基于改进极限学习机的通风扇故障诊断
2023-11-14徐文静
徐文静
(佛山市顺德区宏翼工业设计有限公司,广东 佛山 528000)
作为飞机电子设备的主要通风设备,电子舱通风系统的正常运行是保证电子舱正常工作的必要条件[1]。电子舱通风扇发生故障时,会造成电子舱无法正常工作,从而影响飞机运行。在通风扇出现轴承磨损或叶片断裂等情况下,高速旋转的风扇会产生巨大异响。通风扇出现卡阻,容易引起发热,使驾驶舱出现异味,严重时甚至出现火花或者烟雾,导致飞机出现紧急备降、航班延误等非正常停飞事件[2]。因此对通风扇故障诊断进行研究,提高通风扇故障诊断的准确性对提高飞机安全性具有重要意义[3]。
该文采用改进极限学习机对通风扇进行故障诊断,建立基于改进极限学习机的通风扇故障诊断模型,采用实际通风扇故障样本数据验证模型的正确性和实用性。
1 改进粒子群算法
1.1 粒子群算法
1995 年,Kennedy 等人提出了粒子群优化算法[4](Particle Swarm Optimization,PSO),该算法的基本思想是自然界中飞鸟寻找食物的行为,认为优化问题求解与飞鸟捕食类似[5],单个飞鸟个体等同于优化问题求解所用的“粒子”。鸟群在捕食过程中遵循下列原则:1)不与其他飞鸟个体发生碰撞。2)个体速度与周围其他飞鸟相差不大。3)单个飞鸟逐渐向鸟群中心靠拢。PSO 算法的寻优示意图如图1 所示。
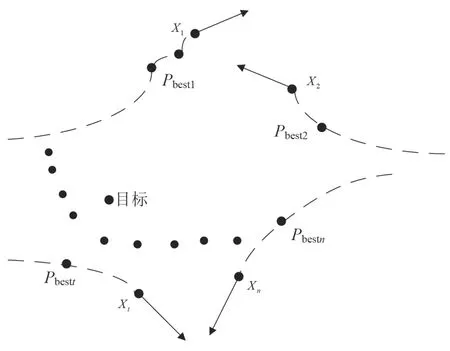
图1 PSO 算法的寻优示意图
PSO 算法的原理如下:令d维空间中存在一个粒子个体容量为N的种群,将种群中所有个体的位置和速度进行初始化,即给每个个体赋予速度和位置,则粒子个体的速度向量为Vi=(vi1,vi2,…,vid)T,位置向量为Xi=(xi1,xi2,…,xid)T。种群中所有粒子均根据目标函数更新速度和位置,将d维空间中个体最优位置记为Pbestid=(pi1,vi2,…,vid)T,种群最优位置为Gbestd,粒子群速度和位置更新公式如公式(1)、公式(2)所示。
式中:N为种群规模,取值通常为20~50;i为粒子个体,i=1,2,…,N;k为当前迭代次数;为第k次迭代时第i个粒子个体的速度;为第k次迭代时第i个粒子个体的位置;ω为惯性权重;c1、c2均为学习因子,取值均大于0;r1、r2均为随机数,取值为[0,1]。
粒子个体速度在迭代过程中可能出现“越界”的情况,为了防止该情况出现,通常会设置一个最大速度vmax,如果粒子个体速度>vmax,则有=vmax;如果粒子个体速度<-vmax,则有<-vmax。PSO 算法影响算法的收敛精度。
1.2 约束条件
针对PSO 算法的不足,该文在粒子群速度更新公式(公式(1)、公式(2))中引入收缩系数,并使收缩系数随迭代次数的变化而变化,用以控制粒子速度,使粒子群在迭代前期能够遍历搜索空间,确定最优解所在区域。而在迭代后期,粒子群局部搜索能力变强,可在最优解所在区域内进行局部搜索,快速确定最优解所在位置[6]。改进PSO 算法的粒子群速度更新公式如公式(3)~公式(5)所示。
