激光泵浦铯-氦磁强计的噪声抑制
2023-11-21伏吉庆孔嘉程华富
伏吉庆孔 嘉程华富
(1.中国计量科学研究院,北京 100029;2.杭州电子科技大学理学院,杭州 310018;3.中国船舶重工集团有限公司第七一〇研究所,宜昌 443003)
1 引言
铯-氦磁强计是一种被设计用于高准确度测量磁场的量子磁强计。在目前的磁强计分类中,质子磁强计和光泵原子磁强计以高准确性著称,在计量和勘探领域得到广泛应用。质子磁强计利用质子旋磁比物理常数测量磁场,被称为“绝对磁强计”。然而在地磁范围内其灵敏度已经受限,准确度难以突破0.1 nT。光泵磁强计在弱磁场中以其超高灵敏度受到学界广泛关注,然而这种磁强计在泵浦光照射时会产生约1 nT 的光致转向误差,导致其准确度一直无法超越质子磁强计。上世纪90 年代前苏联科学家通过将碱金属铯和氦原子的混合气室作为工作物质研发了一种铯-氦磁强计[1],利用间接光泵浦技术[2],从原理上消除了光致转向误差,使光泵磁强计的准确度得到大幅提升,成为当时在地磁范围内准确度最高的磁强计[3],同时由于其磁场测量值对温度、光强、调制强度等参数的变化不敏感[4,5],拥有非常好的计量学性质,因此被多个国家应用在国家基准磁场装置中[6,7]。
基于该技术,俄罗斯国家计量院VNIIM 建设的铯-氦基准磁强计的准确度在地磁范围内可以达到约0.01 nT,受限于其灵敏度[5,6]。因此降低噪声,提高灵敏度是进一步提升铯-氦磁强计准确度的关键[8,9]。
为进一步提高铯-氦磁强计的灵敏度,搭建了一套铯-氦磁强计试验系统,通过单模激光产生的窄线宽的D1 线共振激光,提升对铯原子的泵浦效率,从而增大铯-氦磁强计的信号幅值。同时对磁测量的噪声成分进行测试和分析,研究进一步降低测量噪声、提高信噪比的方法。
2 铯-氦磁强计试验装置
铯-氦磁强计装置示意图如图1 所示,主要由895 nm 的DBR 激光器提供泵浦光源,铯-氦气室、光电探测器、激励电极和控制电路等组成的传感器模块组成[9]。

图1 激光泵铯-氦磁强计结构示意图Fig.1 Schematic diagram of the laser-pumped Cs-He magnetometer
激光光束首先被塞曼饱和吸收锁频模块锁频,利用调整光路将光斑整形为直径1 cm 的圆偏振光,最终射入铯-氦气室。利用频率为50 MHz、重复频率为1 kHz 的脉冲微波激励亚稳态氦原子。亚稳态氦原子通过和自旋方向已经被光极化的铯原子发生潘宁碰撞和自旋交换碰撞来完成自旋极化[2]。
垂直于光传播方向施加了用于诱导原子自旋在塞曼子能级间发生共振跃迁的交变磁场,从而构成MZ型磁强计[10]。
磁共振信号通过一个光电探测器和5 MΩ 的跨导放大器转换为电压信号,再通过锁相放大器进一步解调并输出磁场测量值。
整个传感器被放置在中国计量院的复式亥姆霍兹线圈系统中,该磁场系统可提供地磁(20~100)μT范围内的高稳定度(磁场波动峰峰值3 pT)、高均匀度(10 cm 范围内一致性优于0.05 nT)的标准磁场B0。
3 试验信号及分析
3.1 信号幅值与线宽
首先对铯-氦磁强计的磁共振信号进行优化。通过大量试验,可以得到信号强度对温度、调制强度和脉冲放电强度的关联性[9],在36 ℃,施加约0.7 mW/cm2的泵浦光,在地磁场附近,可以得到如图2 所示的经锁相放大器解调后的一阶谐振磁共振信号。
