日本发射SLIM,验证高精度月面软着陆技术
2023-11-18肖武平北京空间科技信息研究所
肖武平 (北京空间科技信息研究所)
2023 年9 月7 日,日本在种子岛航天中心使用H-2A 火箭成功发射“小型月球探测着陆器”(SLIM),将演示验证高精度月面软着陆。该任务是日本宇宙航空研究开发机构(JAXA)研制的小型、低成本任务,成本约180 亿日元(约合1.4 亿美元)。除实现工程、科学目标外,JAXA 还希望通过SLIM 的小型化、低成本技术对私营企业开展商业月球探测提供帮助。
1 任务背景
SLIM 任务是日本政府实施的第3 次月球探测任务,以及首次月球软着陆任务。此前,日本政府曾于1990 年和2007 年分别发射了月球环绕任务——“飞天”(HITEN)和“月女神”(SELENE)。在发射“月女神”轨道器后,JAXA 为了继续推动月球探测任务,推进“月女神”的后继计划——月女神-2 和月女神-3,分别进行月球表面软着陆和采样返回任务。由于使用自动控制系统进行月球着陆存在通信延迟等技术难题,为了分散风险,JAXA 决定首先研制进行软着陆的工程试验探测器月女神-B(SELENE-B)。然而,由于成本效益问题,日本宇宙工学委员会于2015 年否决了月女神-B 提案,并由JAXA 制定了成本更低的SLIM 方案。
SLIM 属于JAXA 中型科学及深空探测任务(从研制到发射跨度为3 年),最初计划于2018 年使用“艾普斯龙”(Epsilon)小型固体火箭发射。此后由于多重原因,SLIM 被推迟至2023 年才发射。
2 任务基本情况
任务目标
(1)科学目标
SLIM 任务的科学目标是探寻月球形成的起源。一种理论认为月球是由巨大撞击形成,如果这种假说成立,月幔的大部分成分应与地球相似。一些月球内部物质由于陨石撞击飞逸并暴露在陨石坑内部和周围。“月女神”的重要发现之一就是曾在月表发现了月幔物质暴露的地点,并且据推测,此处的岩石含有被认为是月幔物质的橄榄石。橄榄石是一种在原始月球仍处于高温和熔融状态时由于其高比重而沉入月幔的物质。橄榄石分布在陨石坑口附近,通过对橄榄石的研究,并将其成分与地球上的成分进行比较,有助于探索月球形成和演化的过程。SLIM 将精确着陆在布满橄榄石的区域,对橄榄石的组成进行研究。
(2)工程目标
SLIM 任务的工程目标是通过小型探测器来验证未来探测月球所需的高精度着陆技术。为了实现该目标,将主要验证以下3 项技术。
