倾斜摄影测量在不动产测量中的应用与评价
2023-11-14高平
高 平
(山东港通智汇信息技术有限公司,山东 烟台 264000)
不动产是指按照法律规律,根据用户所属权利划分的具有固定性特点的资产,包括实体空间与该空间内的附属物品,具有不动产单元是相关调查工作的唯一标志。通常情况下,不动产单元由权属,确定、分配空间组成,不同的空间根据其附着物(林木、房屋、土地等)的价值不同也有不同的独立价值。
不动产的权属调查是统一不动产登记的基础,在政府的规划与领导下,将技术工作与权利人结合起来,以产权调查、不动产测量为基础,确定产权、边界和其他信息,同时为产权证书提供可供参考的技术信息。不动产权属调查的内容主要有不动产单位的设置和编号、产权关系、物业单元面积与空间关系、所有权与位置关系、物业单元产权与位置调查等。
目前我国的城市化进程发展速度较快,城镇向周围区域迅速扩张。城市内部正在大规模拆迁和建设,各项基础设施也都在飞速地建设,土地及其所有权也在不断发生变化。随着深入新农村建设,规划乡村用地也需要房地产测绘资料为其提供信息支撑。因此实现快速登记房屋信息和联网,对稳定房屋价格具有重要意义。
1 倾斜摄影测量准备
1.1 项目概况
该研究测区位于山东省,测区面积1km2,根据有关单位的初步调查,航摄区域地势平坦,测区内包括低层、高层楼房,部分区域内包括厂房、平房,房屋形态符合乡镇特点,有较强的地域特性。
1.2 投入设备与技术线路
为满足航摄作业需求,选用的无人机应具有较长续航和高负载的飞行性能,并对无人机进行整体按照模块化设计对其进行部署,通过该方式可以提高航摄数据的可靠性,使其操作更便捷。
在此基础上,配置A3Pro 飞行控制系统、智能飞行电池(组)管理系统、Lightbridge2 高清影像数字化传输系统,最高可负载6kg进行飞行作业且支持不同型号的硬件与不同功能的软件拓展,可持续飞行时长超过30min。
根据测量作业需求,为达到1 ∶ 500 成像,无人机在航摄过程中的分辨率不低于0.05cm,因此测量前需要调试无人机倾斜摄影相机技术参数。见表1。

表1 无人机倾斜摄影相机技术参数调试
在表1 基础上,设定地面参照物的分辨率为1.5cm,设计无人机测量技术线路,如图1 所示。

图1 无人机测量技术线路
2 倾斜摄影测量在不动产测量中的应用
2.1 倾斜摄影测量无人机航线与布设像控点
将飞行高度设置为距离起飞地面110m,航向间隔距离为15m,航向重叠率为75%,旁向间隔距离设置为35m,旁向重叠率设置为70%,地面分辨率0.015m[1]。航向航线延伸超出航摄区域边界线110m,旁向航线延伸超出航摄区域的边界线100m。确定满足无人机旋偏角在像片航向与旁向重叠度符合规定后,将其最大值设置为25°。
