飞机主动侧杆非线性系统的建模与控制
2023-11-13王灿杨忠陈旭杨乐杨凯张诚
王灿,杨忠,陈旭,杨乐,杨凯,张诚
1. 南京航空航天大学 自动化学院,江苏 南京 210016
2. 中国航空工业集团公司 金城南京机电液压工程研究中心,江苏 南京 210016
作为飞行控制系统的关键组成部分,飞机驾驶杆的作用是传递飞行员的操纵指令,从而控制飞机的飞行状态。此外,飞机驾驶杆还提供触觉反馈手感,使飞行员能够感知飞机的状态。目前,大多数使用电传操纵(fly-by-wire,FBW)系统的飞机在驾驶舱中配备了侧杆或中央杆,相较而言,侧杆体积小、重量轻、安装方便,可以节省飞行员座舱空间。因为FBW 系统的侧杆和飞机控制面完全分离,所以操纵系统无法反馈给飞行员真正飞行状态的信息,这就可能导致驾驶员动作过快或感知误差,从而导致飞机驾驶性能降低[1]。为了弥补飞行员的“感觉缺失”,提高飞机的操控品质,主动侧杆系统(active sidestick system,ASS)技术应运而生[2-3]。
ASS 可以实时根据飞机的状态调整力感特性,并通过动力加载装置[4]向飞行员提供可变的触觉反馈。这种反馈和飞行器的实际操控过程密切相关,以力的形式作用于驾驶杆,使飞行员能够根据触觉反馈准确快速地判断飞机的飞行状态,从而做出正确的操作,以控制飞机的飞行[5-7]。
根据不同的反馈方式,带有力反馈的ASS 可以分为两类,一是带有自适应飞行提示的侧杆控制器[2],主要通过附加力提示的形式给驾驶员反馈信息;二是基于人感系统调参的智能侧杆,主要通过改变人感系统的刚度,使得驾驶员在操纵侧杆时能够感受到力的变化。针对不同的力提示方式,可以设计不同的控制策略,但ASS 的力提示的实现本质上主要是通过对驱动的控制来进行力反馈,因此研究力反馈的控制是控制策略研究的基础。文献[1]采用力作为输入,形成闭环控制,提出了一种位移–速度–电流三回路PI 控制方法,通过阻抗控制调整参数,并提出了一种解决精确返回中性点位置的累积控制措施;文献[4]采用相似的多回路闭环比例–积分–微分(proportionalintegral-derivative,PID)控制方法,但采用位移作为输入,通过阻抗模型控制期望力;文献[8]给出了5 种ASS 控制策略来对飞机的速度与方向进行控制,并采用模糊逻辑作为选定控制策略的控制器。