1)方位自主识别技术。在实现精准着陆前,探测器需要精确判断自身所在位置。SLIM 采用与人脸识别技术相近的“图像匹配导航技术”,通过处理摄像头拍摄的图像,可以识别陨石坑,并将其与内置的月球地图进行比对,高精度地测定自身位置。此外,由于严酷的空间环境,星载计算机处理能力有限,研究人员通过研发高效率的图像处理算法,实现了识别精度和处理时间的双重平衡。
2)复杂地形着陆技术。为了不断拓展科学探测,未来不仅需要探测器在月球平原区域着陆,还需要在斜坡等更复杂的地形上着陆。例如,为了进行陨石坑的地质调查,需要在倾斜的地形进行地质调查。SLIM 将验证适合在倾斜陆地着陆使用的着陆方式和着陆腿。
3)小型化、低成本技术。JAXA 期望通过小型化、低成本技术对私营企业商业月球探测提供帮助。着陆器通过紧凑、简约的整体设计、3D 打印技术以及先进的电池材料技术等将探测器净质量控制在200kg左右。
系统组成
SLIM 净质量仅约为200kg,发射质量约为700 ~730kg,高2.4m、宽2.7m、长1.7m。为了尽可能减轻整体质量,着陆器采用燃料贮箱和氧化剂贮箱一体式箱式结构,并将其作为整个探测器的主体结构。一体式箱式结构干质量约为40kg,主体材料使用钛铝钒合金(Ti-6Al-4V),中间部分外侧包覆碳纤维增强聚合材料(CFRP),确保耐压强度的同时减少重量和厚度。
着陆器下方不同方向安装了两台导航用相机,分别在动力下降和垂直下降阶段使用,可以同时输出用于图像匹配的非压缩图像和用于数据下行的压缩图像。在垂直下降阶段使用微波雷达测量相对于月面的高度和速度,测量范围为数公里至数十米,在更接近月面的阶段使用激光测距仪测距。
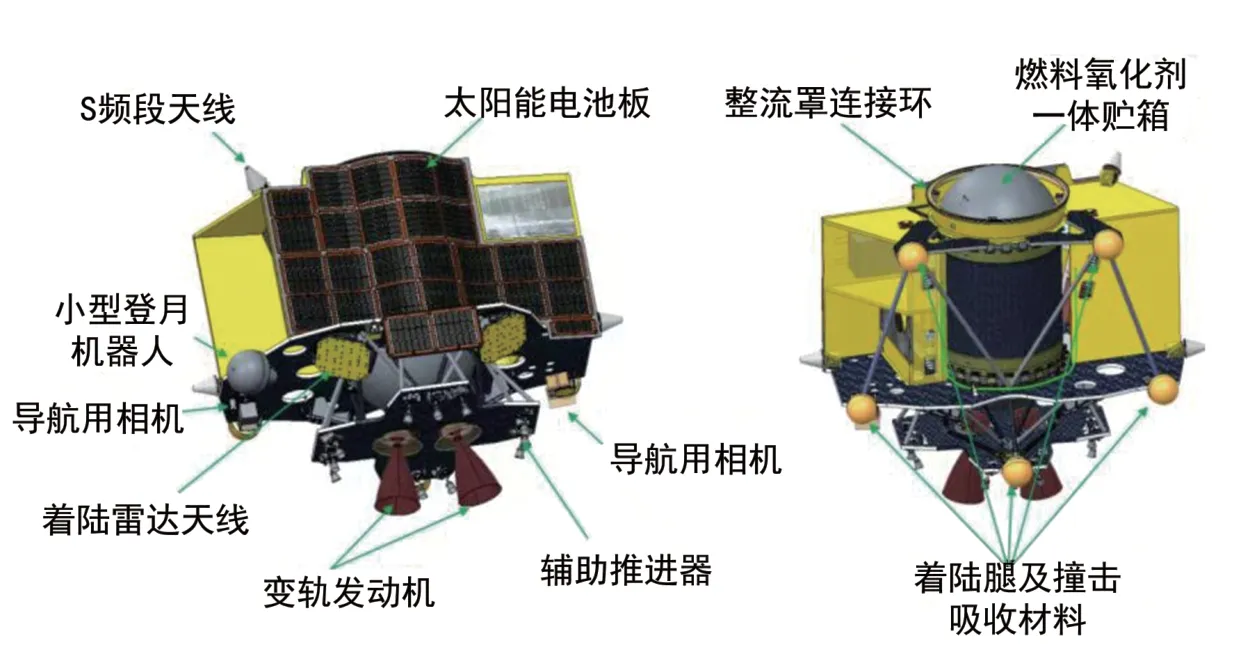
SLIM 结构图
SLIM 的着陆腿是专为“二步式着陆”设计。着陆器共安装了5 条着陆腿,主着陆腿安装在着陆器下部变轨发动机旁边,将在着陆时最先接触月面;安装在中隔板两侧的两条着陆腿被称为“中隔板着陆腿”,较其他着陆腿略高,防止在第二步着陆时由于横向速度过大而发生侧翻;另外两条着陆腿安装在着陆器顶部的整流罩连接环两侧,被称为“前辅助着陆腿”。
有效载荷
为实现任务的科学目标——探寻月球形成的起源,SLIM 搭载了多光谱相机(MBC)和“小型登月机器人”(LEV)两种载荷。
(1)多光谱相机
