无人机多光谱遥感在农作物生长监测中的应用综述
2023-11-20封伟祎朱俊科彭文宇宋晓斐毕爱君车海龙
封伟祎 朱俊科 彭文宇 宋晓斐 毕爱君 车海龙
(山东理工大学农业工程与食品科学学院,山东 淄博 255000)
引言
无人机遥感技术的使用原理,是由无人机搭载传感器,利用无人驾驶飞行、遥感传感器、数据通信、GPS定位系统、时差分定位(Real-time kinematic,RTK)等技术来完成对地物遥感数据的提取,从而对遥感技术数据进行处理、建模与数据分析研究,从中提取出所需的信息。
近年来,无人机多光谱遥感技术的应用在农业生产中的意义显得越来越关键,利用无人机多光谱遥感技术能够监测作物长势、受灾情况和营养状况,让农户更高效地管理作物的土壤、施肥和浇水,最大限度地降低农药喷洒、施肥、浪费水分,同时提高粮食作物的产量,对农户的工作和植被环境的维护有着很大的好处[1]。过去人们需要实地测量才能获悉作物的生长状况,费时费力,而采用无人机遥感技术只需分析遥感影像即可实现作物生长数据的获取;无人机遥感具备时效性好、尺度小、材料轻、分辨率高、费用低等优点,在保证了高分辨率的同时节省了人力物力,为农业生产提供了极大的便利。
本文中对遥感无人机和多光谱相机的类型和特性、多光谱技术在农作物表型数据监测中的主要作用、农业灾害监测等方面的研究进展详细阐述,并希望对今后多光谱遥感在农业生产领域的研究发展与推广应用提供借鉴。
1 遥感无人机和多光谱相机的种类与特点
1.1 无人机的种类与特点
根据飞行平台构型的不同,无人机主要分为无人直升机、固定翼无人机以及多旋翼无人机[2]。
1.1.1 无人直升机
通常指单旋翼带尾桨的直升机。
1.1.2 固定翼无人机
即由推动设备提供飞机向前的推动或牵引力,在机体的固定机翼形成升力后,在大气层中飞行的重于气流的飞行器。
1.1.3 多旋翼无人机
指多于3个轴以上的旋翼机,利用螺旋桨之间相对速度来调整牵引力与转矩,操控航空器悬停、转弯及航线行驶[3]。飞行平台的种类与特点见表1。

表1 无人机飞行平台的种类与特点
目前,多旋翼无人机在农业生产的运用已经非常普遍,可根据对性能的需求进行选择,而无人直升机与固定翼无人机很少在农业遥感领域使用。
1.2 多光谱相机的型号与应用
多光谱照相机是指拥有2个以上光谱波段通道的照相机,一般含有蓝、绿、红、红边和近红外波段,适用于NDVI等各类植被指数的分析[4]。一般高清摄像机只从红、绿、蓝3个频段中获得数据,而多光谱摄像机能从近红外波段和红边波段获得更多的数据,有助于比较精确地进行作物估产、长势检测和营养判断等,见表2。和高光谱成像仪比较,多光谱摄像机具有成本低、尺寸小、数据量小和覆盖范围大等优点,在大范围的区域研究中具有普遍的运用[5〗。
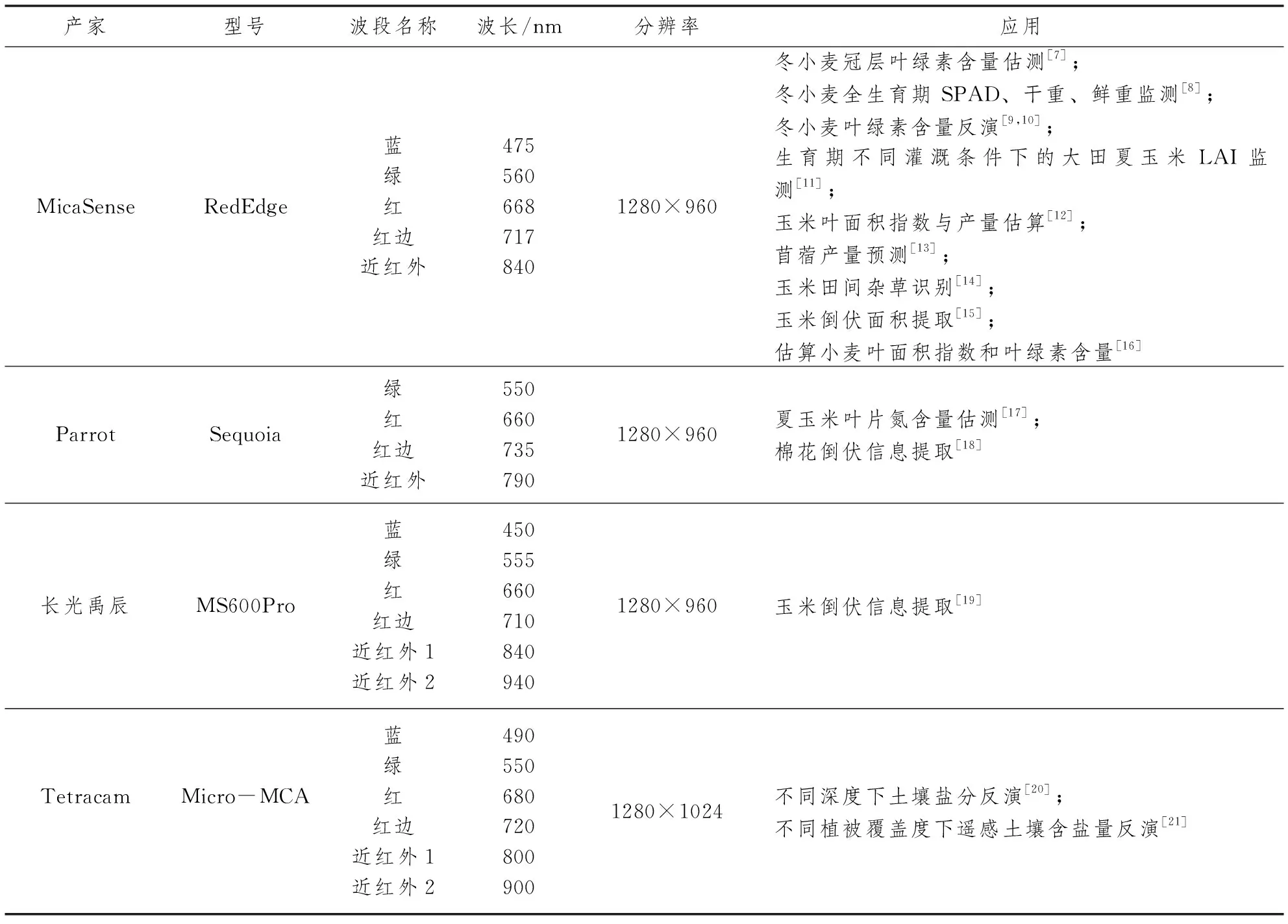
表2 多光谱相机的型号与应用
1.3 多光谱数据的处理方法
