基于船舶碰撞危险度的内河船舶避碰决策研究
2023-11-16刘东
刘东
(山东省济宁市交通运输综合执法支队,山东 济宁 272000)
随着水上交通的增长,内河航道的航行环境变得更加复杂和拥挤,船舶碰撞风险增加(如图1)。航道的水位变化、宽度、通航密度和水深的季节性变化,以及跨江大桥的增多,都加大了船舶的安全操控难度。降低船舶碰撞风险已成为航运安全的重要挑战。本文应用时间碰撞危险度(TCPA)和空间碰撞危险度(DCPT)评估内河船舶的碰撞危险,并优化碰撞危险度算法,快速准确地计算碰撞危险度。进一步建立船舶自动避碰决策模型,旨在降低碰撞风险、提高航运效率。

图1 长江入海口附近海域通航情况
1 船舶会遇态势阶段划分
内河航行的船舶会遇态势可分为对遇(F)、交叉相遇(A、B、E)和追越(C、D),如图2 所示。

图2 基于相对方位角划分的船舶会遇态势
《内河避碰规则》(以下简称“规则”)中对于“直航船的行动”的会遇局面划分为以下四个局面:自由行动、形成碰撞危险、形成紧迫局面、形成紧迫危险,如表1 所示。
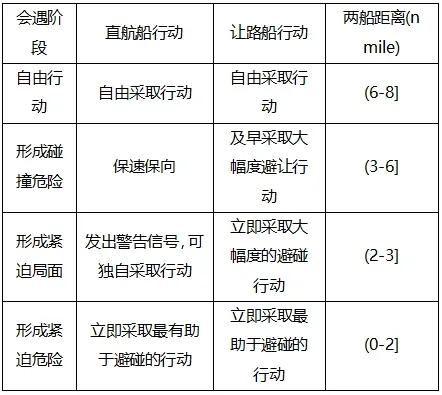
表1 船舶会遇过程中的碰撞阶段划分
在船舶相遇过程中,两船的交会情况不一定遵循预定序列。在特定情境下,可能直接转变为紧迫或高风险场合。船员需迅速评估交会态势,并制定合理的避障策略,以最大限度地降低碰撞风险。
2 碰撞几何原理
在"规则"中,“碰撞危险”一词未被明确定义。船舶碰撞危险的主要判断标准是两船相遇时的最近会遇距离(DCPA)和到达最近会遇距离所需的时间(TCPA)。通常情况下,当DCPA 低于安全会遇距离且TCPA 较短时,应认为存在碰撞危险。船舶碰撞危险度(CRICollision Risk Index)是衡量船舶碰撞可能性大小的量,表示船舶之间不存在碰撞危险,CRI=1,表明两船不可避免碰撞,CRI 介于两者之间时,两船结合实际情况采取适合的避碰行动,具体见图3。

图3 船舶碰撞危险度曲线
2.1 船舶相对运动参数计算
内河航行的互见船舶在会遇中,设本船的地理坐标为(x0,y0),船船速v0、航向C0,目标船的地理坐标为(x1,y1),船航速v1、航向C1,两船距离为D,目标船的相对方位为Tr,船舶相对运动示意图如图4 所示。

图4 船舶相对运动示意图
参考文献[1],根据两船的相对位置和运动学参数,算得两船DCPA 和TCPA 如下:
其中,r 为两船相对速度vr的方向,T 为目标船真方位。
2.2 本船改向后的运动参数计算
两船会遇,我船作为让路船,进行避碰操纵时,目标船保向保速航行,我船只要采取转向操作,船舶的相对运动状态就会时刻发生改变。船舶的DCPA,TCPA 的数值也会发生改变。对于船舶采取的操作措施,应该有效地使得船舶的DCPA 或TCPA 有所增加,使船舶免于碰撞。船舶在采取转向避让行动时的运动参数变化如图5 所示。