多光谱相机通过对着陆地点附近橄榄石的反射光进行光谱划分确定其成分。SLIM 在着陆后将无法移动,MBC 配备了自动对焦系统和指向镜,可以在有限的视野范围内仔细观察不同位置的岩石样本。此次是日本首次尝试将自动对焦系统安装在用于行星探测的近红外光谱相机中。
(2)“小型登月机器人”
“小型登月机器人”由JAXA 与日本多所大学联合研制,以履行“去想去的地方,做想做的事情”的目标,通过观测补充探测器的数据。“小型登月机器人”由LEV-1 和LEV-2 组成,具有不同功能。SLIM 在下落过程中距月面约1.8m 高度时,两个机器人与SLIM 分离,并落在月球表面。
LEV-1 使用的通信模块
LEV-1 结构图

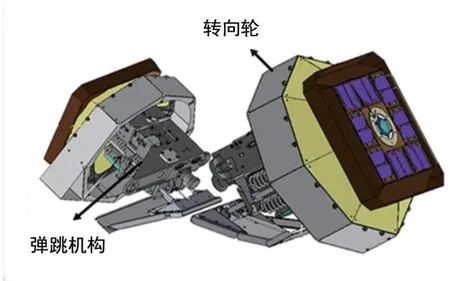
LEV-2 变形前、后示意图及地面行走测试

多光谱相机主要性能指标

“小型登月机器人”着陆及运行方式示意图
1)LEV-1
LEV-1质量为2.1kg,尺寸为26cm×40cm×30cm,活动时长为40min 以上。通过动量储能装置和转向轮,LEV-1 可以实现朝任意方向跳跃移动,穿越不平整的地形和崖壁等障碍。其上搭载了三轴加速度计、温度计、辐射监测器、陀螺仪等记录着陆条件的多种传感器,用于记录自由下落高度、着陆冲击加速度、月面硬度、地面坡度等数据,这些数据在着陆时即将数据传回地球。此外,它还配备了2 个摄像头,用于拍摄着陆器及其周围的图像,可自主评估图像的质量,在移动探测过程中将数据发送到地球。
LEV-1 使用的通信模块质量仅90g,尺寸为60mm×40mm×25mm,最大功率为7.5W,携带S频段和UHF 频段转发器,可与JAXA、美国国家航空航天局(NASA)的地面站以及无线电爱好者间进行通信。
2)LEV-2
LEV-2 质量为0.25kg,直径为80mm,配有带减震装置的车轮,可以向任意方向转向和移动,能够穿越狭窄的位置和复杂的地形。此外,LEV-2 还可作为分离相机使用,从LEV-1 分离后,将拍摄到的探测器本体和周边图像通过蓝牙设备发送至LEV-1。
任务过程
此次任务预计从发射至到达月球轨道将用时3 ~4 个月,在月球轨道上停留约1 个月,目前计划于2024 年2 月进行着陆。SLIM 在发射44min2s 后与火箭分离,进入575km×98000km的月球转移轨道,此后将利用月球引力和太阳潮汐力的两次借力变轨的方式。第一次借力是在绕地球轨道飞行时进行轨道机动,当远地点接近月球轨道的距离时,利用月球的引力提升远地点高度进行变轨;第二次借力是当SLIM掠过月球时,利用太阳潮汐力到达与月球的交会点。
