基于5G通感一体化的车辆成像跟踪方法
2023-11-18张千坤陈任翔钟志刚马广辉孙志远中讯邮电咨询设计院有限公司北京100048
张千坤,陈任翔,钟志刚,马广辉,孙志远(中讯邮电咨询设计院有限公司,北京 100048)
1 概述
随着信息技术日新月异,信息技术、移动通信技术、人工智能与大数据技术的深度融合,通信业务要素从人向智能体、物理空间和虚拟空间要素扩展,信息处理功能需求从信息传递向信息采集、信息计算扩展。移动互联网和物联网业务不断增强,AI 业务、沉浸式业务和数字孪生业务不断涌现,正广泛渗透到个人应用以及智能制造、智能交通、智慧能源、智慧医疗等垂直应用领域。上述业务无一不依赖着通信感知一体化技术的应用。
6G 网络即将到来,预期将是移动通信网络、感知网络和算力网络的融合体,而感知网络是指具有目标定位[1](测距、测速、测角)、目标成像[2]、目标检测[3]、目标跟踪[4]和目标识别[5]等能力的系统。本项目基于通信感知一体化技术,面向未来的智慧交通、智能驾驶领域,研究基站侧的室外动目标检测与成像系统,为通信感知一体化技术在智慧交通、智能驾驶等领域的应用提供技术基础与理论支撑。
目前面向交通领域的动目标检测与跟踪有基于光学摄像头[6],基于雷达回波[7]及基于无线信号[8](华为通感一体技术)的方案。基于红外设备与光学摄像头的动目标检测方案,易受雨、雪、雾等环境因素影响,对背景环境要求高[9]。华为基于无线信号的动目标检测与跟踪方案,利用多通道MIMO 天线波束差分技术,得到极窄的波束,利用反射回来的信号进行目标检测与跟踪。该方案需要全双工天线,利用极窄波束的扫描获取不同角度下的动目标的反射信号强度与信号时延,结合波束角度得到目标位置,进行目标跟踪。然而由于擦地角的限制需要对地面进行标定后,才可实现准确的动目标检测与跟踪功能。
