浅谈一种车载电动调平支腿设计
2023-11-15宋振越曹秀芳侯晓亭
宋振越,曹秀芳,侯晓亭
(南京晨光集团有限责任公司,江苏 南京 210006)
对于现代化特种车辆,例如,雷达车、火炮发射车、抢险救援车、野战医疗车等,车上通常搭载有许多高精度设备。这类设备工作前,通常需要先对车载平台进行调平以对其提供一个良好的基准平面。当车辆到达预定位置后,车载平台调平动作及设备工作结束后车辆撤收所需时长是极其重要的技术指标,对提高整车机动性能、及时捕捉战机、赢取作战的主动性至关重要。作为调平动作的执行机构,调平支腿根据驱动形式通常可分为电液调平支腿和电动调平支腿。对干电液调平支腿,系统需单独配备液压能源,存在维护和保养要求高、系统响应慢、容易因泄漏导致平台精度难长时间保持等不可忽视的缺点。电动调平支腿由电机直接驱动,结构简单、维护方便、能够长时间可靠锁定,符合调平工况的使用要求。本文介绍了一种车载电动调平支腿,能够实现车载平台的快速调平/撤收动作。
1 主要技术指标
(1)调平支腿能够承受轴向动载荷200kN,静载荷300kN,冲击载荷510kN;(2)调平支腿收拢长度:≤1384mm;(3)有效行程:≥600mm;(4)空载伸出速度:≥149.8mm/s;(5)负载伸出速度:≥49.9mm/s;(6)24h 内位移变化量:≯1mm;(7)工作温度:-40~70℃;(8)储存温度:-40 ~70℃;(9)具有防霉菌、防盐雾、防砂尘等措施。
2 结构设计及工作原理
车载调平支腿通常通过安装法兰与车辆底盘安装侧板进行连接(如图1 所示),各支腿底部支撑盘距离地面有一定的初始离地高度。以伸出调平过程为例,具体工作流程如下:支腿先按照指令同时空载伸出直至支撑盘撑实地面,随后调平控制器根据安装在底盘上倾角传感器反馈的角度信息执行调平控制算法,继续控制各支腿伸出不同长度直至满足预期调平精度。当精度满足指标要求后,支腿电机制动器对各支腿锁定,保证目标平台当前姿态。

图1 调平支腿安装示意图
为实现车载平台的快速调平/撤收,本文设计了一种如图2 所示通过双电机联合驱动运行的调平支腿。该调平支腿采用“电机+齿轮副+滚珠丝杠副”并联布局的方案,主要由空载电机、负载电机、减速器、离合器、齿轮箱、滚珠丝杠副、缸筒、支撑盘、限位开关等组成。由于负载电机为悬臂形式,为提高整个支腿运行的刚性,在负载电机与缸筒之间设置抱箍结构。齿轮箱两侧及缸筒侧壁设有注油孔,方便使用过程中进行油脂加注。
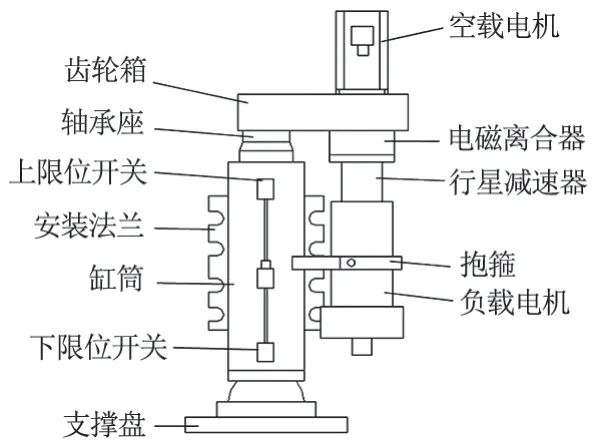
图2 调平支腿外形示意图
该调平支腿采用两个电机分别进行空载和负载的驱动。工作时,电机的旋转运动经传动机构最终转化为活塞杆的直线运动,推动车体平台升降动作直至实现预期平面精度。以伸出过程为例,支撑盘触地前采用空载电机驱动,过程中电磁离合器断开,空载电机的旋转运动无法传递至行星减速器端而经齿轮箱后直接带动活塞杆伸出,当支撑盘运行至距离地面设定位置时,电磁离合器吸合,调平支腿切换为由负载电机提供动力来源,继续进行后续触地前的低速伸出以及触地后的调平动作。
3 选型计算
3.1 丝杠副设计
结合丝杠导程和受力情况,调平支腿最终选用高负载驱动滚珠丝杠副。该丝杠导程为10mm,承受额定静载荷的能力为779.69kN(>510kN),动载荷能力338.57kN(>200kN),满足使用要求。