通常使用Pix4D mapper等图像处理软件对获得的多光谱图像进行拼接处理。将影像导入Pix4D mapper,编辑相机参数、添加像控点、初步刺点,随之进行空中三角测量、生成点云和纹理,得到数字表面模型(Digital Surface Model,DSM)和多波段数字正射影像(Digital Orthophoto Map,DOM)。需要注意的是,在生成DSM和DOM之前,需要利用白板影像进行辐射校正,消除或改正因辐射误差而引起的影像畸变[6]。
用ArcGIS、ENVI等软件可对影像进行图像裁剪、几何校正、合成多波段影像等后续处理,利用感兴趣区域(Region of interest,ROI)工具对合成的多波段影像进行图像分割,提取光谱反射率数据,构建植被指数。通过灰度共生矩阵提取纹理特征。
2 多光谱在作物表型信息监测上的主要应用
2.1 农作物叶绿素含量监测
叶绿素是植物吸收与利用光能的最主要媒介,由于农作物的叶绿素含量也与其光合水平有关,所以,叶绿素含量表现的是作物的光合水平和含氮物质的营养状况,同时在逆境胁迫的条件下,也可用以反映植株的伤害程度与健康状况。因为叶绿素a、叶绿素b、胡萝卜素等可以吸取不同波段的光,故利用多光谱遥感分析作物冠层的反射光谱的差异能够检测植物叶绿素的含量与组成。
目前,监测叶绿素含量的方式主要是通过选择相关植被指数与叶绿素相对含量(SPAD值)进行Pearson相关性分析,选择相关性较大的植被指数或波段光谱反射率,运用线性回归,如逐步回归、偏最小二乘回归(PLSR)、岭回归(Ridge),以及一些常用的机器学习回归算法,如随机森林回归、支持向量机(SVR)回归、bp神经网络回归等方法进行建模,达到对叶绿素含量实时监测的效果。
魏青等[7]对冬小麦设置不同施氮水平,分析各生育时期的多种光谱指数与叶绿素含量的相关性,构建一元二次回归和逐步回归模型分析,通过检验样本数据进行精度评价,进而确定了关键生育时期预测冬小麦SPAD值的最优模型。牛鲁燕等[8]同时提取了与叶绿素含量相关的植被指数以及光谱反射率,运用多元线性回归方法建立了小麦长势监测模型,经研究分析得出,由NDVI、SAVI、CCCI 3个植被指数使用多元线性回归方法构建的模型稳定性最好,精确度最高。刘涛等[16]设立不同飞行高度采集多光谱影像,通过选用DSI、RSI、NDSI和经验植被指数与小麦SPAD值建立相关性分析,基于优选光谱指数,运用多元线性回归方法、偏最小二乘回归方法和人工神经网络方法构建预测小麦SPAD值的回归模型,并对其进行精度分析,研究表明,反演小麦叶绿素含量稳定性最好、精度最高的模型是人工神经网络模型,决定系数R2达到了0.804,实现了小麦叶绿素含量的准确估算。以上研究都是基于多光谱影像构建植被指数并建模来对小麦叶绿素含量进行反演,周敏姑等[10]探究了利用光谱反射率进行建模反演的方法,选取冬小麦的多个重要生长期进行影像的采集,通过分析不同波段的反射率与冬小麦叶绿素含量的相关性,运用主成分回归、逐步回归和岭回归法对小麦冠层叶片5个波段反射率与叶绿素含量建立回归模型,并基于各模型的精度评价得出了各生长期反演叶绿素含量的最优模型。无人机多光谱遥感对农作物叶绿素含量进行有效监测可以帮助及时了解农作物的营养状况,为实现精细化田间管理提供了重要的技术依据。