基于此,本文提出一种基于成像的目标跟踪方法,基于逆合成空间雷达成像理论的机理[10],在只有单通道的时候,即可实现对动目标的成像。同时在短时间内获取多帧ISAR图像,实现类似视频的动态成像功能。基于多帧ISAR图像,提取目标的特征信息可实现动目标的跟踪功能。同时利用该信息可扩展目标识别功能,区分卡车、汽车、自行车等类别,为智慧交通的应用落地提供更丰富的感知信息。
2 系统方案设计
室外动目标检测与成像跟踪整体系统方案如图1所示,整体可分为3个模块,分别为参数估计与提取模块、动态ISAR成像模块和多帧成像结果跟踪模块。
图1 动目标检测与成像跟踪的系统方案
参数估计与提取模块负责估计动目标运动参数。该模块首先利用多普勒域的零频滤波技术滤除通感信号中的背景与静止目标,抑制多径信号,然后结合恒虚警检测技术在目标一维距离像进行动目标检测,利用目标一维距离像信息提取目标距离-时间图,再结合距离公式进行非线性拟合获取目标的速度信息。然后利用ISAR 参考相位将信号处理转换为ISAR 成像处理,再结合稀疏参数估计方法获取目标的运动参数。
基于该参数,动态成像模块拟合构造误差相位补偿运动误差,再结合波数域二维插值映射建立多目标的分布式成像模型,随后利用CADMM 优化框架[11]获取多目标的全局优化成像结果,最后利用多段子孔径回波获取多帧的ISAR成像结果。
成像跟踪模块利用动态ISAR 成像获取的多帧成像结果进行目标跟踪。该模块分为检测与跟踪2个子模块。检测模块首先使用高斯混合模型分离背景得到运动区域,然后对该区域进行形态学运算,消除噪声,最后计算目标的质心和边界框坐标等特征信息。跟踪模块使用特征信息初始化卡尔曼滤波器[12],使用卡尔曼滤波器计算并预测每个轨迹在下一帧中的位置,然后使用匈牙利算法[13]对下一帧中新检测到的目标进行匹配更新与跟踪。
3 动目标检测与成像跟踪
3.1 系统回波模型
