煤巷综掘机电控系统自动化设计与应用
2023-11-14郝跃飞
郝跃飞
(山西汾西矿业(集团)有限责任公司贺西煤矿,山西 吕梁 033300)
0 引言
随着现阶段我国煤矿现代化水平和机械化率的不断提高,更多的大型机械装备投入矿井用于采煤、掘进、运输[1-4]。由于先进装备的引进应用,矿井运煤和出矸作业形成高效率的流水线形式,不仅极大地降低人工成本,更为职工改善作业环境和生产条件提供了安全保障[5-9]。但是设备技术的不断改进,由自动化向智能化的转变升级,仍然面临诸多困难[10-12]。基于此,为更加适用于矿井作业条件和环境,将汾西矿业集团贺西煤矿使用的EBZ260型综掘机原有设备电控系统进行优化改进,重新设计,极大提高了生产作业线的掘进效率。
1 EBZ260型综掘机参数
1.1 综掘机硬件配套设施
EBZ260型综掘机的硬件配套装备主要包括行走部分、支撑部分、掘进部分、控制系统、水路液压系统等部分,其截割摇臂以及滚筒的最大抗压强度可达到80 MPa,根据摇臂的扭矩,其适用于巷道断面面积为8~22 m2,最大施工行走坡度为±16°,铭牌显示基本参数见表1。
为了便于设备的拆装入井和运输,采用模块化的安装设计,具体可将综掘机拆解为电机、行走履带、截割摇臂、截割头、减速机、固定回转台、液压缸支撑架和连接管路等部分。综掘机的主要控制系统由电控箱、集成操作台、开关按钮箱、传感器和驱动电机等组成,而集成电路板、控制元件等与电控箱为一个整体,采用隔爆式设计,并与配有显示装置和报警装置的操作面板共同完成对设备的控制。
1.2 综掘机控制系统
虽然EBZ260掘进机在实际生产中通过电控系统可以实现一定程度的自动化,但相比于现阶段的智能化综合机械而言,还有一定的差距,其控制精度也存在问题。
现有的控制系统可以监控运行中的油温、油位等异常故障信息,但是在整个集成网络中上传速度、远程监控和面板报警显示等功能仍不健全;现有设备出厂设计中未留有足够数量的通信网络接口,造成信号传输速度慢,且在后期改进扩容网络和系统升级时,无法将其有效改造并入更先进的集成系统中;现有电控系统对于常见的过流保护、过载保护、失压保护等不能有效实现保护,当出现设备故障时,不能及时反馈进行保护动作;电控系统不能及时将设备的具体故障点和故障原因进行有效排查并上传,远程监控系统也不能显示井下作业现场的实时信息,在检修排查过程中,不仅需要耗费人力物力,更耽误了有限的生产时间,导致检修效率较低。因此,如何建立更加完善和更加高效的综掘机自动化控制系统,对于提高矿井安全生产管理水平具有重要的实践意义。
2 电控系统整体设计
2.1 系统控制要求
根据MT/T238.3标准要求,以及综掘机实际工作环境,设计电控系统的具体控制要求:数据线可对实时数据与故障信号完成快速传输;对综掘机运行期间的主要状态参数进行实时检测,其中包括油箱油位、油温状态、系统电压、总线模块、控制面板状态、绝缘监测、瓦斯检测等;故障报警后,对于故障原因判断和报警提示等响应,并且在故障处理完成后,报警提示自动解除;对行走电机和截割电机的状态检测,如过电流、过电压等状态。
2.2 系统框架结构设计
在EBZ260型综掘机现有电控系统可检测的故障基础上,对控制系统进行改革升级[3]。主要利用高性能的控制器来实现对数据处理、传感器检测、故障判断与预警等功能,并经过各种信号指令的收发,显示在控制大屏上。其中,输入信号就包括电流信号、电压信号、温度报警信号、油位信号、传感器信号等;而输出信号则包括故障报警、电机启停、运转状态、设备启停等。当控制处理器接收到相对应的信号后,经过数据信号的分析、计算、判断,回传到计算机终端,从而根据终端指令判断,做出设备启停、保护作用、故障报警等动作。