在着陆程序启动前,探测器在600km×15km 的月球椭圆轨道上运行。在该轨道上,地面站将SLIM 的轨道和位置发送至SLIM,SLIM 根据这些信息,在距离月面15km 高度开启主发动机反向点火并切换至着陆程序。着陆程序的第一阶段是动力下降阶段,距月表15 ~3.5km,在该阶段,发动机4 次反向点火、每次约50s 的滑行周期,在此期间将调整相机朝向,对准月球表面,使用相机拍摄月表,通过图像高精度估算其所在的位置和速度,同时重新设计朝向着陆点的轨道。SLIM将通过这种自动控制方式到达着陆点上方。第二阶段是垂直下降阶段,距月表3.5km ~0m,SLIM 到达着陆点上方后就几乎垂直下降,同时用雷达探测高度,到达300m 左右时,进行“障碍物检测”,并根据着陆器正下方障碍物情况进行水平位置微调。距月表约3m 时,探测器会在控制姿态的同时关闭主发动机并着陆。
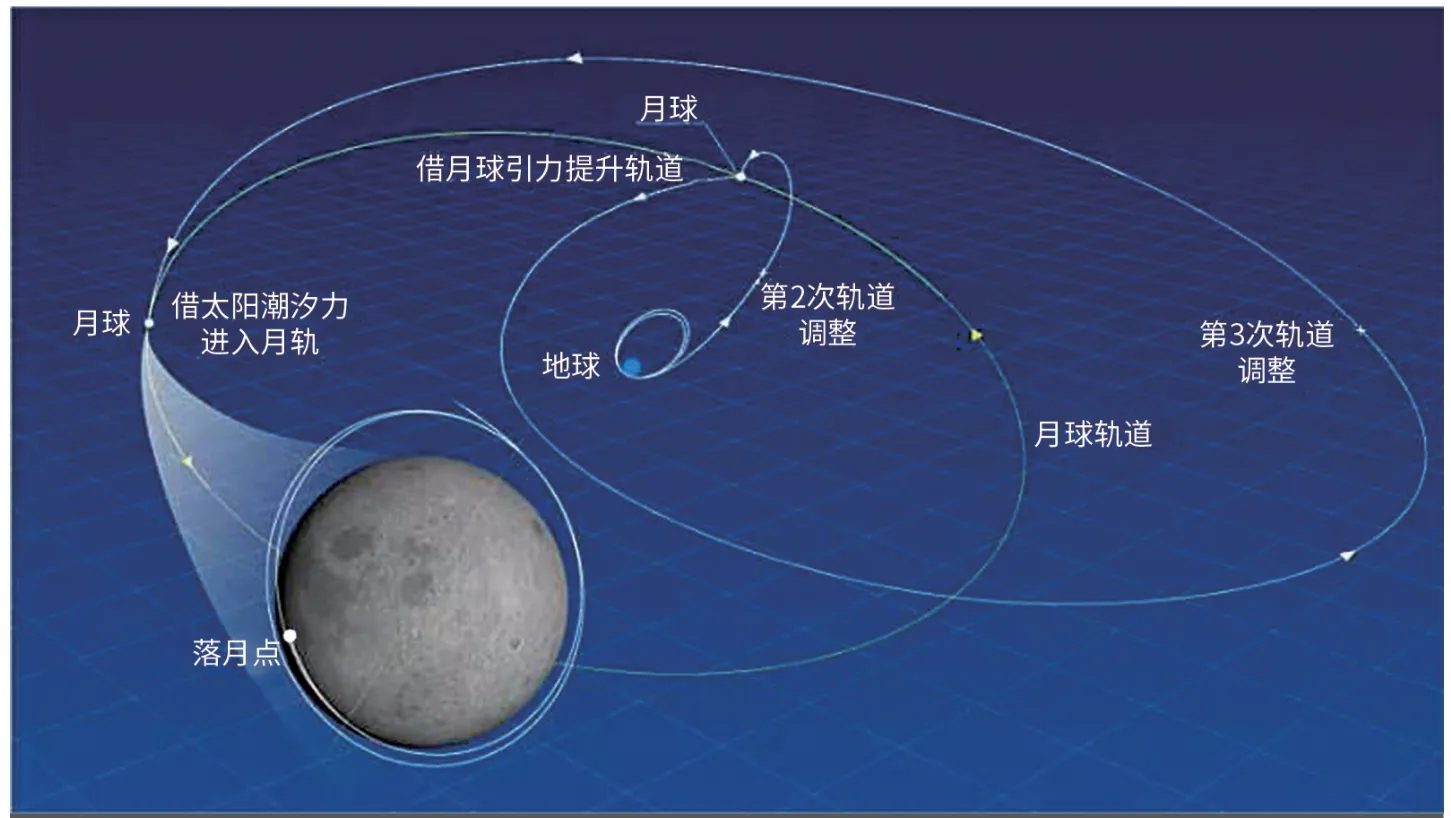
通过两次借力变轨的方式到达月球轨道

SLIM 动力下降阶段以及垂直下降阶段示意图
为了在着陆时使着陆器不容易翻倒,SLIM 使用一种称为“二步式着陆”的全新着陆方式。在接近着陆点时,通过图像识别技术避开地面上的障碍物,垂直下降到着陆点上方约3m 左右。然后使用位于侧面的发动机使着陆器姿势向前倾倒,并保持这种姿势继续下降,直至最下方的主着陆腿触地。此时,发动机产生的推力仍会产生向前速度,主着陆腿接地后着陆器仍会继续向前倾倒,最后安装在着陆器侧面的辅助着陆腿触地并使姿势稳定,着陆完成。第一步是主着陆腿触地,第二步是探测器侧面的辅助着陆腿触地,这种着陆方式被称为“二步式着陆”。

“二步式着陆”过程
3 任务特点分析
首次演示验证高精度月面软着陆
目前,地外天体着陆器尚无在较大的天体表面进行优于1km 精度着陆的先例,传统月球着陆器的着陆精度在数千米到十几千米之间。小行星采样返回任务曾实现了精确着陆,包括日本的“隼鸟”(Hayabusa)和隼鸟-2 等任务,但实施难度完全不同,小行星重力比月球小几个数量级,探测器可以缓慢接近并在需要时重新上升,而月球着陆则需要一次完成,并且着陆过程中探测器调整轨道的能力有限。SLIM 将全球首次演示验证高精度月面软着陆技术,JAXA 希望通过任务的成功实施,实现从“在安全的地方着陆”到“在需要的目标地点着陆”的转变。