ASS 作为有一定复杂度的机械系统,其中存在的非线性因素在实际运用中不可忽略。对于非线性的控制主要有2 种方法:一种是机械方面的调整方法;另一种是控制补偿方法。机械方面主要是通过结构设计与改进加工来消除非线性;控制方面主要是通过设计合适的控制算法对非线性进行补偿和控制[9]。对于主要的非线性因素的控制,国内外学者进行了广泛地研究,对于摩擦的控制提出了自适应控制、滑模变结构控制、模糊控制等[10-11];对于间隙的控制提出了不基于模型的补偿方法[12-14]以及模糊逻辑控制、神经网络和智能萤火虫群算法等智能控制方法[15-17],
针对具有非线性因素的ASS 的建模与控制问题,本文提出了基于鲁棒模糊控制策略的力提示ASS 控制方法。首先建立ASS 及其非线性因素的数学模型;然后设计了ASS 的控制系统,包括阻抗模型曲线、电机控制回路及其控制器算法,以实现力反馈的实时更新;最后通过仿真实验验证了所提出方法对于ASS 非线性系统具有良好的控制性能,并实现了其飞行状态反馈的功能。
1 ASS 数学模型
1.1 电机模型
飞机ASS 的执行器一般选择力矩电机。力矩电机可以为驾驶员提供操纵的动力与反馈力,给飞行员提供实时变化的触觉提示,增强飞行员的情景意识。本文选择三相永磁同步电机(permanent magnet synchronous motor,PMSM)作为提供力反馈的力矩电机,三相PMSM 是一个强耦合、复杂的非线性系统,为了能够更好地设计的PMSM 控制算法,下面为PMSM 建立数学模型。
为了便于控制器的设计,通常选择同步旋转坐标系d-q下的数学模型,其定子电压方程可以表示为
定子磁链方程为
电磁转矩方程可写为
式中:下标d、q分别代表对应轴的分量,ud、uq为定子电压,id、iq为定子电流,R为定子电阻, ψd、ψq为定子磁链, ωe为电角速度,Ld、Lq为电感分量,ψf为永磁体磁链,pn为三相PMSM 的极对数。
1.2 减速器模型
减速器动力学公式为
式中:Jr为减速装置相对于高速侧的惯量,是减速装置高速侧的加速度,Th为高速轴传递到减速装置输入端的扭矩,Tl为低速轴从输出端传递的扭矩减速装置, η为减速装置的效率,i为减速比(i≥1)。
减速装置的输出速度Nl( 低速轴驱动侧的速度)为
式中Nr为减速装置的输入转速(高速轴负载侧的转速)。
1.3 非线性因素建模
ASS 机械结构中,存在着许多的传动机构,在传动过程中系统不可避免地受到非线性因素的影响,考虑的非线性因素有间隙、摩擦。