根据电控系统的控制要求,以及现有的控制结构,将整体电控箱电源设计为24 V的本安型防爆电源,并辅助配备BH-9型4AD保护功能模块,根据功能需要不同,如数据处理、信号转换、信号执行、指令采集等,将电控模块进行简化。系统框架结构设计如图1所示。

图1 系统框架结构设计
3 控制系统子系统设计
3.1 控制器型号参数选择
由于综掘机生产作业的环境具有煤尘大、高温、潮湿等特点,这种环境对各种传感器有一定的锈蚀作用。因此,为满足环境适应要求,对控制器的型号选择也要求较高。经过分析比对,确定技术成熟的DCF-1型控制器。定型后,该型控制器采用全封闭太空铝材料封装,并且对于防尘、防潮、防震动、防静电和防电磁干扰等具有优良抵抗特性;同样基于32位高性能的微处理器,主要由CPU和I/O这2个终端部分构成,其多个数据采集、通信接口也能够满足后期扩展升级的需要,不需经过外部端口接入的增加而构建电控系统,而较大容量的掉电存储也能够确保在故障停电期间实现对数据的任意读取与存储。DCF-1型控制器样品如图2所示。

图2 DCF-1型控制器样品
3.2 信号采集设计
综掘机在截割作业时,需要采集多种类型的信号以检测设备运行状态是否正常完好,如对电机的启停、油温、油位、电压、电流等信号采集。针对特定信号,需要采取专门方式进行采集,利用CAN总线将采集信号与输出模块和控制器进行连接,按照图3所示的信息采集功能架构实现控制箱对于信号传输的功能扩展。当综掘机的油箱工作温度达到预设警戒值时,可以通过AT-1A热阻感温传感器实现检测,其精确误差可达到±0.1 ℃,并将信号传输至BH9保护模块中;采用CSP2-1500V型传感器检测工作电压,将接入电压快速变压调频至设备运行所需的5 V、12 V等值电压,从而实现效果检测;选用IR420-D6型号的检测仪,在供电回路中可接入两组继电器节点、接触器闭合节点,对电机运行过程中的回路是否开断进行检测,从而实现电机绝缘信号的采集传输。

图3 信号采集功能架构
3.3 CAN总线设计
CAN总线系统具有明显的设计优势,其采用非破坏式的总线仲裁机制,可有效避免多节点的数据冲突,传输速率更是高达1 Mbit/s,具有更强的纠错机制和检错能力。改进系统后采用CANOpen协议,提高总线控制的可靠性,多节点的终端接口,利于后期不同设备型号配置的更好接入与兼容。在现有综掘机控制系统的基础上,将CANOpen总线系统设计划分为电控箱和操作箱2部分,并通过双绞屏线进行连接,如图4所示。其中,电控箱内置有24 V总电源、控制器、分布式I/O等,操作箱内置有远程DI、显示屏,两者皆有的光耦隔离则内置有保护通信接口的中继模块。

图4 CAN总线设计结构
3.4 电控箱设计
电控箱一般安装在综掘机操作台的侧后方,其中封装有控制电路板、元器件、动作元件等,本着安全隔爆的使用设计原则,将其设计为上下2个独立腔体,通过控制线和电缆接线2个端子接线方式进行连接。电控箱正视图如图5所示。
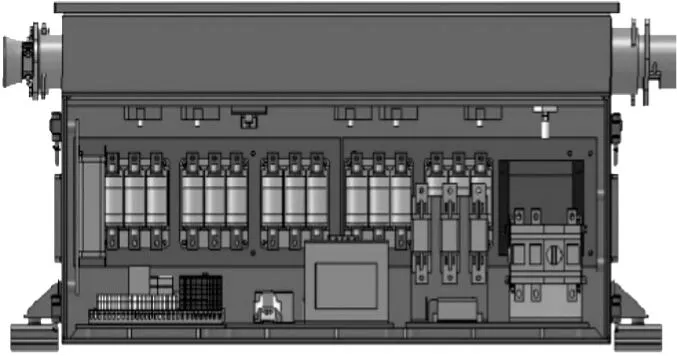
图5 电控箱正视图
