航标灯闪光状态下的有效光强测量分析
2023-11-22邓莎江西省赣中航道事务中心
◎ 邓莎 江西省赣中航道事务中心
航标灯在长时间使用后发光效能可能会降低,因此需要定期开展航标灯节奏光有效光强的测量工作,确保其可以满足实际使用的需要。本文围绕着航标灯闪光状态下有效光强的测量技术手段进行了简要研究。
1.有效光强测量基本原理
对航标灯闪光信号的有效光强实施测量,先是要构建分布光度计测量系统,再基于国际或国家标准进行单、双立柱模式的测量。测量时,航标灯旋转共包含水平轴和垂直轴两个方向,要依据被测航标灯的功率、性能类型,进一步调节探测器在轴线上的距离,假设垂直轴需要优先旋转,则测量系统每调节一定水平角度时就要对该角度节奏光进行连续多次测量,获得对应光信号,之后通过公式来计算,就可得到其有效光强的参数结果[1]。
2.航标灯在闪光状态下测量有效光强的技术方法
大多数航标灯都是LED形式的光源,这种光源的实际发光效率与温度因素有着很大关系,且长时间持续维持定光状态就会造成温度变高,与闪光时相比温度高出许多,因此,若处于定光状态对发光有效光强进行测量,将无法客观反映出航标灯工作的真实发光强度标准,为了保证其有效光强测量结果的准确性,还需探寻相关测量技术方法,同时要遵循《航标灯光强测控和灯光射程计算》(JT/T730-2008)中的有关规定,确保LED光强测量时较为稳定。
2.1 相关技术指标
测量航标灯LED光源在闪光状态下的有效光强,主要是搭建由分布光度计、被测标准灯、计算机、导轨、电源、三维转台以及角度控制仪器等结构组成的测量系统,其可以通过控制方向变化来测得实际发光强度,再进一步计算有效光强参数。具体技术指标还包括下述几点:①被测标准灯能够在系统中绕着水平轴或垂直轴自由转动,实际转动角度范围为0-360°;②控制角度精度标准为0.2°,而传动角度的分辨率标准则为0.1°;③实际光度测量控制为标准光源下2%的精度,光度测量的光强范围为1-107cd(以探头位置为参考),照度范围为0.01-10 0 0 0l x;④杂散光部分不能超过0.1%;⑤被测航标灯与相关配套夹具的尺寸最大允许参数为1160mm(宽度)×1600mm(高度);⑥测量环境技术要求:控制环境温度范围为0-35℃,实测最适宜温度标准为25±2℃,相对湿度在70%以下,不可出现结露情况,安装合适的空调设备[2]。
2.2 计算公式
航标灯处于闪光状态下的LED光源也被称作节奏光,其进行有效光强计算时可以运用M A M相关公式,其通常采用光强函数结合视觉响应函数实施卷积计算,求出最大参数值,依据公式(1)和公式(2)。
在公式(1)当中,Ie表示的是闪光状态中航标灯实际有效光强参数,I(t)则表示t时刻节奏光产生的瞬时发光强度参数,q(t)则表示视觉脉冲响应函数。
在公式(2)中,t表示时间,其单位为s(秒),a则表示LED光源视觉时间常数,其中夜间时的蓝光显示时间常数a=0.2s,非蓝光显示时间常数a=0.1s。
除此之外,有效光强在经过重复测试时,可能会由于被测样品灯具不稳、仪器测试条件存在偏差以及读数产生误差等原因造成测试结果的不良波动,这也会引发不确定度分量,如表1所示为某次重复测量8次光强的结果,对其不确定度的评定则采用公式(3)与(4)。

表1 航标灯某次重复测量8次光强的结果
通过公式(3)来计算获得测试结果的标准差值:
上式中,s( )表示的是标准差,Pi表示的第i次测试的光强结果, 表示的是对应残差值,n为总测试次数。
通过公式(4)来计算获得标准不确定度值:
上式中,uA表示标准不确定度[3]。
2.3 测量工作的有关布置
被测航标灯在闪光状态下测量有效光强的工作系统仪器设备基本布置结构如图1所示。
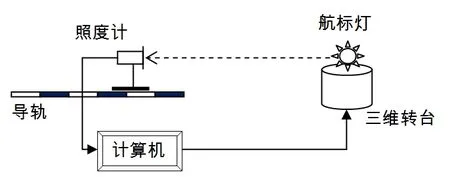
图1 测量工作系统中仪器设备的布置图
此次布置的核心工作仪器包括三维转台、被测标准灯(航标灯)、计算机、导轨以及照度计(分布光度计)等,其具体布置要求如下所述。
第一,三维转台设备,主要发挥出承载被测标准灯的作用,还要受到计算机仪器的直接控制,基于实际测量需求,还应当控制航标灯在3个不同维度上的方向变化,进而保证不同方向上对航标灯闪光灯光信号情况实现有效测量。
第二,被测标准灯,按照要求选择规格相符的航标灯固定到三维转台上方位置,要保证灯质可靠,可以稳定放出闪光状态的信号,并能够良好接受仪器测量。
第三,计算机,属于测量系统的核心仪器,其最重要的作用是对整个测量过程进行控制,同时也能快速处理获得的测量参数。基于测量要求对三维转台转动角度加以调控,使被测标准灯转到最合适的方向,计算机内置计算的数学模型即为上述提到的公式(1)与(2),计算机与照度计进行连接,接受来自照度计传送的节奏光测量数据,再进一步计算处理获得有效、准确的最终光强参数结果,保证测量到位。
