精密柔索传动天线座结构设计*
2023-11-14马立波
李 熙,马立波
(1.中国电子科技集团公司第五十四研究所,河北 石家庄 050081;2.北京跟踪与通信技术研究所,北京 100094)
引 言
目前车载天线系统主要以齿轮传动为主。齿轮传动作为一种经典的传动方式有传动平稳、承载力大、结构紧凑等许多优点。然而,齿轮啮合时需要保留一定的齿侧间隙,这将引起传动回差,影响天线的指向精度。通信行业向高频段、窄波束方向发展,对天线传动精度的要求越来越高[1]。精密柔索传动通常采用钢丝绳为传力介质,通过绳轮之间的静摩擦力实现运动的传递。钢丝绳经过适当预紧后,传动精度可大于10×10-6rad[2],被广泛应用于各种高精度指向机构。精密柔索传动已成为提升新一代高精度、轻量化精密伺服机构性能的重要途径[3]。
美国Sagebrushtech 公司最早(2001 年)致力于精密柔索传动的研究和开发,并申请了“The Rotolock Rotarty Drive”专利[2]。随后,AvL Tech公司、Sat.Lite公司、GD公司等相继推出了基于精密柔索传动的车载天线。该天线表现出了优良的指向精度和极强的抗风性能,广泛应用于军事通信、电视广播等领域。
本文将基于精密柔索传动机理,给出柔索传动天线座的设计过程,并制作原理样机,对天线座的传动回差进行检测。
1 理论计算
1.1 载荷计算
针对2.4 m口径天线,设计柔索传动天线座。天线座承受的载荷有风载荷、重力不平衡载荷、摩擦载荷和惯性载荷。其中惯性载荷是由于物体具有加速度才产生的,对于静中通天线来说,方位和俯仰的转速较低,加速度很小,故惯性载荷可忽略不计。
天线座风载荷技术指标为:稳态风速V稳为20 m/s、峰值风速V峰为27 m/s时,天线正常工作,则天线座的设计风速V设为[4]:
基于风载荷计算公式和Matlab程序[5],天线座方位轴承受的最大风载荷M风,方和俯仰轴承受的最大风载荷M风,俯分别为921.88 N·m和2 188.95 N·m。
天线反射器质量m反为100 kg,天线反射器重心到俯仰轴的距离L反为1.2 m,则天线座俯仰轴的最大重力不平衡载荷M重为:
摩擦载荷M摩的计算公式为:
式中:f为摩擦系数;N为正压力;D1为轴径。经计算方位轴承受的摩擦载荷M摩,方和俯仰轴承受的摩擦载荷M摩,俯分别为62.26 N·m和1.32 N·m。
天线座承受的载荷为风载荷、重力不平衡载荷和摩擦载荷的综合。按均方根综合,方位轴受到的负载力矩MA和俯仰轴受到的负载力矩ME分别为:
1.2 钢丝绳选型
在预紧力F预的作用下,无外部负载时,出绳端的张力F出、入绳端的张力F入与F预大小相等。当主动轮施加负载转矩M负时,则有:
式中,F负为负载张力。F负的计算式为:
式中,r为主动轮的半径。
完全滑动时,定义入绳端与出绳端的张力之比τ为:
联立式(6)、(7)、(8)和(9)得负载力矩表达式:
根据柔韧体摩擦的欧拉公式可知:
式中:μ1为钢丝绳与传动轮之间的摩擦系数;θ为钢丝绳与主动轮之间的包角。
将式(11)带入式(10)得钢丝绳预紧力与负载的关系为:
方位传动采用4根钢丝绳(n方= 4),每根钢丝绳在方位主动轮上缠绕2圈,包角θ方约为4π rad,钢丝绳与方位轮之间的摩擦系数为0.15,方位输出轮的半径r方=0.27 m,方位负载MA=M负=923.98 N·m,带入式(12)得方位单根钢丝绳的预紧力F预,方为:
由式(8)得方位单根钢丝绳承受的载荷F负,方为:
则方位单根钢丝绳总的载荷F总,方为:
式中,16为所取钢丝绳的安全系数。
同理,俯仰传动采用12根钢丝绳(n俯= 12),每根钢丝绳在俯仰主动轮上缠绕3 圈,包角θ俯约为6π rad,钢丝绳与俯仰轮之间的摩擦系数也为0.15,俯仰输出轮的半径r俯= 0.21 m,俯仰负载ME=M负= 2 484.85 N·m,带入式(12)得俯仰单根钢丝绳的预紧力F预,俯为:
由负载引起的俯仰单根钢丝绳承受的载荷F负,俯为:
则俯仰单根钢丝绳总的载荷F总,俯为:
根据式(15)和(18)的计算结果,选用直径为4 mm、规格为6×7的不锈钢钢丝绳,其破断拉力为9 020 N,安全系数不小于16。
1.3 碟形弹簧的选型
在柔索传动中,预紧力是保证传动进行的重要手段,因为钢丝绳只有经过适当的预紧后,才能避免打滑,消除传动空回,提高传动刚度。预紧装置的设计一方面要便于调节钢丝绳的预紧力,另一方面还需具有对钢丝绳轻微松弛实施补偿的能力[6]。碟形弹簧以其结构紧凑、刚度大、垂直伸缩量微小等特点,经常应用于高压紧固、高强度缓冲等场合。该柔索天线座采用A系列碟形对合组合弹簧组从端部对方位和俯仰的钢丝绳进行预紧,其参数见表1。