位于道路一侧的基站天线发射5G上行信号,发射信号经由目标反射后被基站侧接收天线接收,天线配置为一发一收(One Transmitter and One Receiver,1T1R)且同侧收发分置天线。信号经过调制解调后可获取信道状态信息(Channel State Information,CSI),信号模型如下:
其中,f为信号载频,n为信号包数,I为多径个数,ai为第i条路径的信号强度,Ri为第i个路径对应散射点到基站天线的距离(对于动目标而言,该距离是时变的),c为信号传播速度。
基于雷达探测感知的概念,忽略信号空间传播损耗,上述信号模型可改写为:
其中,Sm(f,t)为运动目标的回波信号,可表述为:
其中,t为回波时间(慢时间),Om为动目标所在区域,δm为位于(x,y)位置处散射点的目标散射强度,(xt,yt)为动目标点(x,y)在t时刻的位置,Rm(xt,yt)为t时刻位于(xt,yt)位置处散射点到基站天线的距离,表示矢量的欧式距离,式中基于远场假设与掩叠理论忽略了目标的高层信息。
此外,Ss(f,t)为静止散射点的回波信号,可表述为:
其中,O为波束照射区域,δs(x,y)为位于(x,y)位置处静止散射点的目标散射强度,Rs(x,y)为位于(x,y)位置处静止散射点到基站天线的距离。由于静止散射点到天线间的距离固定,静止散射点的回波信号不存在多普勒信息。因此,可在慢时间域采用零频滤波技术滤除CSI中静止目标信息。
3.2 动目标检测
根据式(4)可知,由于静止散射点到天线间的距离固定,静止散射点的回波信号不存在多普勒信息。而动目标由于和天线间存在相对运动,导致回波信号中存在多普勒信息。
因此,基于多普勒信息即可实现对动目标的检测。本系统使用雷达检测中最为常见的恒虚警率检测器(Constant False Alarm Rate,CFAR)进行动目标检测[14]。均值类CFAR 最先被提出并且实际应用最广、最重要,其核心思想是将参考窗均值的处理结果作为背景功率水平估计,与门限乘积因子相乘得到检测门限,经过比较得到有无目标的判决。