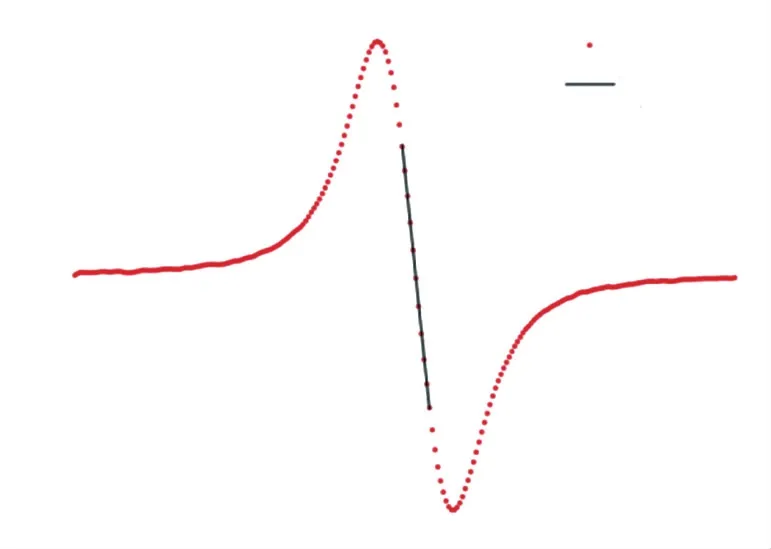
图2 铯-氦磁强计共振信号图Fig.2 Resonance signal of the Cs-He magnetometer
从图2 中可以看出,磁共振信号的振幅A为0.4V,半腰半宽ΔB为25 nT。图2 中,共振中心附近信号斜率经拟合为5.4 nA/nT。而传统的放电灯泵浦式铯-氦磁强计的转换因子约为0.91 nA/nT[4],铷-氦磁强计的转换因子为1.75 nA/nT[11],钾-氦磁强计的转换因子为1.67 nA/nT[12]。相比之下,研制的激光泵浦式铯-氦光泵磁强计的转换因子增大了5 倍以上。
传统的光泵磁强计中,泵浦光在提供极化原子的同时,也会造成功率展宽,因此需要将光强调节到一个最佳值。太弱不足以极化所有原子,使信号变弱,太强又会使信号增宽,使信号中心的斜率减小,都不利于灵敏度的提升。然而在铯-氦光泵磁强计中,由于氦原子没有直接被激光极化,而是通过与铯原子的碰撞完成极化过程的,因此泵浦光导致的信号衰减和线宽增宽效应都消失了。
考察了光强与信号幅值和线宽的关系。由于在地磁范围内的试验装置引入光纤,无法使光强在大范围调节,为研究光强的影响,将试验装置放置在磁屏蔽筒中,施加1 000 nT 磁场,将光纤改变为自由空间射入的泵浦光,并将跨导放大器减小为10 kΩ。如图3 所示可以看到,随着光强的增加,信号幅值A会随之增大,并趋于饱和,而信号线宽ΔB在随泵浦光增大而快速增大到25 nT 左右后的很大范围内是和泵浦光强无关的。这种信号特征说明很大范围内,光强的改变对信号输出不造成影响,即信号对光强的波动不敏感,这一点对开发实用仪器尤为重要。
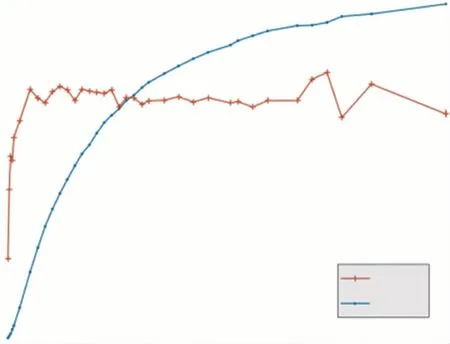
图3 光强与信号幅值、线宽关系图Fig.3 Relation between light intensity and signal amplitude and line width
3.2 最佳光强
如图3 结果,铯-氦磁强计信号在很大范围内不会因为光强的增大而减小,但这并不意味着光强越大越好。因为激光的散粒噪声也会随着光强的增大而增大。磁强计的灵敏度δB定义[13]为:
式中:ΔB——信号线宽;A——信号幅值;N——噪声水平。
在130 Hz 处测量了带宽为1 Hz 的激光噪声水平与光强的关系,如图4 所示。其中十字黑线为灵敏度,空心圆线为信号斜率,空心三角线为噪声水平。内嵌图中绿色曲线,噪声水平和光强基本成线性关系。
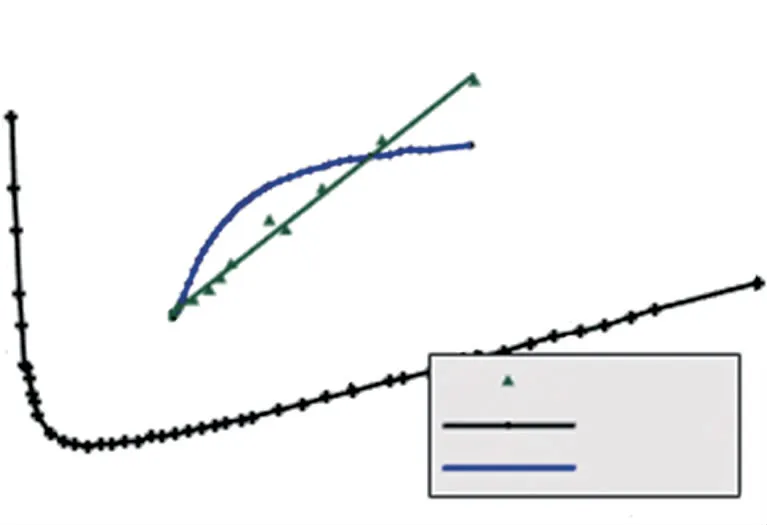
图4 灵敏度与信号斜率、噪声、光强的关系图Fig.4 Relation between sensitivity and slope,noise and light intensity
从图4 内嵌图中的空心圆线可以看出,虽然随着光强增大,磁强计的磁场转换因子S也增大,但光强超过1 mW/cm2后,S的增速减慢并逐渐收敛到一个最大值。但是光强的噪声却随光强的增加而线性增加。因此有一个最佳的光强,使信噪比达到最佳值。在目前的试验系统中,该光强为0.7 mW/cm2。
3.3 噪声分析