表1 碟形弹簧参数mm
压平碟形弹簧时的载荷Pc为:
式中:E为弹性模量,E= 2.06×105MPa;μ2为泊松比,μ2= 0.3;K1和K4为弹簧系数,根据弹簧外径与内径的比值,查阅《机械设计手册》(第6版)得K1=0.698,弹簧无支撑面时,K4=1。
由式(13)和(16)可知:钢丝绳需要的预紧力与负载密切相关。预紧力过小,绳轮之间的静摩擦力不够,会发生绳轮打滑现象;预紧力过大则会降低钢丝绳的使用寿命。为在一定程度上量化钢丝绳的预紧力,在预紧过程中调整碟形弹簧,使之呈现压平状态。根据式(19),碟形弹簧压平时可为钢丝绳提供854.3 N的预紧力,大于方位和俯仰钢丝绳需要的预紧力,满足使用要求。
2 结构方案设计
柔索传动天线座结构形式采用应用最广的俯仰-方位型,方位位于俯仰上方,如图1所示。该种型式结构紧凑,受力情况比较合理,调整测量方便[7]。天线座方位从动轮既可以作为方位部分的输出轮,又可以作为整个天线座的支撑。方位转盘通过转盘轴承与方位从动轮连接,方位电机、减速器固定于方位转盘上,方位电机通过减速器带动方位主动轮运动,再通过柔索将运动传递到从动轮上,进而实现方位的转动。俯仰有两个从动轮,分别位于方位转盘的两侧。为了降低整个座架的高度,俯仰两个从动轮穿过方位转盘,下移了一定的高度。俯仰的两个主动轮通过夹壳联轴器与同一台涡轮蜗杆减速器的左右两个输出端连接,减速器由俯仰电机拖动,实现俯仰的转动。

图1 精密柔索传动天线座
俯仰组合由主动轮、从动轮、支架、钢丝绳、预紧装置、支臂和码盘等组成,如图2所示。俯仰主动轮和从动轮通过轴承安装于两个支架上,两个支臂通过螺钉分别固定在从动轮的两侧。俯仰从动轮上部为平台结构,预紧装置安装在此平台上。钢丝绳以“8”字型缠绕在主动轮和从动轮上,其中主动轮上缠绕3圈,包角接近6π rad,从动轮上缠绕接近1圈,整个俯仰组合通过螺钉安装在方位转盘上。