电控箱的下方为主腔,设置有电路熔断器、保护装置、绝缘检测模块、变压器、继电器、DC电源、交流互感器等器件,且在腔室后壁安装有耦合仪表和真空接触器。在主腔室的外壳设置有接地螺栓和隔离开关,为提高其操作安全性,防止误动作,还增设有机械锁。主电路板门板装有拨动式电源启停开关,采用FX2N-64MR可编程式控制器,以及BH9集成信号转换器等,以此更加优化腔体内的元器件布局,提高电控箱的使用操作稳定性和安全性。
3.5 电气系统软件设计
3.5.1 主程序控制设计
电气系统的主程序编程软件主要采用符合IEC国标的PROSYD 1131软件,可支持主流普适的编程语言,其具有丰富功能的指令程序和快速计算能力,如比较函数、循环函数、赋值函数、定时器函数、移位函数、计算器函数、浮点数运算函数、PID函数等的计算功能,除既定设置的函数计算程序,用户也可以根据实际需要进行自行设定函数编程,极大缩短开发调试公式的时间[5]。此外,为便于在线诊断及实时监控,程序开发人员允许用户在硬件连接运行时保持数据的在线修改功能,同时以图形、文本形式记录并存储修改数据的变化内容。如图6所示,当指令程序实现开始后,会出现延迟5S的保护开机,进而依次显示初始化程序、系统的管理状态、电机管理程序,直到启动设备运行状态的判断处理这一程序栏。
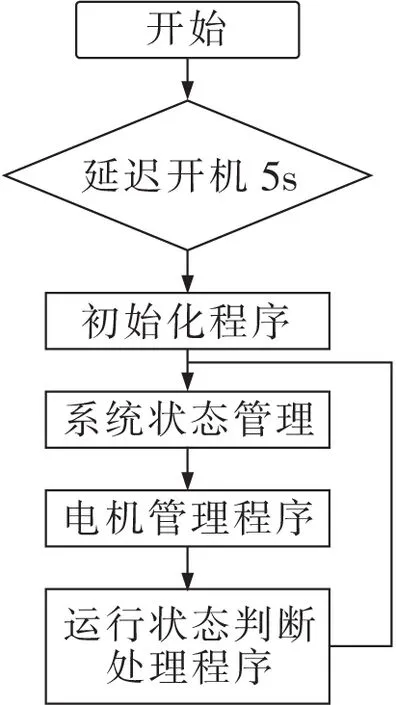
图6 主程序控制系统启动设计
3.5.2 子程序控制设计
系统子程序的软件设计主要通过发送和接收PDO映射管理,以读取各项设备的运行参数,当程序启动后,依次对警报控制器、通信模块、系统电压、瓦斯监测等信号的输入与输出进行检测读取,并将运行状态的检测结果显示在监测屏幕上。子程序控制系统启动设计如图7所示。
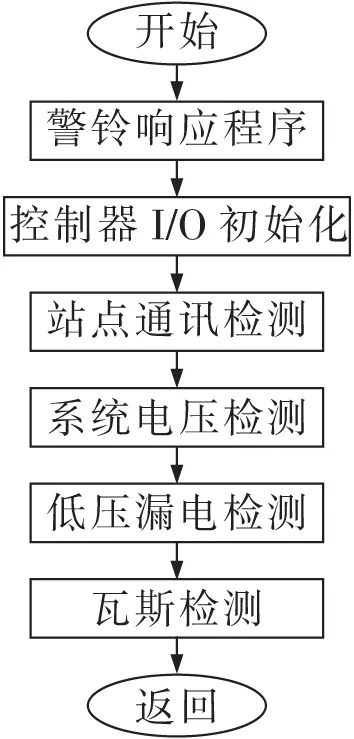
图7 子程序控制系统启动设计
4 改造效果应用分析
为验证系统改造后的应用效果,对安装新型电控系统的综掘机进行生产实践论证,经过运行参数的采集对比,以及实际测试如图8所示。
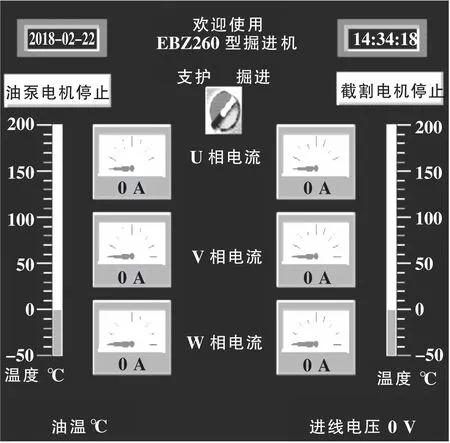
图8 EBZ260综掘机运行参数显示面板
对综掘机运行中的三相电流、进载电压、油温、油位等参数进行检测,未发现明显波动异常,整体稳定性、可靠性较高,能够满足掘进需要。
当出现异常故障时,系统可以自动调整至故障界面,并在显示屏上以特定信号或文字形式显示故障点以及合理的处理方式。尤其针对油泵电机、截割电机、转载机二运电机、皮带减速电机等设备出现异常故障跳电时,也会快速做出反应,及时反馈电机的故障原因,便于提高检修效率。
升级系统后还支持故障界面的历史数据查询,最多可记录故障信息40条左右,便于读取分析故障类型和发生概率,从而提高设备检修维护的重点,已处理完成的故障辨识为绿色,待处理和未完成故障显示红色。
升级系统后还可将综掘机的运行参数与终端相连接,导出相关参数进行系统性分析研究,找出故障规律,提高检修效率,从而不断完善系统,实现设备的改造升级。
5 结语
在现有EBZ260型综掘机电控系统的基础上进行改造升级,重新整理设计架构,以DCF-1型控制器为蓝本,采用CANOpen总线系统设计使得硬件设施运行更加流畅可靠,在软件设计方面,采用PROSYD 1131软件实现了良好的人机互动效果,界面设计更加简洁,自动化控制程度更高,在对设备运行状态的各项参数检测环节中,能够更快速识别故障点,提供最优解决方案,提高设备运行的稳定性和可靠性。
