduino IDE编程环境,运用C语言编写代码。程序的关键在于采集MPU6050姿态传感器和JSN-SR20-Y1超声波传感器的数据并显示在TFT屏幕上,实时更新当前运动方向、自身姿态以及当前人与水下障碍物之间的距离数据,帮助使用者获得求生机会。软件设计流程如图7所示。
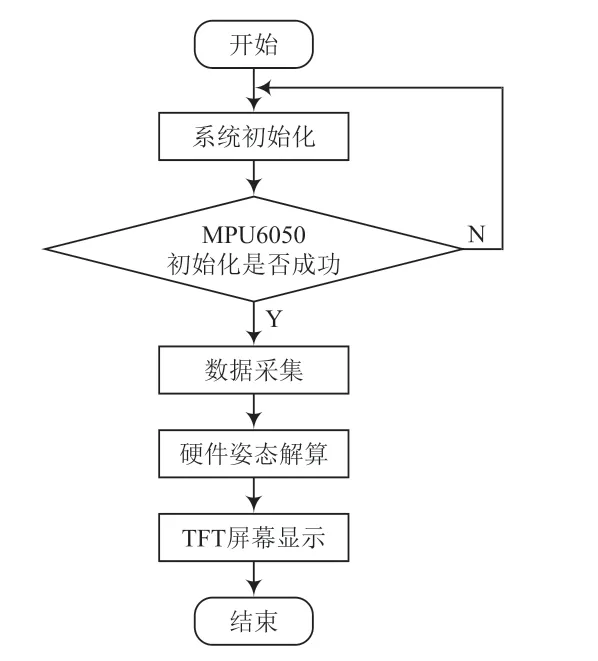
图7 软件设计流程
3.1 MPU6050数据处理
对于姿态部分的数据处理,本文采用的是硬件姿态解算算法,硬件姿态解算算法主要是通过MPU6050内置的硬件DMP直接读取四元数[9],从而得到quat[0]-quat[3],其中quat[1]-quat[3]是四元数的虚部,而quat[0]是四元数的实部,再通过式(1)~(3)[10]将其转化为俯仰角(Pitch)、横滚角(Roll)和偏航角(Yaw)。分别表示机体坐标系下的上下角(θ)、翻滚角(φ)以及左右角(ψ),57.3是由弧度转换的角度,即180/π,得到以“°”作为单位的数据结果。软件姿态解算则是通过软件模拟I2C读取加速度和陀螺仪中的数据,然后计算出四元数,再通过公式(1)~(3)计算出欧拉角。公式如下:
相比于软件姿态解算,硬件姿态解算直接读取四元数过程较为简单,解算时长较短,为279.2 μs。总体来说,硬件姿态解算算法所得到的欧拉角更加稳定[11]。硬件姿态解算算法对水下恶劣环境有着较好的抗干扰能力。程序串口调试如图8所示。

图8 程序串口调试界面
3.2 JSN-SR20-Y1超声波模块数据处理
JSN-SR20-Y1超声波测距模块可提供2~500 cm的非接触式距离感测,模块采用高性能处理器、工业级防水防尘超声波换能器、供电范围宽、低功耗且工作环境适应性强[12]。超声波的频率大于20 kHz,具有较好的反射性、定向性,本系统利用了它反射性较好的特性,采用平时较为常见的反射式测距方法。反射式测距指的是测距模块上同时安装了超声波的发射与接收两个装置,测距模块上的控制芯片控制超声波发射的同时开始计时,超声波在碰到障碍后会反射回来,接收装置将接收到反射回来的超声波,然后主控芯片会结束计时。原理如图9所示。
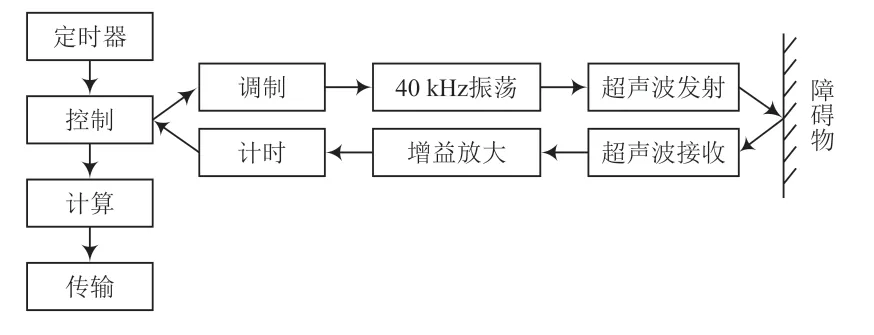