图2 是均值类CFAR 的原理框图,其中xi(i=1,2,...,N)表示参考窗内N个采样值,N为参考单元数,即参考窗长度;灰色方块为待检测目标两侧的保护单元,其功能是防止目标拓展到邻近单元影响目标检测;X和Y分别为前后参考窗内采样值的均值;α为门限乘积因子;Z为通过均值X和Y估计得到的背景功率值;T为检测门限;D为待检测单元的采样值。根据奈曼皮-尔逊准则的似然比检验可对其进行如下判决:
图2 CFAR检测框图
即当待检测单元的采样值大于检测门限时,假设H1成立,判决该单元存在目标,反之判决为无目标存在。
3.3 动目标参数估计
为方便分析相位信息,这里给出目标运动的线性形式:
本方案针对动目标的速度和加速度2个运动参数进行估计,t时刻动目标到天线的瞬时距离可写为:
由于本系统使用的是OFDM 信号,该信号在发射前,需进行一次快速逆傅里叶变换(Inverse Fast Fourier Transform,IFFT)处理。因此获取的信号在快时间域已进行距离压缩处理,如图3(a)所示。
图3 动目标回波信号幅值展示
图3 中的距离为差分距离,是减去场景中心到雷达的参考距离后的结果。而结合傅里叶变换进行多普勒压缩后,获取目标的距离多普勒图则如图3(b)所示。目标的距离多普勒图和传统的ISAR 距离多普勒成像算法的原理一致,但由于目标多普勒频率的解析式位置无法获取目标在场景中准确的二维位置,且由于该方法中存在较多近似,成像结果中存在几何畸变。因此需要进一步的成像处理,获取精细成像结果,后续章节会详细地展开描述。