2.2 农作物叶面积指数监测
叶面积指数(Leaf Area Index,LAI)主要体现了农作物的光能效率,同时其也是表现农作物生长发育情况的另一项主要指标,其大小直接与作物的最终产量挂钩[22]。不同的叶面积指数对光的反射率是有所不同的,这样就可以通过分析多光谱影像来实现对农作物叶面积指数的估测[23]。
目前,通过无人机多光谱遥感进行叶面积指数的反演已经应用到了小麦、玉米、水稻、棉花、大豆等多种作物上。邵国敏[11]等利用多光谱数据,建立了NDVI、SAVI、EVI、GNDVI、VARI 5种植被指数与全生育期玉米叶面积指数的一元线性回归、多元线性回归和随机森林回归模型,实现了运用随机森林回归方法预测不同灌溉水平下的夏玉米叶面积指数,决定系数R2达到了0.74~0.87。刘涛等[16]通过分析不同高度下的小麦冠层多光谱影像,选用DSI、RSI、NDSI和经验植被指数与小麦叶面积指数构建多元逐步回归、偏最小二乘回归和人工神经网络模型,分析得出运用偏最小二乘回归模型反演小麦叶面积指数的精度最高,决定系数R2达到了0.732。
2.3 农作物营养元素含量监测
营养元素是作物生长过程不可或缺的一部分,而氮、磷、钾3种主要营养元素更是与作物生长状况密不可分。缺少氮元素会减少植株内的蛋白质合成,从而导致叶片变黄、光合作用减弱,对作物产量造成严重的影响[24];缺少磷元素会使作物生长缓慢,抑制作物的分支和开花;缺少钾元素则会抑制碳水化合物和氮元素的代谢,造成植株叶片干枯脱落。根据作物生长状况合理施肥,对作物的生长具有非常重要的意义。
遥感技术具有广覆盖、时效性强、多载荷的特殊优点,具体体现:可以即时连续高效的收集作物生长情况和养分数据;将数据实现了空间整合,为适时提出的农作物养分调优栽培方法提供了重要技术支持,从而可以快速提升作物营养元素检测的准确性等。多光谱遥感有信息量大、分辨率高的特点,过去传统的营养元素含量检测方法会造成样品的破坏,并且需下地实测,耗费时间和人力,而多光谱遥感能够实现对作物养分含量和生长数据的即时无损检测。
魏鹏飞等[17]通过选用多种光谱指数与夏玉米氮含量建立相关性分析,根据其相关程度,运用向后逐步回归方法进行建模分析,最终确定了不同生育期下估算夏玉米氮含量的最佳模型,但因为该研究中选取的不同品种和不同施氮水平2个处理条件有机的组合,提高了数据处理的重复性,建模的准确性也较差,不过证明了建模方法在不同田块环境下的适应性。傅友强[25]等设置3个施氮处理,选用NDVI、GNDVI、RVI、EVI、DVI、MNLI 6个光谱指数,与不同施氮水平的水稻数据集建立多元线性回归模型,决定系数R2均达到了0.85以上,为水稻的精准施肥提供了极大的便利。作物水分和氮素吸收效率低是制约农业生产力的主要因素之一,杨梦娇等[26]选用3个小麦品种,设立4种水分处理、4种氮素处理,通过多光谱遥感建模估算其土壤水分、氮含量、生物量和产量相关参数并计算水分和氮素吸收效率,研究表明,灌水120mm和施氮180kg·hm-2处理的“中麦895”水分利用率和氮素利用率均表现优异,且无人机多光谱遥感可用于预测全生育期的水分吸收率和氮素吸收率,以选择优质基因型,并监测不同氮和水剂量下的作物效率,有助于帮助育种者选育高产广适的优良品种。