SLIM 如果成功着陆月球,日本将成为继苏联、美国、中国、印度之后第五个在月球实现软着陆的国家。通过实现月面软着陆,日本可以展示其在航天科技领域的实力和技术水平,增强国际社会对日本的认可。
着陆地点情况复杂,考验着陆技术
此次着陆点位于月球赤道南侧名为“酒神之海”(SHIOLI)陨石坑的附近区域。“酒神之海”为一个直径约300m 的陨石坑,陨石坑内及周围有大量“橄榄石”,适合安全着陆的地点十分有限,以往的月球探测器很难在这种布满障碍物的区域着陆,因此要安全着陆需要高精确软着陆技术。
为了保证着陆的精确性和安全性,SLIM 采用自主方位识别技术实现高精度测定自身位置,并且通过高效率的图像处理算法,实现了识别精度和处理时间的双重平衡;为了适应在斜坡等更复杂的地形着陆,SLIM 使用了新颖的着陆方式和适应此着陆方式的着陆腿。
通过多种方式减轻着陆器质量
目前,成功进行月面软着陆的探测器均为发射质量大于1t 的探测器。分别于2019 年和2022 年尝试进行月面软着陆的以色列“创世纪”(Beresheet,发射质量为585kg)和日本的ispace 公司研制的“白兔-R-M1”(发射质量1000kg),两者都在着陆阶段以失败告终。SLIM 发射质量仅约700kg,干质量仅约200kg,并且还携带了两个小型登月机器人,如任务成功,SLIM 将成为最小的成功登陆月球的着陆器。
SLIM 主要通过以下4 种方法减轻探测器的整体质量:
1)设计了利用月球引力和太阳潮汐力的两次借力变轨的方式,尽可能减少燃料的使用。
2)整体设计方面,将燃料贮箱和氧化剂贮箱合为一体,并将一体式储箱作为整个航天器的主体结构;将卫星的数据处理系统、姿态轨道控制系统和电源系统的电气组件集成到“系统集成模块”(SMU)计算机和电源装置“综合电控模块”(IPCU)中,实现了小型化和节电的目标。
3)专门为“二步式着陆”设计了结构简单、轻质的着陆腿。以往的月球着陆器,如“阿波罗”(Apollo)等,大多是通过带有“关节”(连杆机构)的着陆腿来吸收冲击力,尽管这种方式安全性很高,但会使着陆器的着陆腿变得复杂且笨重。SLIM 采用了全新的着陆腿设计思路,使用三维堆叠3D 打印制成的简单多孔结构作为着陆腿的主体材料,多孔结构通过被压缩来吸收落地时的冲击力。
4)使用3D 打印技术、先进的电池材料技术等减轻着陆器的整体质量。采用高效薄膜轻质太阳能电池、SUS 层压型锂离子二次电池等方法减轻着陆器的整体质量。