由于发射信号带宽已知,因此在距离向的分辨单元大小已知,考虑到项目中给出的几何模型,可以估计出车辆在距离向上所占的距离单元个数,利用已知的距离窗个数作为参考窗。对距离压缩信号后的信号分别进行滑动相关,由于相关与卷积之间存在信号反转的关系,所以可以使用FFT加速运算,具体方式如下:
其中,s(n)为接收的回波信号,g(-n)为给定长度的矩形窗,⊗为时域卷积,R(n)为相关信号。利用目标距离信息结合每一帧成像后获取的目标位置信息进行非线性拟合处理,即可解算出目标的速度、加速度等相关参数信息。
3.4 动目标成像
动态ISAR的成像原理如图4所示。
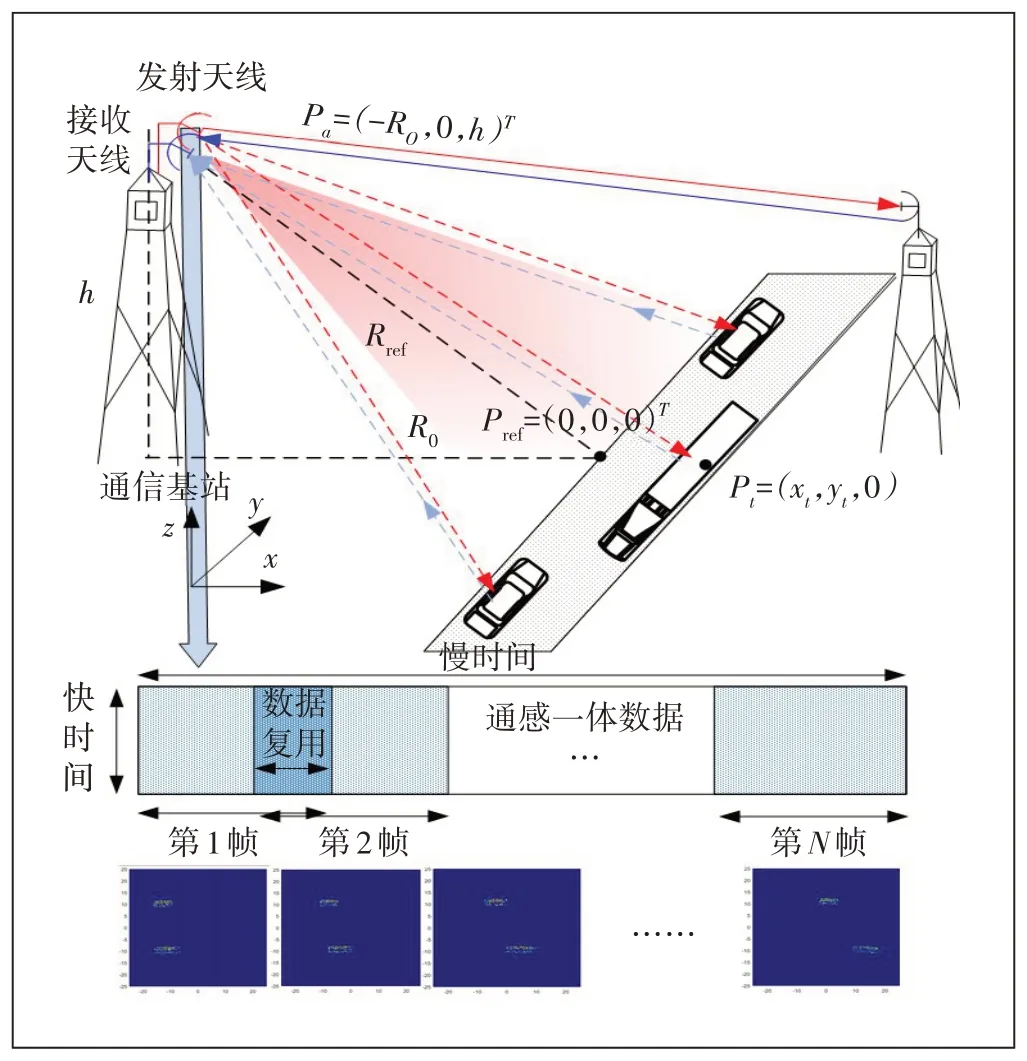
图4 动态ISAR动目标成像系统示意
根据式(6),结合ISAR 成像几何模型,建立ISAR成像回波模型,如式(9)所示。
利用匹配滤波思想可得目标的散射强度信息:
基于子孔径快速成像技术,动态ISAR可获取视频化的多帧二维成像结果,相较于基于雷达微动特征的感知与识别方法,动态ISAR获取的视频化成像结果样本特征维度更丰富,目标检测与行为识别的精准度更高。
回波信号与参考点信号进行匹配滤波后,获得的距离压缩输出信号可用式(11)表示。
利用匹配滤波思想可得:
因此,对于成像区域的每一个像素,计算出在对应的合成孔径时间内与ISAR每个位置的时延后,在距离压缩后的数据矩阵中找到相应的累积曲线,再结合一维插值技术,沿此曲线将所有信号进行叠加,得到这个像素的能量和,即可逐回波实现该点目标散射强度重构,具体流程如图5 所示。而获取成像场景中网格点的回波数据基本思路如下,根据雷达与网格点距离获得相对于参考点的时延长度,在时域回波数据中找到对应回波数据。但存在难点即雷达与网格点距离所对应的回波数据与实际回波采样点的数据几乎不会重合,无法直接从实际回波数据中获得其对应网格点的值。
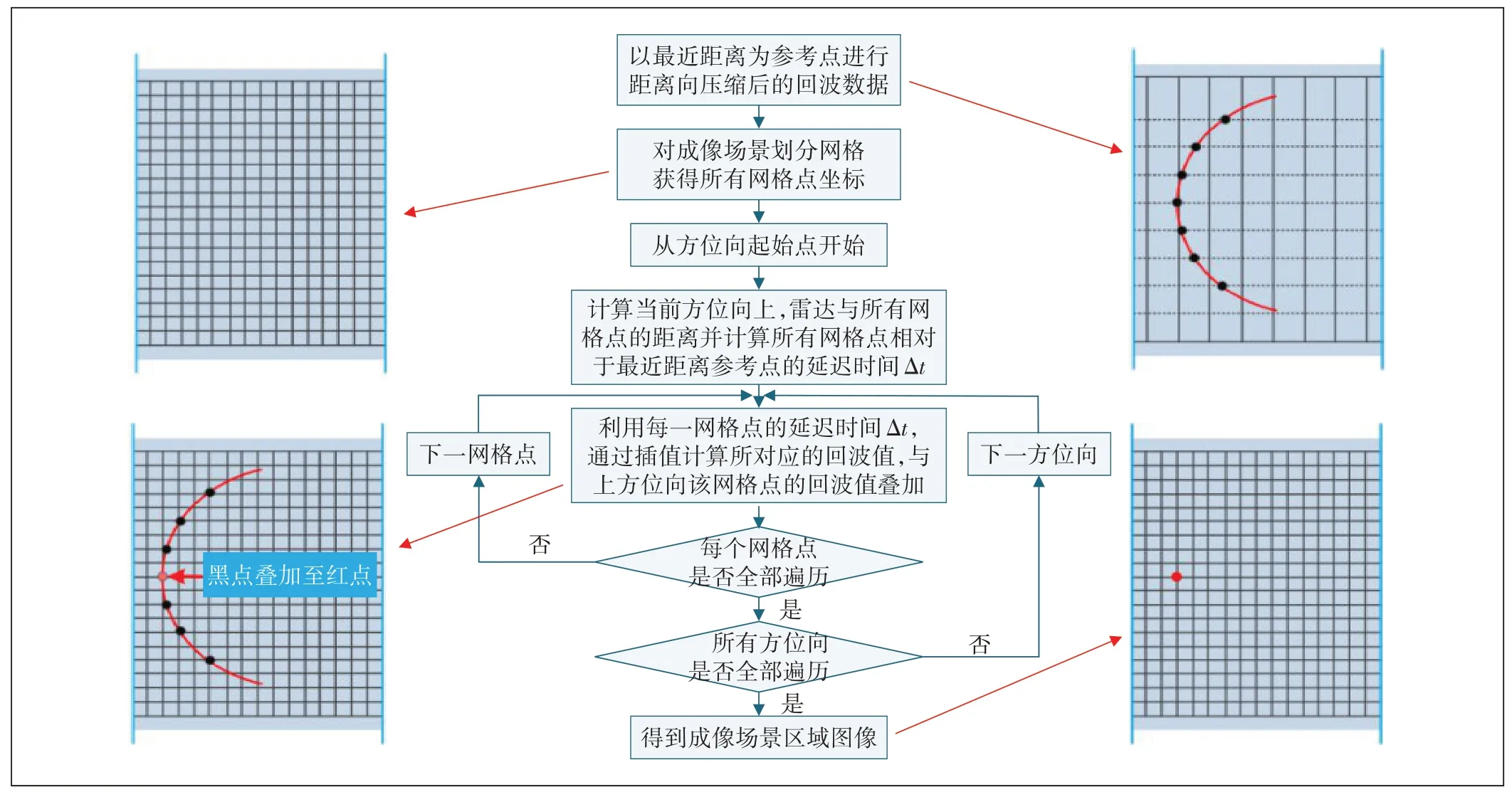