1.3.1 间隙模型
这类系统的间隙特性应该用死区特性式来描述,具体为
特征的斜率代表了齿轮啮合后的刚度K。因此本项目选择死区模型来进行间隙的建模。
式(1)的间隙与前面的驱动电机和后面的负载是相互耦合的。设电机的控制输入u是力矩,则驱动级的电机和负载的方程为
式中:J1为转动惯量,J2为负载的转动惯量,d2为阻尼系数。这里的数据都是根据减速比折算到系统输出端(θ2)后的数据。
1.3.2 摩擦模型
在机械伺服系统中,摩擦的存在严重影响系统的运动精度,并且,摩擦是存在于系统中的一种非线性现象,对于大多数机械控制系统而言,非线性摩擦难以分析和描述。由于摩擦几乎存在于所有的机械伺服系统中,因此几乎所有机械伺服系统的精密运动皆受其影响,典型的就是当机械伺服系统进行位置调节以及跟踪目标轨迹时,摩擦的存在会给系统带来稳态误差,从而使得控制品质大大降低,进而难以满足机械加工高品质的要求。摩擦模型建立公式为[18]
式中:γ16∈R为未知的正参数,为摩擦力矩。
此模型反映了摩擦的主要特征如静摩擦、库仑摩擦效应、黏性摩擦耗散、Striebeck 效应,为了仿真系统的设计与控制,可以根据需要选择各项,当控制需求高、模型较精确时,采用完整六参数摩擦模型,当控制需求不高或无精确模型时,可以选择无Striebeck 效应的模型。
2 控制系统设计
ASS 系统的控制结构如图1 所示。
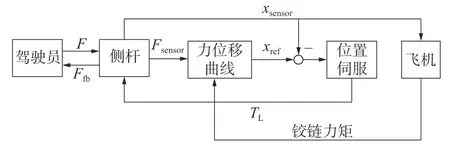
图1 ASS 系统控制结构框图
在这个结构中,侧杆、位置伺服都是系统实际存在的,并且通过机械方式相连;驾驶员在系统外与侧杆直接接触,与侧杆有力的相互作用,同时其输出力是侧杆位移的来源,系统的力反馈也直接通过侧杆作用在驾驶员手上;飞机在系统外接收系统输出位移的控制,并且将铰链力矩传感器的值传递给力位移曲线;力–位移曲线是位置控制与力反馈中重要的一环,主要接收来自侧杆力传感器的值来输出期望位移,同时接收来自飞机状态的信息以实时调整曲线特征。
系统实现的功能主要是2 个:实现来自驾驶员操纵意图的位置伺服、实现基于飞行状态的力反馈。要实现这2 个功能主要依赖系统结构框图中的2 个回路。
2.1 力位移曲线