式中:η为收缩因子;φ为总学习因子,φ∈(4,+∞);kmax为最大迭代次数;K为调整系数,K∈(0,1),调整系数的作用是控制粒子速度和搜索区域,其值变小时,粒子飞行速度下降,搜索范围随之缩小,算法收敛速度加快。
PSO 算法能够有效避免寻优结果陷入局部最优解,提高算法的收敛精度[7]。
2 极限学习机
2.1 单隐含层前馈神经网络
单隐含层前馈神经网络(Single-hidden Layer Feed-forward Neural Network,SLFN)是一种结构简单的神经网络预测方法,具有良好的函数逼近能力和自学习能力[8],其网络结构如图2 所示。
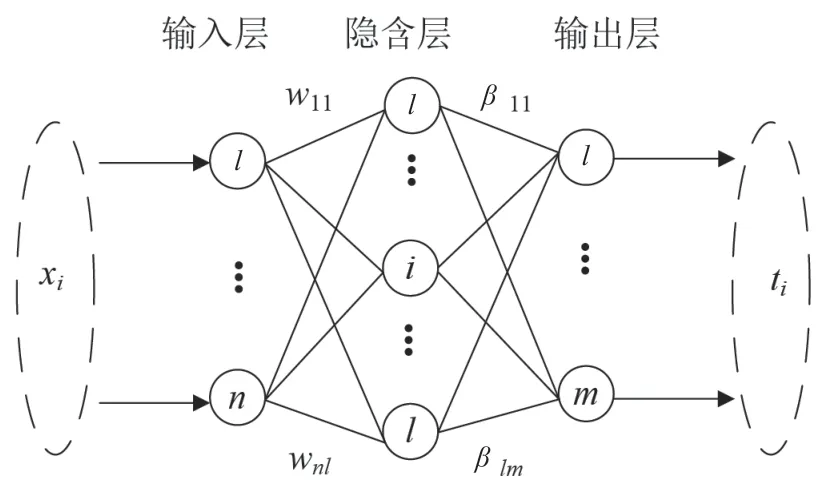
图2 单隐含层前馈神经网络结构
由图2 可知,SLFN 的网络结构由输入层、隐含层和输出层构成,其隐含层只有1 层,令输入层节点数为n,隐含层节点数为l,输出层节点数为m,对任意样本(xi,ti),有xi=[xi1,xi2,…,xin]T∈Rn,ti=[ti1,ti2,…,tim]T∈Rm,则SLFN 输出如公式(6)所示。
式中:wj=[w1j,w2j,…,wnj]T,表示输入层节点j和隐含层节点之间的权值;bj为隐含层中节点j的偏置量;βj=[βj1,βj2,…,βjm]T,表示隐含层节点j与输出层节点之间的权值;g(x)表示激励函数,激励函数通常为“sigmoid”“sin”和“cos”等函数。
当前馈神经网络进行迭代计算时,每迭代一次,所有网络参数都需要调整,从而导致输入层、隐含层和输出层之间的权值和偏置量相互影响。由于SLFN 采用的是梯度下降法,因此SLFN 方法在实际应用中存在以下不足:1)模型的训练速度慢,训练时间长。2)训练过程中容易陷入局部最优值,难以找到全局最优解。3)神经网络的学习性能受学习率η影响较大。
2.2 极限学习机基本原理
为了解决SLFN 方法的上述3 点不足,Huang 等人认为可以将SLFN 的权值和偏置量的设置看作线性系统,通过输出矩阵求逆得到输出权值,并根据这一思想,提出了极限学习机[8](Extreme Learning Machine,ELM)。ELM 学习速度快、泛化性能好,目前在医疗、能源和金融等领域具有应用广泛。
ELM 的基本原理如下:令样本数据为{xi,ti|xi∈Rn,ti∈Rn,i=1,2,…,N},激励函数为g(x),将SLFN 写成矩阵形式,如公式(7)所示。
式中:H为隐含层矩阵。
在隐含层矩阵中,激励函数能够被无限次微分,因此ELM 的权值和偏置量可以根据需要进行设置,不用反复调整。因此可将公式(7)转化为对最小二乘范数解β进行求解,如公式(8)所示。
由此可以得到最小二乘范数解,如公式(9)所示。
式中:H+为H的广义逆。
ELM 的拟合效果只受权值参数的影响且结构简单,克服了传统神经网络结构相对复杂的缺陷。因此,该文采用ELM对通风扇进行故障诊断。
3 通风扇故障诊断模型
3.1 通风扇故障类型编码
该文对滚动轴承进行故障诊断来实现对通风扇的故障诊断,滚动轴承的常见故障主要有外圈故障、内圈故障、保持架故障和滚动体故障,加上正常状态,滚动轴承共有5 种状态,为了方便建模,对这5 种状态进行故障编码,具体见表1。