图5 算法处理流程
本算法使用的是计算量较少的最近领域插值算法,原理如图6所示。
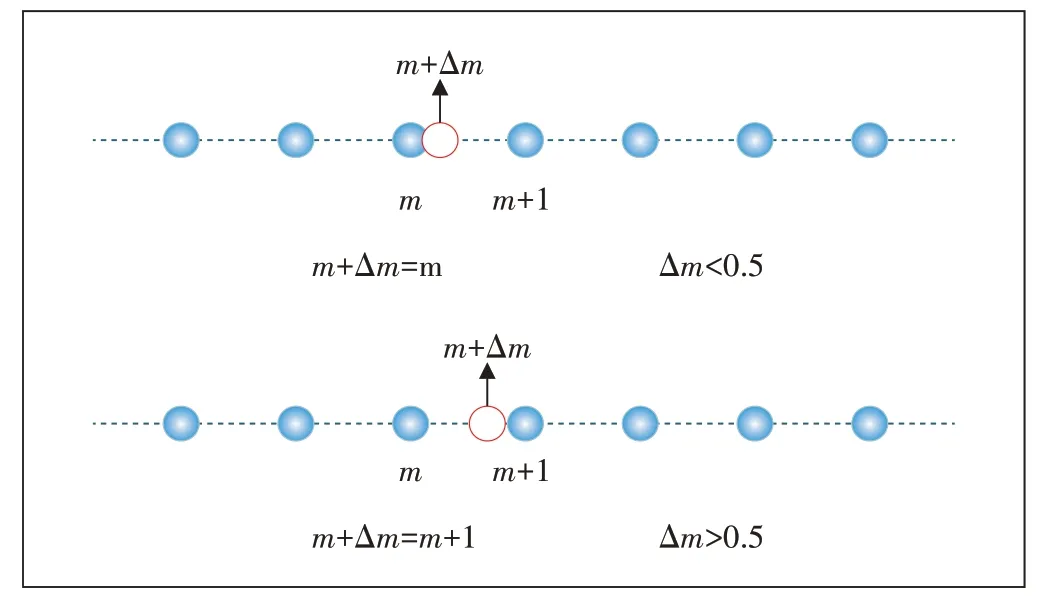
图6 最近邻域插值展示
3.5 动目标跟踪
多个动目标的跟踪流程主要分为2 部分,一是目标检测,二是目标跟踪。目标检测时,首先使用基于高斯混合模型的背景减法[15]建立背景模型,分离背景得到运动区域,即目标。每个混合高斯模型由K个加权的高斯分布线性叠加而成。权系数越大,那么这个数据属于这个高斯分布的可能性就越大。然后对检测到的目标进行形态学运算,消除噪声。最后使用函数进行blob分析返回目标的质心和边界框坐标等特征信息,完成目标检测。
目标跟踪时,首先使用已经得到的特征信息初始化卡尔曼滤波器,使用卡尔曼滤波器计算并预测每个轨迹在下一帧中的位置。然后使用匈牙利算法对下一帧中新检测到的目标进行匹配,即计算预测的位置和每个新检测到的目标之间的欧几里得距离,将结果作为损失函数矩阵,再使用匈牙利匹配算法计算得到已分配的轨迹和目标对、未匹配的轨迹、未匹配的目标,最后更新信息,即将已匹配的轨迹更新到当前帧中匹配成功的目标的位置,将达到阈值的未匹配的轨迹删除,为未匹配的目标创建新轨迹。
4 仿真验证
按照图4 的环境构造仿真环境,将车辆的CAD 模型拆解为上万个小三角面,然后获取每个散射点三维位置,如图7所示。
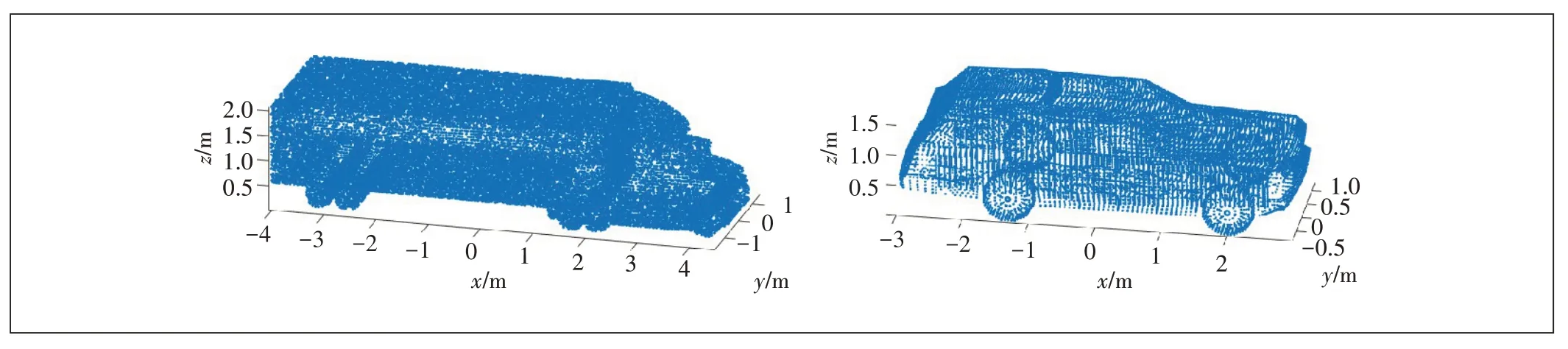
图7 运动目标散射点三维位置
根据式(1)生成回波信号,具体仿真参数如表1所示。

表1 动目标成像跟踪系统参数设置
首先进行邻频滤波,在信号的距离域进行CFAR检测即可检测到观测场景中有没有出现运动目标,检测结果如图8 所示,其中虚警率设置为0.01,信噪比为0 dB。
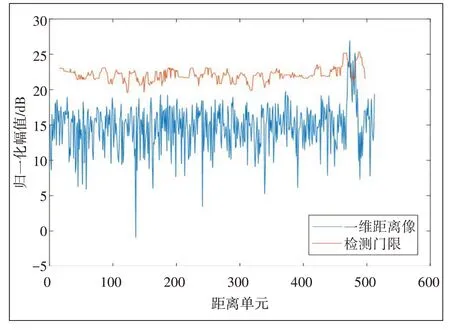