着陆方式及着陆腿设计新颖
“二步式着陆”以及着陆腿的新颖设计,在实现小型化、轻质化的同时,SLIM 兼顾了安全性,具体有以下几个特点:①相比于连杆机构的着陆腿,SLIM 的着陆腿结构简单且轻质;②由于首个接触月面的主着陆腿已确定,因此可以仅根据主着陆腿的受载条件进行高强度设计,而不需要让所有着陆腿都具有相同的强度,从而减轻质量;③由于着陆器的着陆姿势是倾斜状态,可以使倾斜方向与月面斜坡方向匹配,最大程度减少在斜坡上倾倒的风险(最大可以在15°倾斜面着陆),这种方式更适应在斜坡等复杂地形着陆。
4 几点启示
高精度着陆是未来月球探索和人类驻留关键技术之一
尽管人类已经实施了多次月球探测任务,使月球成为人类最熟悉的地外天体,然而过往的着陆任务往往受限于着陆精度的约束,通常选择在大范围平坦区域进行着陆,限制了进行月球探索的范围。而随着月球探测的深入,陨石坑边缘、布满障碍物的高科学价值区域已经越来越受到科学家的关注。这些地区可能蕴藏着更多关于月球地质、地球与月球共同演化以及太阳系早期历史的宝贵信息。然而,由于这些地区的地形复杂性和不规则性,传统的着陆技术很难在这些区域实现精确着陆,因此需要高精度月面软着陆技术来克服这一挑战。同时,提高月面软着陆精度,将使多个任务可以在互不影响的情况下在同一片高价值区域进行探测,将促进人类的月球探测活动。
小型化、低成本技术对推动商业探测具有重要意义
商业月球探测的发展离不开需求的驱动和商业模式可行性的支持。其中,对于商业月球探测的需求随着近年来“阿尔忒弥斯”(Artemis)计划和各国政府对月球探测的关注,正在不断扩展;而商业模式可行性需要能够实现可盈利的目标,各私营企业在不断扩展服务类型、增加经费来源的同时,也在推动低成本技术的发展。但小型化和低成本往往会对设计冗余、可靠性带来不利因素,发展兼顾安全的小型化、低成本技术在于推动商业探测发展关键技术。JAXA期望通过SLIM 的小型化、低成本技术对私营企业商业月球探测提供帮助。JAXA 在技术转移方面进行过诸多努力,此前将H-2 火箭的研制和发射技术转移至三菱重工业股份有限公司(Mitsubishi Heavy Industries),将技术试验验证卫星-8(ETS-8)转移至三菱电机株式会社(Mitsubishi Electric),并将其成功改进为目前日本大型卫星通用平台DS2000。因此,SLIM 验证的相关技术有望推动日本商业月球探测的发展。