根据图4 可知系统最大的噪声来源为激光的功率涨落。为降低光源的噪声,设计了一套激光稳定模块,在泵浦光即将射入铯-氦气室之前,1 ∶1 的分出一部分泵浦光进行光强波动的监测,再加入一个声光调制器(AOM)通过调幅来抑制光强的波动。
首先,测量了DC~200 Hz 频段光强的噪声功率密度谱(PSD),如图5 所示。其中红色虚线为光强的自由波动噪声,经过闭环锁定后,变为红色实线的噪声。黑色虚线和实线分别为真正射入原子气室的工作泵浦光开环和闭环的噪声功率密度谱。从图中可以看出,加入闭环后,工作光在(50~200)Hz 范围内降低了2 个数量级的噪声。在(10~50)Hz 范围内降低了至少1 个数量级的噪声水平。信号噪声是叠加了所有噪声来源后的总噪声。从测量结果可以看出,光电探测器的噪声(蓝线)和信号采集电路的噪声(绿线)存在较大的50 Hz,100 Hz,150 Hz的工频噪声。光电探测器和信号采集电路总的本底噪声比闭环后的光强噪声小1 个数量级。

图5 激光噪声的功率密度谱图Fig.5 The power spectral density(PSD)of laser's noise
由于铯-氦磁强计的响应速度较慢,将磁信号的时域噪声峰峰值进行对比。如图6 所示,对比了在进行激光降噪和不进行激光降噪时磁信号噪声峰峰值的区别。可以明显看出,开启降噪后,噪声峰峰值降低到了0.02 nT 以内,不进行光学降噪时,铯-氦磁强计的噪声达到了约0.3 nT 的峰峰值。
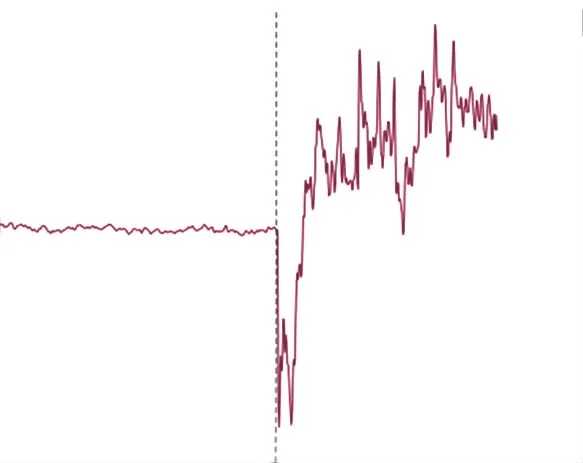
图6 抑制激光噪声前后磁场时域信号对比图Fig.6 Comparison of magnetic field time domain signals before and after laser noise suppression
这里需要值得注意的是,图6 的时域噪声是在地磁环境下,施加光强主动降噪后测得,而图4 的噪声估计值是在磁屏蔽筒中利用自由空间光测得。虽然磁屏蔽筒可以屏蔽高频磁场波动,但是低频磁场的波动难以较好抑制,同时,在磁屏蔽筒中产生待测磁场B0时,会引入电流源的噪声,磁场噪声峰峰值约为0.1 nT。而图6 的B0是通过中国计量科学研究院的3 m 线圈系统利用自激光泵磁强计稳场得到,其磁场的稳定性由磁强计的本底噪声决定,磁场噪声峰峰值达到了0.003 nT。因此图6 得到的噪声优于图4 的噪声水平。
通过减小背景磁场的波动、提高激光输出功率的稳定性,激光泵浦式的铯-氦光泵磁强计灵敏度超越了传统放电灯5 倍以上,目前分辨率达到了0.02 nT,为进一步提高其准确度提供了技术支持。
4 结束语
搭建的激光泵浦式铯-氦光泵磁强计,相比传统灯泵式铯-氦磁强计,磁共振信号的灵敏度提高了5 倍。通过对各种试验要素的噪声的测量,发现光源的功率涨落是噪声的主导因素,并给出了可以达到最佳信噪比的光强值。对铯-氦磁强计的极限噪声进行分析,结果表明优化光源的稳定性可以将铯-氦光泵磁强计的分辨率提升一个数量级。鉴于目前铯-氦磁强计的准确度主要受限于其灵敏度[14],所研制的激光泵浦式铯-氦磁强计有很大潜力进一步提升磁强计的准确度。将铯-氦磁强计替代质子磁强计作为主标准器,有望将恒定弱磁场标准装置的测量不确定度(k=2)由目前的(0.3~0.6)nT提升到(0.03~0.05)nT 甚至更优。