图8 距离域CFAR检测结果
图8 中的蓝色线条为目标的一维距离像,红褐色线条为检测门限,当目标的归一化幅值大于检测门限时,即可判定场景中存在动目标。因此,调整信噪比后的检测精度如图9所示。
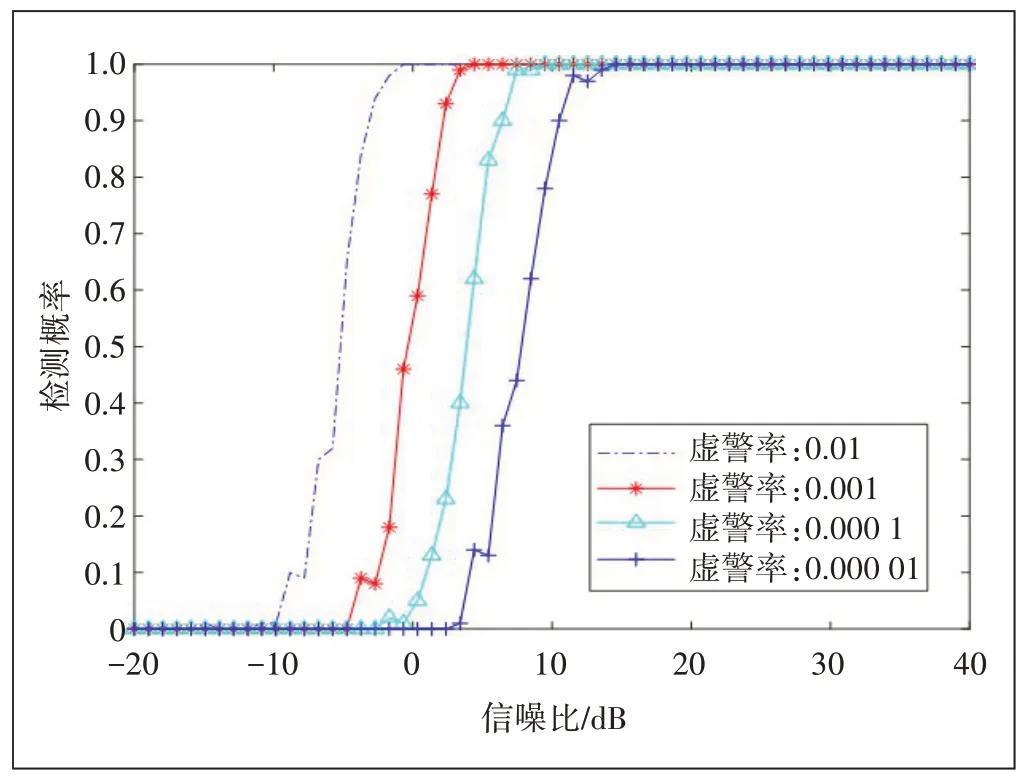
图9 不同信噪比与虚警率下的动目标检测精度
从图9可以看出,在预设参数情况下,检测精度已大于99%,对比不同信噪比下的检测精度变化可以发现,信噪比越好检测精度越高。
ISAR 成像系统参数设置如表2 所示,成像结果如图10所示。

表2 ISAR成像系统参数设置
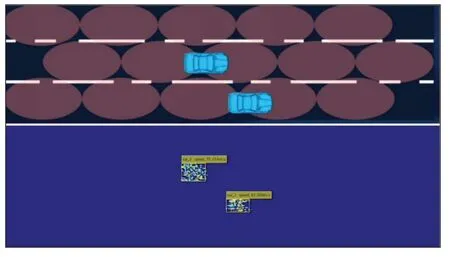
图10 基于通感一体化的成像
基于ISAR 成像的多目标跟踪主要基于卡尔曼滤波器,首先检测出图像中的运动目标,使用混合高斯模型进行背景建模,分离出背景和运动目标。然后对运动目标进行形态学操作以滤除噪声。在多目标跟踪中,需要处理目标匹配的问题,即当前帧中已经存在的运动目标,它们的运动轨迹和下一帧中检测出的新运动目标之间的匹配问题。如果能够匹配成功,那么这个新目标就属于这个运动轨迹;如果没有匹配成功,那么就为这个新目标创建一条新的轨迹。
5 结论
通信与感知融合可基于移动通信基础设施实现行业一网多能。可在满足通信业务要求的前提下实现感知业务,一方面支持更丰富的应用,提高网络资源的利用效率,另一方面可以通过感知为网络智能提供基础支撑能力。本文面向智慧交通领域,提供了一种基于成像的车辆跟踪方法,一方面解决了通感一体化技术在单通道情况下无法对目标进行准确跟踪的难题,另外一方面可以通过成像技术获得更丰富的感知信息,识别车辆的形态,未来将继续加强成像精度的研究,为通信感知一体化技术在智慧交通、智能驾驶等领域的应用提供技术基础与理论支撑。