基于无刷直流电机高压断路器操动机构的特性研究
2023-11-20马磊
马 磊
(国网湖北省电力有限公司直流公司,湖北宜昌 443000)
0 引言
随着建设“坚强智能电网”的目标提出,特高压电网得到了快速发展[1]。由此,各类电力系统相关设备也得到了快速发展[2]。其中,高压断路器是其关键设备之一,其智能化操作是一个研究重点[3]。
高压断路器合闸、分闸的性能与其操动机构性能密切相关。电磁操动机构、气动操动机构以及液压操动机构均具有响应时间长的缺点,导致其动态特性差[4,5]。而电动操作机构具有响应时间短、精度高等特点,因此研究电动操动机构应用于高压断路器的方法十分必要[6]。
电动操动机构能够通过储能电容完成功能,能够实时采集断路器的工作状态,进而实现高压断路器的状态监测、故障诊断,完成高压断路器的智能化改造[7-9]。
无刷直流电机的结构简单、功率密度高,适用于作为高压断路器中的操动机构[10-11]。高压断路器在分闸过程与合闸过程中,操动机构的出力曲线并非恒转矩,因此需分析其在合闸过程与分闸过程中的受力情况,以作为无刷直流电机的控制系统的输入参考[12]。
本文首先分析了操动机构的工作原理,获得了高压断路器在合闸与分闸过程中电机的输出转矩。然后根据电机的数学模型分析推导了其控制策略。并在Matlab中搭建了仿真模型。
1 操动机构特性
1.1 操动机构运动特性
高压断路器包括驱动部分、控制部分以及真空断路器。而驱动部分可采用无刷直流电机,其驱动机构运动过程可分为四个过程:电能供给、能量缓冲、能量释放与传输。以无刷直流电机为驱动系统的高压断路器的原理如图1所示。

图1 高压断路器原理
处于合闸状态时,主轴a旋转角度推动拐臂逆时针运动,连杆在拐臂作用下运动,绝缘拉杆在连杆作用下运动。绝缘连杆运动的位移为S,当S=S0时,动、静触头闭合,此时高压断路器工作于闭合状态。主轴继续旋转,弹簧开始压缩,当主轴旋转角度θ达到θ0时,主轴旋转结束,此时弹簧压缩量即为接触行程c。
该高压断路器的分闸过程与合闸过程相反,不再赘述。
1.2 操动机构反力特性
图1中,f处为操动机构的各部件质量的等效质量Mf,此时,根据能量守恒定律可知,操动机构的出力F与断路器负载反力Fz的关系可表示为:
式中,v为触头速度,v0为初始速度。
断路器的负载反力包括两个部分:断路器的反力Fj以及各个轴销的摩擦力ML。此时,系统的运动方程可表示为:
通常情况下,Ml较小,且为高次复杂函数,为了简化计算,本文利用损耗来表示轴销处摩擦力。此时,系统的运动方程可简化为:
式中,η为效率。
图2给出了高压断路器合闸与分闸过程中,随着主轴旋转角度变化所需的操动机构的出力。
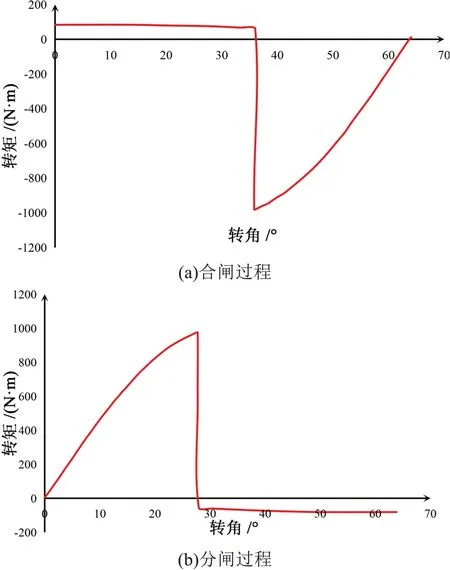
图2 高压断路器操动机构作用力
图2(b)中,在高压断路器分闸初期,操动机构出力为正,即出力做正功,可作为分闸能量的一部分,另一部分的分闸能量由触头弹簧提供。因此,在分闸初期,触头分闸加速度较大,触头分闸速度快速提高,满足分闸速度需求。
在分闸后期,操动机构的出力为负,即出力做负功。在该负力的影响下,触头的加速度为负,触头的运动速度变小,做减速运动。因此当分闸结束时,触头的速度很低,对机构的冲击力较小,提高了高压断路器运动机构的寿命。
2 操动机构控制原理
高压断路器的操动机构由电机、位置传感器以及位置限位保持装置构成。该位置限位保持装置能够确保高压断路器在分闸状态、合闸状态时,机构能够保持在固定位置。而位置传感器可检测电机的转角位置信息。本研究所用位置传感器采用增量式光电编码器。
2.1 操动机构运行原理
图3所示为操动机构的电机驱动电路。