图2 俯仰组合
方位组合由主动轮、从动轮、方位转盘、转盘轴承、预紧装置、电机、减速器、同步机构和码盘等组成,如图3所示。为了避免方位主动轮呈现悬臂结构,在方位主动轮外侧设计了一个支撑装置。该装置刚度较大,通过螺钉安装在方位转盘上,主动轮下端通过轴承安装在该支撑装置下端,主动轮的上端通过键与减速器连接。为了避免方位转动时主动轮与预紧装置发生干涉,将预紧装置设计在从动轮的内部。与俯仰一样,方位的钢丝绳也以“8”字型缠绕在主动轮和从动轮上,其中主动轮上缠绕2圈,包角接近4π rad。为了实现方位-200°~+200°的转动,方位钢丝绳在从动轮上的缠绕角度为540°,同时大的缠绕角度可以避免钢丝绳在端部工作。这是因为当钢丝绳在端部工作时,由于受到预紧力和绳轮接触状态突变的影响,传动特性变化较大,应尽量避免该情况的发生。
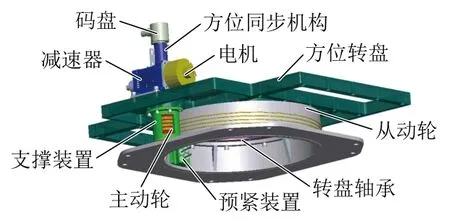
图3 方位组合
方位同步机构用于测量转轴的角位移。由于该天线座架方位的转动范围为-200°~+200°,因此采用图4所示的机构实现方位的同步运动。该同步机构由支架、带螺纹的轴、滑块、接近开关和码盘组成,可将旋转运动转换为直线运动。其工作原理为:轴随方位组合转动时可带动滑块上下移动,滑块与接近开关相距一定距离时,方位组合停止转动。整个方位同步机构安装在方位减速器的输出端,理论上滑块在轴上的行程足够长,就可以实现方位任意大转角的限位。

图4 方位同步机构三维模型
柔索座架方位传动和俯仰传动均采用碟形弹簧对钢丝绳末端进行预紧,碟形弹簧的选取见1.3节“碟形弹簧的选型”。碟形弹簧预紧装置结构简图包括预紧螺栓、预紧螺母、碟形弹簧和垫圈,如图5所示。其工作原理为:钢丝绳从预紧基座的一端出发,绕过主动轮和从动轮,固定到预紧螺栓的槽内,碟形弹簧组通过预紧螺母的压缩实现对钢丝绳的预紧。预紧螺栓可在预紧基座的槽内滑动一定的距离,用来调整钢丝绳长度方向的误差。设计时只要保证钢丝绳长度方向的误差和碟形弹簧组的压缩变形量之和小于预紧螺栓在预紧基座槽内的滑动距离,该机构就可实现对钢丝绳的预紧。

图5 碟形弹簧预紧装置的结构简图与实物图
3 回差检测
回差检测的方法为:定义方位轴(或俯仰轴)的转轴中心为O点,在座架上选取远离轴线的位置定义为A点,测出OA的距离。另取一点定义为B点,使AB垂直于OA,将百分表沿着AB方向放置。对方位轴(或俯仰轴)施加一定的载荷,记录百分表的读数,再反方向施加相同的载荷,再次记录百分表读数,两次读数的差为AB的距离。在理论上,AB为一小段圆弧,但因该圆弧很小,固用直线代替。知道AB的长度w方(或w俯)和OA的长度h方(或h俯)后,对其比值取反正切值即为方位(或俯仰)传动链的回差。
对方位轴施加1 000 N·m的载荷,根据上述原理,测得方位轴的回差θ方为:
同理,对俯仰轴施加2 500 N·m的载荷,俯仰轴的回差θ俯为:
方位轴和俯仰轴的回差一部分来自钢丝绳的变形,还有一部分来自减速器的齿隙。检测结果显示,柔索传动天线座可有效减小传动空回,提高天线的指向精度。
4 结束语
精密柔索传动作为一种新颖的传动方式,通过绳轮之间的静摩擦力实现力和运动的传递,从原理上就可以避免空回的产生,可有效提高天线的指向精度。然而,柔索传动的结构形式决定了其无法实现回转运动,所以只可用于无需连续回转的天线座传动链,如静中通的方位和俯仰传动链、动中通的俯仰和交叉传动链等。由于柔索传动具有高刚度、低空回、结构简单、布局灵活、制造装配要求低、无需润滑、传动平稳等优点,因此在天线领域具有很大的应用潜力。