3.2 传动部件设计
综合考虑调平支腿的结构布局及减速比的设置,总减速比设为16.02,其中齿轮箱的减速比设为2.67,减速器的减速比选择为6。
(1)离合器。离合器选用电磁齿式离合器,设置在主动齿轮与减速器之间。空载电机运行过程中离合器断开,减速器不发生转动;负载电机运行过程中离合器吸合,动力经减速器、齿轮箱传递至丝杠端。
(2)减速器。丝杠端额定输入扭矩:
式中,1F伟调平支腿额定出力,按200kN 计算;hP为滚珠丝杠导程;1η为滚珠丝杠的传动效率,取η1=0.93。
减速器所承受的额定动扭矩:
式中,ig为齿轮副的传动比;η2为齿轮副的传动效率,取η2=0.97。
丝杠端最大输入扭矩:
式中,2F为调平支腿最大静载荷,按510kN 计算。
减速器所承受的最大扭矩:
减速器选用精密行星减速器,额定输出扭矩600Nm(>132.2Nm),额定输出转速3000rpm,最大输出扭矩1800Nm(>337.2Nm),最大输出转速6000rpm,使用温度-40 ~+70℃,防护等级IP65,满足使用要求。
(3)负载电机。调平支腿额定出力时电机的输出力矩:
式中,i为传动机构的总传动比;η为传动机构的总效率,η=η1η2η3=0.875;η3为行星减速器的传动效率,取η3=0.97。
调平支腿应在冲击载荷的作用下保证可靠锁定,按该数值进行电机失电制动器的计算:
根据上述计算,负载电机选用永磁同步伺服电机,该电机由永磁同步电机本体、磁极位置传感器和失电制动器组成。电机额定输出扭矩23.1Nm,1.2 倍过载扭矩27.72Nm(>22.7Nm)。电机配置90Nm(>57.9Nm)失电制动器,性能优良,可以实现调平支腿断电后的自锁功能,所采用的失电制动器适用环境温度范围为-40~+155℃,防护等级为IP67,整体封装在电机内部,满足使用要求。
(4)空载电机。调平支腿空载运行时电机的输出力矩:
式中,3F为空载情况下调平支腿主要克服自身的摩擦力,参考丝杠的设计参数及运动件的摩擦力,取该力为10kN。
空载电机选用永磁无刷力矩电机,电机额定转速1500rpm,额定输出扭矩15Nm(>6.6Nm),设置绝对值编码器。
4 主要特点
4.1 调平/撤收时间短
传统的调平支腿采用单电机作为动力来源,当支腿空载动作时,由于电机的高速旋转运动会经减速器减速,因此无法实现支腿在该过程中的快速运行。本文设计的利用双电机传动的调平支腿,在空载和负载运行阶段可通过不同电机提供动力来源,空载运行时的电机动力通过齿轮箱直接传递至丝杠端,因此可快速实现空载伸缩运动,具有调平/撤收时间短的特点。
4.2 安全系数高
调平支腿在进行结构设计时,留有足够的安全余量,支腿在伸出、缩回两个极限位置设置限位开关,同时负载电机采用多圈绝对值编码器,支腿运行时在上位机程序中设置电机能够运行的极限位置,确保在有效行程内运行。
5 结语
电动调平支腿根据调平控制系统指令,空载运行时由空载电机经齿轮箱、丝杠直接带动活塞杆进行快速伸缩,当带载运行时,电磁离合器吸合,负载电机的旋转运动经减速器、齿轮箱、丝杠转换为活塞杆的慢速伸缩。由于节省了空载运行时间,整个调平/撤收时长大大缩短,极大地提高了车载平台的机动性能,对未来作战具有重大意义。