2.4 农作物产量监测
国家粮食安全问题是我国安全的重要基础,而作物的产量与我国粮食安全密切相关,亦是作物研究所追求的终极目标。近年来,随着无人机多光谱遥感技术的发展,许多学者开始运用多光谱遥感进行作物产量的估测研究。
王来刚等[12]通过选用玉米拔节期、抽雄期、吐丝期的植被指数累加值与玉米收获率建立相关性分析,发现基于GNDVI、NDVI和EVI建立的产量预估模型精度最高,其中,基于多生育期累积GNDVI建立的产量预估模型精度最高,且决定系数R2达到了0.87,实现对玉米估产的同时也证明了多光谱遥感估产的可靠性,但不足之处是构建的估测模型是简单的一元线性模型,可以使用机器学习和深度学习算法建模提高模型精度。后来的研究大多围绕机器学习算法展开,如严海军等[13]挑选各生育时期相关性较好的5种植被指数,以去除土壤噪声后的5种植被指数和作物表面模型提取的苜蓿株高为输入变量,通过支持向量回归算法建立各生育时期的苜蓿产量预测模型,结果发现,在初花期使用植被指数和株高组合输入变量所构建的估产模型最优,其决定系数R2为0.90,实现了苜蓿产量快速、准确的估测。卞朝发等[27]筛选出了3个与小麦产量相关性较高的机器学习算法,并将关键生育期与小麦产量呈极显著相关的植被指数(ESCVIs)分别与3种机器学习算法结合,建立关键生育期的3个小麦估产模型,研究发现,在开花期和灌浆期,高斯过程回归(GPR)模型与ESCVIs结合效果最好,为最优模型,决定系数R2为0.88。并且经过该模型的估测产量与实测产量进行比较,发现该模型在不同尺度上具有较强的适应性,实现了大田尺度下的小麦产量估测,对小麦的种植规划以及农业生产具有重要的现实意义。运用无人机多光谱遥感技术进行作物产量的精准估测,为解决我国粮食安全问题提供了便利的技术条件。
3 农作物灾害监测
农作物生长很大程度上受到天气条件的影响,而自然灾害是无法避免的,因此,能做的就是对农作物的灾情进行监测从而达到减少灾情、预防灾情的目的。目前研究涉及的灾害主要有涝灾、倒伏、杂草识别和病虫害等,对灾害监测的研究主要集中在灾情的严重情况分析以及对灾后作物受灾面积的监测。
赵静等[14]采集了多种光谱指数、光谱反射率及纹理特征,总计40余项特征作为样本特征参数,基于全特征集使用支持向量机-特征递归消除算法(SVM-RFE)和Relief算法筛选部分特征作为特征子集,运用支持向量机(SVM)、K-最近邻(KNN)、Cart决策树、随机森林(RF)和人工神经网络(ANN)对特征子集进行监督分类,研究表明,SVM-RFE方法对数据降维效率高于Relief方法,且SVR的建模可以更准确有效地对不同冠层范围下的玉米和杂草加以区分,也因此大大减少了化学除草剂的使用,从而为玉米的田间管理决策提供了技术支持。