表1 故障编码
3.2 基于IPSO-ELM 通风扇故障诊断模型
为了提高通风扇故障诊断精度,采用IPSO 算法对ELM的权值进行优化,建立基于IPSO-ELM 的通风扇故障诊断模型,建模流程如图3 所示,主要步骤如下:1)输入样本数据,并将其划分为训练集和测试集。2)确定ELM 网络结构,并初始化ELM 的相关参数。3)利用改进PSO 算法进行搜索,然后把初始解分别带入各ELM 模型中,计算初始解的诊断正确率,即初始适应度值。诊断正确率(适应度值)的计算如公式(10)所示。4)根据公式(3)更新粒子的速度和公式(2)更新粒子的位置,执行算法的迭代过程,每完成一次迭代,根据步骤3 计算一次适应度值。5)将步骤4 中计算得到的新适应度值与最优适应度值进行比较,如果新适应度值比最优适应度值更大,则更新为最优适应度值,反之,则不变。6)判断迭代后的结果能否满足寻优及迭代次数的要求,如果能则结束计算,输出最优参数。7)将步骤6 中的最优参数赋值给ELM,即可对测试集样本进行故障诊断。

图3 模型流程图
式中:χ为诊断正确率;p为样本总量,q为诊断错误的样本个数。
4 算例分析
利用著名的美国西储大学轴承中心的风扇端加速度数据进行仿真分析,轴承型号为6203-2RSH,采样频率为0.12MHz,将外圈故障、内圈故障、保持架故障、滚动体故障和正常5 种状态各100 组数据作为样本数据,其中训练集和测试集样本容量见表2。
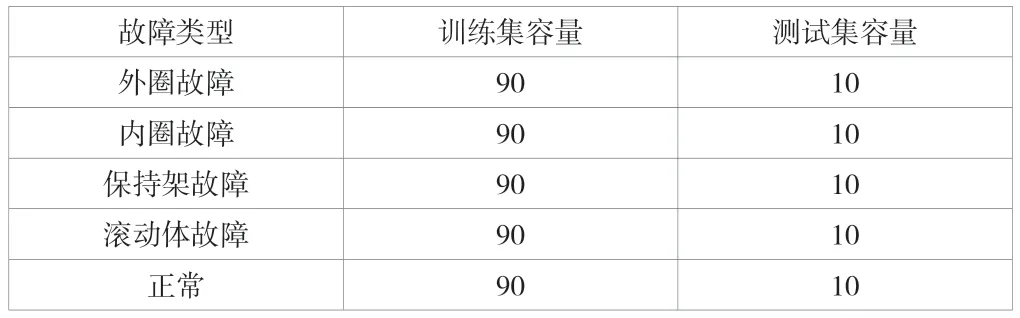
表2 训练集和测试集样本容量
利用上述数据在MATLAB 软件中分别建立基于IPSOELM 的通风扇故障诊断模型和基于PSO-ELM 的通风扇故障诊断对比模型,采用2 种模型对测试集样本进行故障诊断,诊断结果分别如图4、图5 所示。比较图4 和图5 可以看出,IPSO-ELM 模型中只出现了1 次误诊断,将滚动体故障误诊断为保持架故障,诊断效果比PSO-ELM 模型更好。

图4 IPSO-ELM 模型诊断结果

图5 PSO-ELM 模型诊断结果
IPSO-ELM 模型和PSO-ELM 模型对测试集样本诊断结果的正确率见表3。由表3 可知,IPSO-ELM 模型的正确率为98%,比PSO-ELM 模型高出6.52%,由此可见,该文所提IPSO-ELM 模型对对通风扇故障诊断的效果更好。

表3 2 种诊断模型正确率对比
5 结论
该文提出了一种基于改进极限学习机的通风扇故障诊断方法,利用收缩系数对粒子群算法进行改进,采用改进粒子群算法对极限学习机进行参数优化,建立基于IPSO-ELM 的通风扇故障诊断模型。采用实际通风扇故障样本数据进行算例仿真,分析结果表明,该文所提IPSO-ELM 模型在通风扇故障诊断方面的准确率更高。