图3 操动机构驱动电路
图3中,该无刷直流电机的换向可通过T1至T6的导通与关断实现,其导通规律如图4所示。

图4 IGBT导通规律
由图4 可知,在任意时刻,都仅有两只IGBT 导通,且每只IGBT 导通60°。在任意时刻,均有一只上桥臂IGBT与一只下桥臂IGBT导通。
2.2 操动机构数学模型
高压断路器的分闸与合闸过程,本质上是操动机构中无刷直流电机的瞬间起动与制动过程,具有控制时间短的特点。因此其数学模型十分重要,关系到控制系统的精确性。
2.2.1 IGBT特性
IGBT 在开通状态下,存在导通压降,且该压降并不是常数,而是受到集电极电流、工作温度等因素的影响。而无刷直流电机的特点为绕组电阻小、启动电流大,因此IGBT的导通压降不可忽视。
IGBT的导通压降可表示为:
式中,Uth、RT以及iT分别为IGBT的开启电压、等效通态电阻以及集电极电流。
IGBT的反并联二极管的导通压降可表示为:
式中,UDt、RD、iD分别为二极管开启电压、等效电阻与电流。
2.2.2 无刷电机数学模型
无刷电机的转矩方程可表示为:
式中,ω为转子角速度。
无刷电机在任意时刻,仅有两相通电,其两相感应电动势经过逆变器串联,因此电磁转矩可表示为:
式中,KT为无刷电机的转矩系数,Id为两相绕组电流。
无刷电机的机械运动方程可表示为:
式中,TL为负载转矩,f为阻尼系数,J为转动惯量。
2.3 操动机构控制策略
本研究采用双闭环控制操动机构中的无刷电机,其控制框图如图5所示。

图5 操动机构控制策略
图中,电流环控制器的输入参考值可表示为:
式中,Iref(k)为速度环的输出,同时也是电流环的参考输入,KP、KI与KD分别为速度环调节器的比例系数、积分系数以及微分系数。e(k)为第k次的速度误差。
无刷电机的调节过程是通过PWM 调制实现的,PWM 的占空比可通过DSP 中比较寄存器实现。其表达式如下:
式中,COMP(k)为电流环调节器第k次的输出,e(k)为电流环第k次输出误差,S为积分分离开关,KPi、KIi分别为电流环调节器的比例系数与积分系数。
3 结果分析
为了论证所提采用无刷电机作为高压断路器的操动机构的控制策略的可行性,搭建了仿真模型,其参数如表1所示。

表1 仿真系统参数设置
图6所示为无刷电机的速度反馈。其中速度环调节器采用PID 控制器,电流环调节器采用PI 控制器。图6 中,A 表示速度输入参考曲线,B 表示速度跟踪曲线。由图可知,在0.025 s 之后,无刷电机的输出转速能够跟踪转速参考值。

图6 无刷电机速度波形
4 结论
提出了采用无刷电机作为高压断路器操动机构的方法,并给出了控制策略。
分析了操动机构的运动特性与驱动电路的等效电路,并根据无刷电机的数学模型推导了无刷电机的控制策略。结果表明,采用无刷直流电机作为高压断路器操动机构能够满足其合闸、分闸要求,因而具有一定的可靠性与稳定性。