ASS 的静态杆力梯度曲线特征包括启动力、线性梯度、软止动点和硬止动点等。启动力的设置可在侧杆偏离中立位时,给飞行员一个有力的提醒,不会因飞行员无意识的动作触碰,侧杆产生误操作,可提高飞机的可控性。杆力梯度一般沿以软止动点区分的2 段斜率不同的直线变化,硬止动点一般是机械行程极限。由于本文所述的ASS 可以调整中立位,因此,在中立位调整范围内,ASS 的机械行程极限大于设定的有效行程极限。设置纵轴连续输出力F≤200 N,纵向极限位移xmax=±25°,线性梯度为可变参数,所设计的线性力位移曲线如图2,初始梯度为5.4,极限梯度为7.4,梯度在位移的正负区间一致。
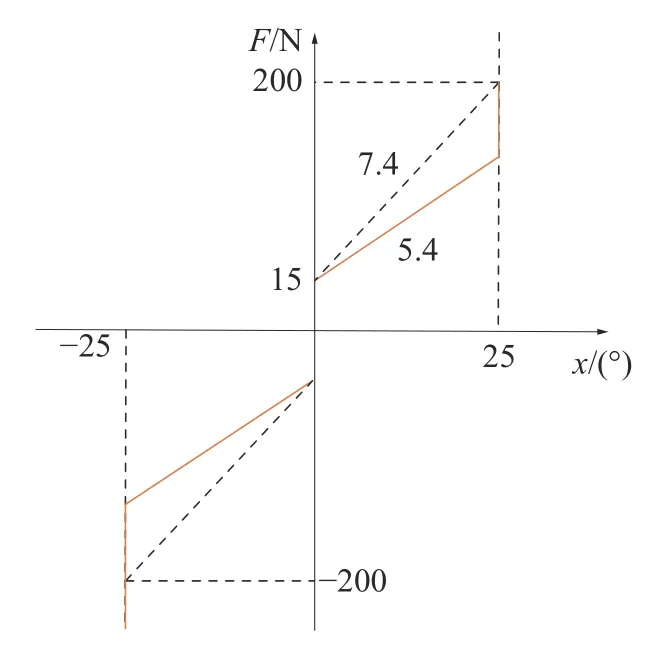
图2 力–位移曲线
由于力–位移模型是以F为输入、xref为输出,因此数学模型描述为
式中a是与飞机状态相关、可以实时调整的常数。在本次研究中我们选定相关联的飞机状态量为飞机升降舵铰链力矩的大小,计算公式为
式中He为铰链力矩的值。
2.2 位置伺服
如图3 所示,对PMSM 的控制采用三环FOC(field oriented control)控制方法,此种方法中的控制器普遍采用传统的PI 调节器,其算法具有简单、可靠性高及参数整定方便等优点。然而,ASS 机械系统中存在诸多非线性因素,传统的PI 控制方法并不能满足实际的要求,因此设计非线性因素补偿修正方法。

图3 三环FOC 控制方法
补偿位置伺服系统反馈通道的间隙非线性,首先得识别此刻反馈通道是否处于间隙区域,要设计补偿PID 控制器就必须对间隙的状态进行识别,根据识别结果调整控制参数。设期望位移与实际位移的差为e,位移变化率为间隙系统所处的状态可分为4 种情况,如表1 所示。
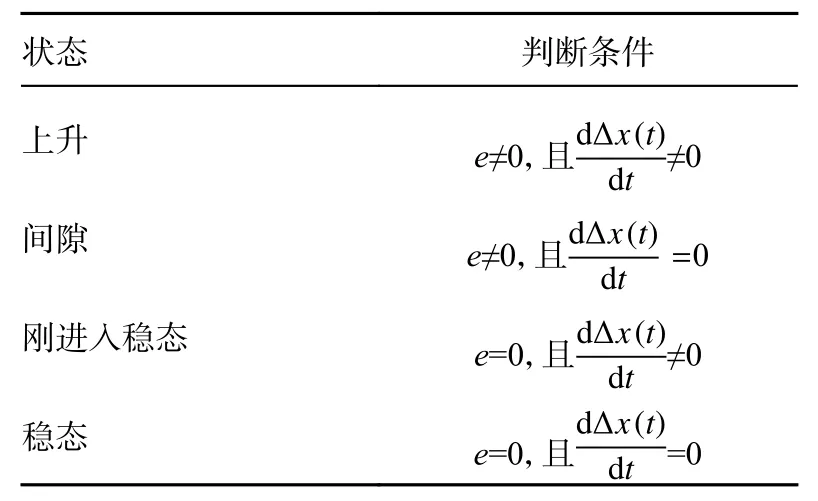
表1 间隙状态
为了在不同的状态对控制参数进行修正以达到补偿非线性的目的,引入具有推理能力的模糊逻辑控制,在线修正控制器参数。以位置误差e及为输入,修正参数∆kp为输出,e的范围为[-0.2, 0.2],e˙的范围为[-2, 2],∆kp的范围为[-200,200],输入、输出的隶属度函数均采用高灵敏度的三角函数,模糊控制器采用Mamdani 型,并采用重心法解模糊,设计模糊控制规则如表2 。
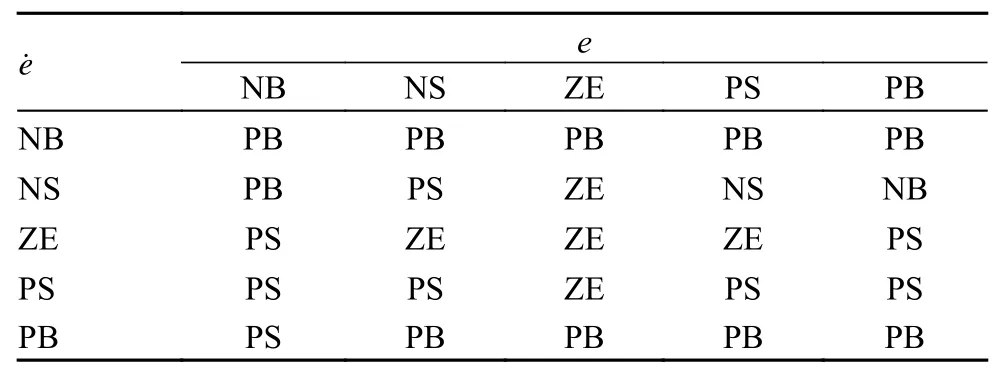
表2 ∆kp模糊控制规则
速度控制器与电流控制均为PID 控制器,初始固定,位置控制器模型为