完成上述航线布设操作后,结合SDCORS 技术,按照区域网法,布设像控点。要求平高控制点间的距离在150m~280m[2]。采用飞行前控的方式,选择易于分辨的地面固定标志的像控点,如果点位周边没有明显标志,可以在地面喷涂相控靶标[3]。若像主点或标准点的周围被水域、云影等覆盖,可将将该像主点放落入水中。若像主点的落水范围、落水面积和位置不会影响到后续模型的连接,则按照正常的布设方式完成对航线布点。如果当主点连续落入水中,并且航向上有存在三片重叠范围内无法确定连接点时,须最大程度地控制测图面积,加密布设落入水中区域内的像控点。
当选择刺像控点时,应该在高程没有太大变化的区域中选择一个与其有良好关系的线状地物交点,或者是图像小于0.2mm 的点状地物的中心位置。要以相邻像片上图像清晰,便于进行联测为准。为满足倾斜摄影测量技术要求,选用电子图像控刺点方案[4]。使用Photoshop 软件,可以将有原始分辨率的图像放大至可看到特定点位的比例,并在这些点上进行交叉标记,当内业加密时,就可以清楚地判断外业选择点的具体位置,可以提高对空三加密的准确性[5]。
2.2 像控点测量
在完成布设无人机航线和像控点后,测量各个像控点,获取不动产测量数据[6]。引入INS 系统,在无人机上安装一个稳定的平台,用于模拟局部水平面,再建立一个指向分别为天顶、正北和正东方向的坐标系[7]。当INS 系统运行时,3 个轴向上对应的速度分量如公式(1)~公式(3)所示。
式中:ve(tk)、vn(tk)、vu(tk)分别为正东方向速度分量、正北方向速度分量和天顶方向速度分量;ae、an、au分别为三个方向的加速度;ve(t0)、vn(t0)、vu(t0)分别为三个方向的初始速度[8]。通过公式(1)~公式(3),对速度进行积分运算,确定被导航载体的空间位置,再用经纬度和高程的形式表示,如公式(4)~公式(6)所示。
式中:λ0、φ0、h0分别为被导航载体最初设置的原始位置;λ、φ、h分别为经度、纬度和高程相对时间的变化率。根据运动速度进行计算,如公式(7)~公式(9)所示。
将经度、维度和高程的计算公式代入上述三个等式中,计算被导航载体在瞬时条件下的位置坐标,如公式(10)~公式(12)所示。
式中:M为地球椭球子午圈;N为卯酉圈曲率半径。根据上述运算可知,在计算前必须确定载体初始位置的λ0、φ0、h0数据,将其输入INS 系统中。通过连续测量得出对应的航向角和速度,并计算下一个点的位置,完成对各个像控点的测量。
2.3 制作不动产测量模型