戴建国等[18]基于倒伏与正常状况下棉花的光谱反射率之间的差异,从无人机影像种提取了多种光谱指数与纹理特征,同时结合花铃期倒伏棉花的实地测量数据构建了Logistic二分类模型,研究发现,通过第一主成分均值和常量建立的纹理模型精确度最高,达到了91.30%,实现了倒伏灾害后棉花受灾信息的迅速收集。赵静等[19]从多光谱影像中提取植被指数、反射率和纹理等特征建立全特征集并用不同算法挑选相关特征作为特征子集,运用不同分类监督模型对风灾后的倒伏玉米数据进行提取并使用混淆矩阵进行评价,研究发现,KNN和ANN模型精度均达到了90%以上,对识别玉米倒伏情况的稳定性较好,KNN模型与SVM-RFE特征筛选相结合的方法分类效果达到最优,实现了台风灾后玉米倒伏信息的迅速准确获取。陆洲等[28]通过分析获取的多光谱遥感影像中正常水稻、受灾水稻的植被指数、光谱反射率以及纹理特征的差异性,构建了基于光谱与纹理特征的决策树分类模型,研究结果显示,组合光谱和纹理特征构建的决策树模型提取倒伏水稻面积的精度最高,Kappa系数达到了0.93。朱文静[29]等探究了空间分辨率对模型反演精度的影响,对不同空间分辨率图像的波段反射率与赤霉病指数及植被指数进行相关性分析,确定了小麦赤霉病无人机多光谱监测的最佳空间分辨率,基于此分辨率运用机器学习算法建模,研究结果表明,SVR回归算法在多源数据融合模型(植被指数和纹理特征)中监测效果最好,为无人机监测区大田作物病害,特别是小麦赤霉病近地遥感监测的分类和变量应用提供了方案。
4 结论与展望
随着精准农业航空领域的发展,无人机多光谱遥感在农业生产中已经得到了愈发广泛的应用。
对于作物表型信息的监测,通常选择相关植被指数与所测农学参数进行Pearson相关性分析,筛选出与所测农学参数相关性较高的植被指数、纹理特征及波段光谱反射率参与建模。目前常用的建模方法主要是线性回归,如逐步回归、偏最小二乘回归(PLSR)、岭回归(Ridge),以及一些常用的机器学习回归算法,如随机森林回归、支持向量机(SVR)回归、bp神经网络回归等。使用决定系数、均方根误差和相对误差等评价指标评判模型精度,从而实现对农作物叶面积指数、叶绿素含量、氮含量的实时监测,并可估测作物产量,从而帮助育种者筛选出高产广适类型的新品种。
对于作物灾害监测,通常采用相关的光谱指数与纹理特征建立特征集,使用机器学习和深度学习监督分类算法(如RF、SVM和ANN等)建立特征模型并利用Kappa评价其空间一致性,实现倒伏、杂草识别、病虫害等灾害后作物情况的信息提取。
目前,无人机多光谱遥感技术仍存在一些不足,各种研究下的作物信息提取模型并不具有普遍适用性,不同生育期、不同地块、不同反演参数的模型各不相同,如何提高模型的适用性是未来无人机遥感研究的重要方向;目前使用的建模方法多是基于统计学方法,基于深度学习的人工智能算法虽然有所涉及但还尚未在无人机遥感领域普遍应用,未来深入研究人工智能算法与无人机遥感相结合是实现精准农业航空的一个重要趋势;农用无人机行业对无人机研发生产的技术标准及安全标准并不规范,因此,应加快制定完善的无人机技术标准,保证未来精准农业航空的健康发展。