第四,导轨,其主要为承载照度计仪器的构件部分,导轨轨道内可以让照度计自由滑动,在控制被测航标灯与照度计之间相对方向保持不变条件下,对两者的实测距离作出调节。
第五,照度计,即直接对航标灯节奏光信号进行测量,接收到的数据结果还会进一步传送给计算机设备。
2.4 实测流程
首先,对航标灯闪光状态下光强实际测量的环境进行控制,该项测量实验需要在暗室内开展,且保证环境温度在25℃左右,温度上下浮动偏差不宜超过2℃,测量位置的周围不能过于潮湿或存在灰尘,也要排除一切振动因素的影响,提高测量质量,电源调节电压值达到航标灯正常运转的要求。其次,设定灯质,被测的航标灯相同但灯质情况不同时,其测量得到的有效光强结果也存在差异,故此,开展测量试验时有必要选定较为常见的灯质,保证测量结果在判断时更加客观并符合真实情况,比如说当前国内航道经常使用的航标灯闪光状态灯光节奏标准为:周期6s(包括明0.5s、暗1s、明0.5s以及暗4s),其中共有2次联闪。最后是测量实施,测量前要进行被测灯的预热工作,由于LED光源的散热特性有所不同,实测时的预热时间要依据具体情况来控制,通常为15~60min,要保证光强稳定后停止预热,完成预热后在计算机中输入测量的一系列参数,通过计算机对三维工作转台实施控制,先要从水平方向上旋转到指定间隔角度,之后从各个角度通过探头快速采样收集获得闪光光强参数结果,制作成变化曲线,再通过上述分析的M A M算法公式计算每个角度有效光强的结果。
3.航标灯在闪光状态下时测量有效光强的技术要点
3.1 控制旋转的精度
从航标灯闪光状态下LED光源发光特点来看,结合其有效光强的实际测量需求,需要保证三维状态旋转精度得到合理控制,该转台能够在水平方向上呈360°旋转,垂直方向最大可旋转90°,计算机控制转动可匀速进行,也要保证转动时的步进幅度不可超出0.01°,如此便有利于提高光强测量的准确度,使测量结果更能体现价值。
3.2 仪器的有效定位
节奏光光强测量时还会依据兰伯特照度定律,为了保证测量的准确性,需要提高仪器定位水平,因此可结合公式(5)来进一步计算。
在上述公式当中,I0表示的是测量的航标灯光强结果,E则为相关照度计显示面上的照度参数,l则表示实际测量时的仪器距离,θ表示的是照度计接收端法线和发出光束间形成的夹角角度。
在上述参数明确后即能有效定位仪器位置,同时也可让被测标准灯与照度计光束接收端位置呈正对形式,也就是控制θ为0°,在这种情况下可以转换上述公式变成公式(6),为准确测量和仪器定位计算提供更方便的条件。
3.3 合理设置测量距离
在兰伯特照度定律当中,通过照度测量是以点光源为基准,但实际测量的航标灯发光体不能够直接看作成点,要考虑体积影响,故此应保证测量距离更大,主要是加长导轨部分,但也不能让实测距离设置太远,否则相关照度计接收端可能无法获得充足光线,从而导致测量结果的精度下降[4]。
为了研究出合适的测量距离,此次选择了一个标准款航标灯进行了不同距离的测量实验,通过实测结果可以发现,所研究航标灯当测量距离设置长度超出7.9m时,光强变化颇小,都不超过2%,这也与上述分析的公式(6)要求一致。该研究还能确定测量距离不可小于航标灯发光面直径50倍参数,实验中主要是以0.5m为测量距离每段递增的标准,在各个距离下的测量获得光照度结果来看,其计算获得的光强值都能够使公式(6)成立,依据照度计显示要求,还应确保测量距离保持其读数不小于0.001lx,这也为上限值。图2为航标灯不同测量距离下的光强结果变化。

图2 航标灯不同测量距离下的光强结果变化
3.4 把控预热时间
在预热时间控制方面,可以选择两个闪光节奏分别为亮0.5s暗1.5s和亮0.4s暗1.5秒的航标灯来进行研究,其周期皆为2s,每次间隔5min进行一次节奏光光强测量,总测量时间为50min,同时进行预热,再对各时间段相对误差值加以计算。计算发现,随着时间的增加,有效光强测量结果的误差也越来越小,表示航标灯节奏光变化慢慢趋向于稳定,但预热时间达到20min后误差降低到2%以下,故而可控制把控预热时间为20min。
3.5 采样的频率与时间控制
对测量采样的频率,选择了50Hz、100Hz、150Hz、500Hz、3 0 0 H z、5 0 0 H z、1 0 0 0 H z 以及2000Hz等几个标准的频率,设置闪光状态周期一致的航标灯信号,结果显示,采样频率增加过程中,相关测量结果会逐渐下降,而500Hz时误差降低到1%以下,故而其也为最佳频率,采样时间方面,为保证测量结果的准确,最好控制时间不小于航标灯闪光周期的4倍标准。
4.结论
综上所述,对航标灯的闪光信号光强进行测量时,需要构建合理的测量系统,布置好各项仪器,同时也要依据特定公式来计算获得的数据。由本文分析可知,航标灯在闪光状态下时测量有效光强的技术要点包括:控制旋转的精度、仪器的有效定位、合理设置测量距离、把控预热时间、采样的频率与时间控制等。