图9 超声波模块测距原理
使用JSN-SR20-Y1超声波模块测距,首先需要主控制器提供一个10 μs以上的脉冲触发信号,随后超声波模块内部会发出8个40 kHz周期的电平并检测回波,一旦检测到有回波信号则会输出回响信号,回响信号的脉冲宽度与障碍物的距离成正比。
通过发射信号到回响信号间隔的时间可以计算出障碍物间隔距离。超声波在水中的传播速度大约为1 500 m/s,即为0.15 cm/μs。换一个角度:1/(0.15 cm/μs),约为6.67 μs/cm,这意味着每6.67 μs传播1 cm的距离,实际上从发送到接收再到反射,超声波传播的是两倍的距离,所以实际是13.34 μs对应着1 cm的距离。在程序中需要把时间间隔除13.34,转换距离单位为cm。
4 实物展示
装置内部结构俯视如图10所示,TFT屏幕显示深度(单位cm)、上下角、翻滚角以及左右角的数据,方便使用者及时调整自身的姿态以及逃生方向;电源模块为装置供电;推进器设计符合人体工学,让使用者上手舒适。
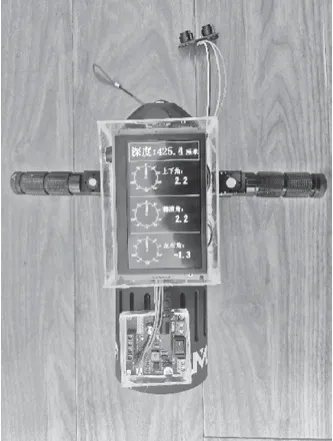
图10 装置内部结构俯视
装置内部结构侧视如图11所示,推进器两侧把手可手动展开和闭合,闭合后所占体积更小,更加方便携带,图中两侧把手为闭合状态。供氧模块放置在推进器正下方,采用便携式供氧瓶,使用者也可自行更换供氧瓶(氧气瓶的氧气含量大小和体积可由使用者自己做适当变化),以备不时之需。
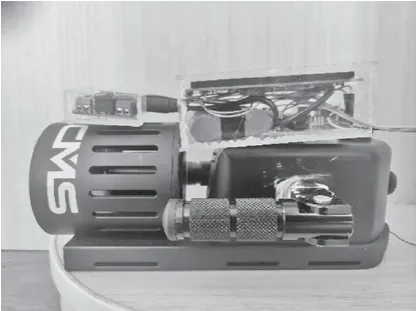
图11 装置内部结构侧视
TFT屏幕数据显示界面设计如图12所示,在该界面设计各数据的显示效果及方式,使得数据显示更加直观化、立体化,方便用户获取所需信息。

图12 数据显示设计界面
5 结 语
虽然我国对水下救援装备的研究起步较晚,但也制造出了具有一定功能的水下救援装置,由于研发相对较少,目前仍然存在一些问题。本文提出的基于三维混合定位的车载水下应急救生装置,相比于目前的水下救生装置,集智能化、个性化于一体,装置更加安全且造价低廉,性价比极高,致力于为用户打造安全、便捷的水下救生装置,在保障基本需求的同时,带给用户更舒适的体验,具有广阔的应用前景。