为清晰地展示测量结果,构建不动产模型采用三维建模的思路,利用ContextCaptureCenterMaster 软件构建实景三维模型。因为要确保倾斜摄影3D 模型成图的准确度,所以对图像质量要求很高,因此在航空拍摄过程中,需要实时检测航空拍摄图像的质量。漏点修补必须按照原有的设计路线,使用相等距离的数码航拍设备且航线的长度要符合地区网点的要求。将拍摄区图像加载软件中,设定一定数目的控制点后,进行波束法区域网的整体平差,平差过程以一幅图像构成的一束射线为平差单位,用线方程,对各个射线在空间上的转动和移动进行试验,得到各个模型间的共同射线,使其达到最优的交汇,并将整个区域添加控制点的坐标系中。空三加密如图2所示。
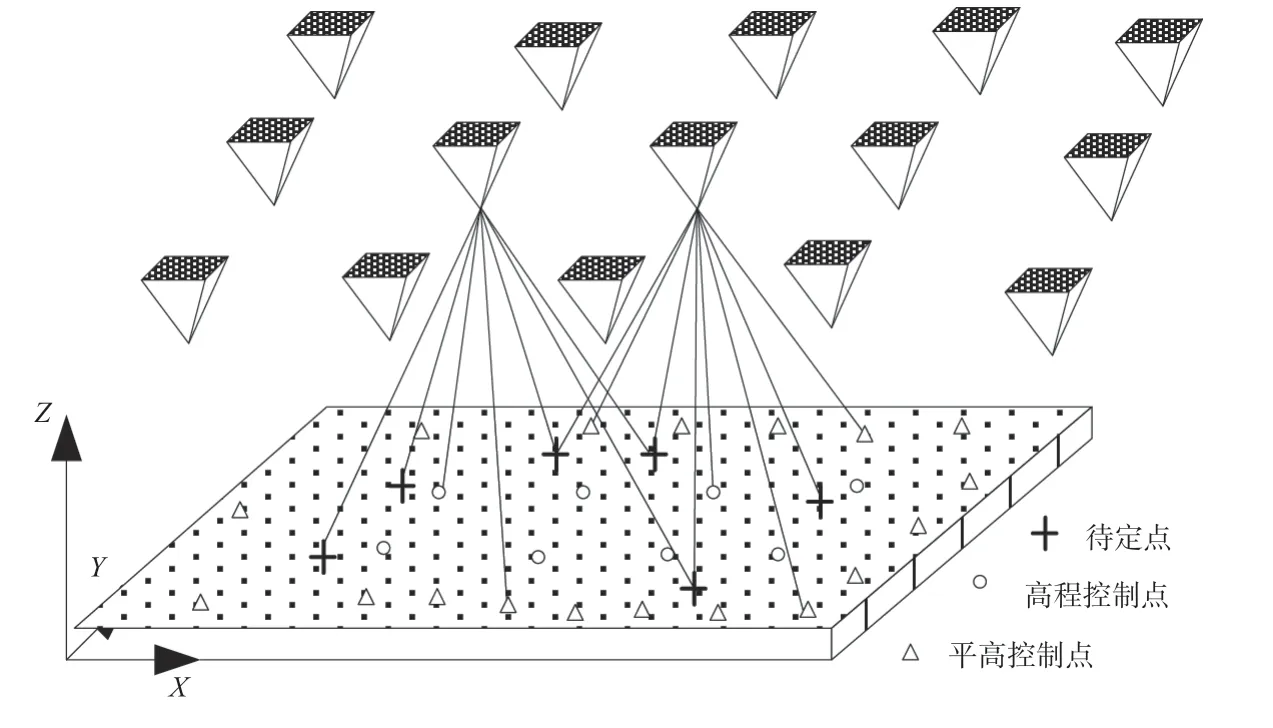
图2 空三加密示意图
与高精度图像匹配算法相结合,实现图像中同类点的自动匹配,并提取更多特征点来构建稠密的点云,精确表达不动产测量的结果。
3 精度评价
完成上述设计后,为确保工作的规范性,使用手持测距装置进行辅助、利用GPS、全站仪等设备,对现场倾斜摄像得到的不动产统计数据进行精度评价。通过实测得到的精确点位共有350 处,筛选采集到的统计点后,去除一部分因边界模糊等原因造成的不可用点位,剩余的点位作为该次试验中的样本数据,后续用于对该方法的精度评价。在过程中,需要先计算测量结果中界址点的坐标边长与实测边长的偏差,如公式(13)所示。
式中:ΔD为测量结果中界址点的坐标边长与实测边长的偏差;mj为界址点的中误差;D为临界点实测距离。参照计算结果,计算测量结果中平面位置中误差与高程中误差,如公式(14)和公式(15)所示。
式中:ΔS为平面位置中误差;n1为测点平面位置坐标;ΔZ为高程中误差;n2为测点高程位置坐标。按照计算结果,评价测量精度,见表2。

表2 测量检查点精度统计结果(单位:m)
4 结论
随着不断推进国家现代化建设,人们对房地产市场的需求逐步增加,意味着对房地产市场的调查工作也需要更高的要求。由于房地产测量工作现状的特殊性,因此需要及时更新房地产测量的结果,土地信息登记涉及人们的财产,所以数据的更新要能够精确地反映实际的变化。现今地籍和界址点变动较快,各地籍区段跨度大且差异显著,对实地调查工作的精确度提出更高要求。为满足房地产调研需求,该文进行了研究,通过对测量结果的评价,分析表2 的结果,统计高程中误差与平面位置中误差最大值和最小值,其中ΔS最大值为0.061,ΔS的最小值为0.003,ΔZ的最大值为0.155,ΔZ的最小值为0.004。根据不动产测量标准可知,使用该文设计的测量方法进行现场作业,得出的不动产测量结果满足工作需求,也为有关单位的不动产调查作业提供了高精度数据。