图5 转向后船舶相对运动示意图
总之,在船舶避碰决策中,首要任务是对船舶的运动参数进行计算,以准确判断船舶的当前状态和未来可能的动作。该决策应综合考虑船舶的速度、航向、尺寸、转向性能,以及相对航向、相对速度、最近会遇点、海况和环境因素。避碰行动需要遵守“规则”,并结合动态路径预测和船舶间的通信进行调整。高级的避碰决策还可能利用数学模型和算法来预测未来路径并做出更准确的决策。
3 船舶碰撞危险度及模型建立
船舶碰撞危险度的概念尚未在学术界得到严格的定义,部分原因是其模糊性和不确定性特性。虽然海事法庭在案件处理中对两船碰撞危险进行了定性解释,但这仍然不足以阐明碰撞危险度的概念。自1983 年日本学者今津隼马首次对碰撞危险度进行研究以来,学者们提出了多种碰撞危险度的计算方法,其中包括DCPA 和TCPA 加权法、模糊评价法、遗传算法和神经网络法等。本研究采用DCPA 和TCPA 加权法[2]对碰撞危险度进行计算,并根据时间碰撞危险度(TCR-Time Collision Risk)和空间碰撞危险度(SCR-Space Collision Risk)构建了相应的碰撞危险度模型[3]。
3.1 时间碰撞危险度(TCR)
TCR 定义如下:存在碰撞危险会遇两船中的一船驶近到其最晚施舵点的时间上的紧迫程度,设船舶从采取措施时的位置到最晚施舵点处的时间为t1,船舶安全通过时间为t2,TCR 的大小是通过t1、t2和TCPA 的关系来确定的。若TCPA 小于t1,则TCR=1,两船必然碰撞,若TCPA 大于t2,则TCR=0,两船不存在碰撞危险,通常APRA 的量程为12 n mile,两船的距离在12n mile 以上时,认为在时间上不存在碰撞危险。TCR>0 时,表明他船还未驶过最近会遇点,TCR<0 时,表明他船已驶过最近会遇点,令时间碰撞危险度的隶属度函数为utt。
DLMA 表示船舶的最晚施舵距离。即当船舶驶近到即使本船转向90°时,也不能避免碰撞的距离。DLMADCPA为最晚施舵点处船舶的DCPA 值,DLMA 的计算见文献[4]。
3.2 空间碰撞危险度(SCR)
空间碰撞危险度(SCR-Space Collision Risk)的定义是:两船存在碰撞危险的情况下,其中一船基于以下几个主要指标来确定两船发生碰撞的可能性大小:他船的初始最近会遇距离、初始最近会遇距离点的方位、他船相对于本船的相对方位以及两船的最低安全会遇距离。这些指标综合反映了船舶之间的空间关系和碰撞风险程度。船舶的安全会遇距离为d1,船舶安全通过距离为d2,SCR 的大小通过d1、d2和DCPA 的关系来确定,当本船与他船的初始会遇距离小于船舶安全会遇距离时,SCR=1,两船不管怎样采取措施都不可避免碰撞,当本船与他船初始会遇距离大于安全通过距离时,SCR=0,说明两船不存在碰撞危险,若时,SCR的取值范围随着DCPA 的取值变化,令空间碰撞危险度的隶属度函数为udt。
3.3 船舶碰撞危险度模型
利用时间碰撞危险度和空间碰撞危险度计算船舶碰撞危险度,其模型如下:
在船舶避让操作中,核心目标是确保SCR 和TCR的数值低于安全阈值。低于阈值即意味着避让行动是有效的,且两船能够安全地避让对方。
4 船舶自动避碰决策
内河船舶的自动避碰决策是一个复杂的流程,其过程基于“规则”和良好的船艺,通过利用机器替代驾驶员进行决策,它涉及通过船载设备收集和处理关于船舶自身、周围船舶和环境的信息[5],评估碰撞的风险,制定和实施合适的避碰策略,内河船舶自动避碰决策流程是结合“规则”、专家有关知识的基础上,模仿专家采取行动的过程[6]。具体来说,这个过程可以分为三个阶段:航迹保持阶段、避碰阶段、和复航阶段。此外,人为因素在船舶碰撞事故中起着至关重要的作用。自动避碰决策流程可描述为图6,该流程主要包括:

图6 船舶自动避碰决策流程图
(1)在航迹保持阶段,船舶需实时评估与其他船的相对位置和运动状态,判断潜在碰撞风险。如有碰撞危险,转入避碰阶段采取措施;若无,继续按原航线航行。
(2)实施避让措施后,需判断本船与他船是否避免了碰撞风险。如已避免,避碰结束;如未避免,继续避碰行动。
(3)在复航阶段,需持续评估与他船的相对状况,判断潜在碰撞风险。如有碰撞危险,中断复航,重新进入避碰;若无,继续复航至原航线。
图6 展示了避碰决策流程,船舶自动避碰决策体系涵盖了信息采集、信息处理、碰撞危险度确认、避让措施选择、复航时机和应急预案等环节,可全面模拟实际海上情况,确保船舶安全行驶。
在内河中,船舶的有效避让方式主要有三种:仅依靠转向、仅依靠变速、以及转向和变速的结合。当两船在内河中相遇存在碰撞危险时,应该按照如图7 所示的流程寻求本船的有效避让行动方案:

图7 有效避让行动方案流程
在图7 中,我们根据本船和他船的初始运动状态数据以及《内河避碰规则》判断本船在会遇中是直航船还是让路船。若本船是直航船且他船已采取有效避让行动,本船应保持航向和航速不变。若本船是让路船或他船未采取有效避让行动,需要制定本船的避让方案。
5 结语
船舶避碰决策是避碰理论的核心和难点,对实现船舶自动化至关重要。通过使用碰撞危险度指标,可以构建自动避碰模型。根据碰撞危险度的程度,驾驶员能采取相应的避碰行动。利用TCPA 和DCPA 的相对隶属度函数,可以计算碰撞危险度。基于自动避碰流程,能建立自动避碰决策模型,并确定避碰行动的时机和幅度。