式中:kp、kd为PID 控制参数;kr为鲁棒项参数,可对摩擦带来的影响进行抑制; ∆kp可对间隙对系统位移的影响进行补偿修正。
3 仿真分析
为了测试所构建的ASS 控制策略的有效性,本文在ASS 的俯仰方向进行仿真实验,其中相应的参数见表3 和表4。控制器参数如表5。

表3 减速机模块参数

表4 电机模块参数

表5 控制器参数
3.1 位置伺服仿真结果与分析
设置间隙模型的刚度为1 000,死区大小为0.1°,摩擦模型的参数如表6 所示。

表6 摩擦模型参数
设置驾驶员输入力使得系统产生期望位移,采用无补偿的PID 控制方法作为对照组,结果如图4~6。从图4 可以看出,在有补偿的情况下,系统在被非线性因素影响而产生误差的短时间内即被控制器补偿,而无补偿的系统则会被非线性因素长时间影响。图5 为控制参数kp+∆kp在运行过程中的变化曲线,可以看出随着系统位置与误差的变化,控制参数在不断适时调整。图6 为反馈力的曲线,系统未设置飞行状态反馈,因此力反馈仅为对驾驶员力的跟随,可以看出对比之下,有补偿时的反馈力没有受到非线性因素影响而产生的明显变化。
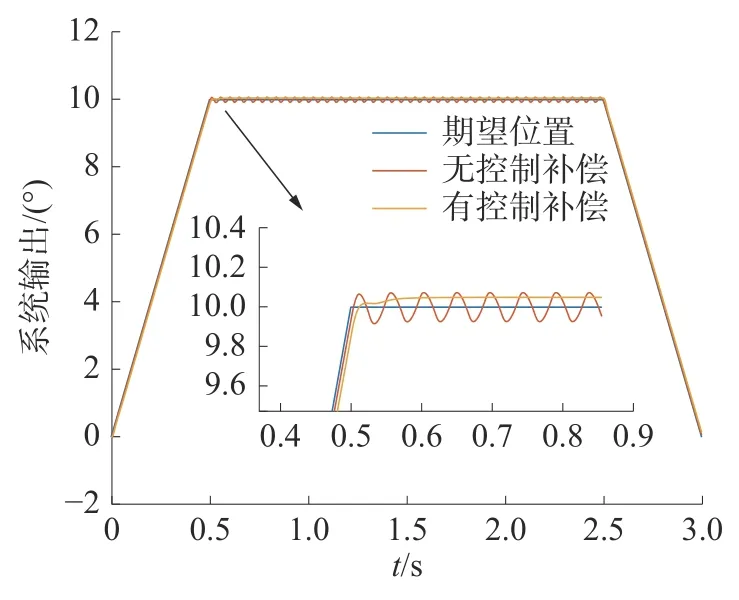
图4 ASS 系统位置伺服仿真结果曲线
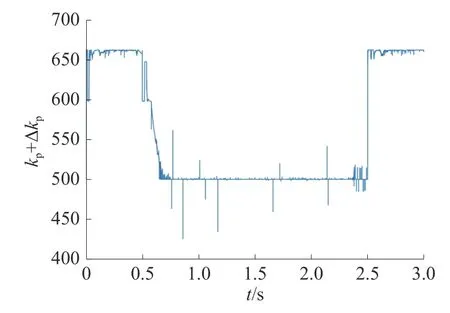
图5 kp+∆kp变化曲线
3.2 力反馈仿真结果与分析
铰链力矩是作用在操纵面铰链线上的力矩,它随进近角、机动面偏转量等飞机状态量而变化。本研究将飞机操纵面的铰链力矩以力反馈的形式传递给飞行员,实现力的感知,这里给出铰链力矩的近似等效数学模型[19]:
式中的 δe不能直接得到,我们用一个因数KδE将飞行员摇杆的位移换算x成飞机升降舵所需的偏转角,公式为
模拟铰链力矩的数学模型在数值仿真环境下搭建,模型相关参数如表7 所示。
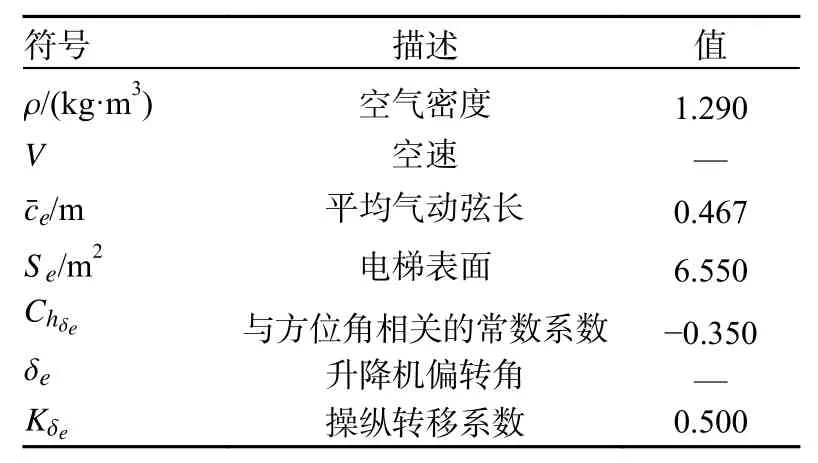
表7 铰链力矩模型相关参数
由式(2)可知,反馈给ASS 的飞行器状态主要是空速和升降舵偏转角。通过以上介绍的实验条件,进行实验验证所设计的ASS 具有定位舵机和反馈飞行状态的能力。
设置如图7 所示的所需杆位移和图8 所示的空速,运行程序,得到图7 的仿真结果。首先,从图7 可以看出, 该系统很好地完成了理想摇杆位置的伺服控制,跟踪速度误差在0.1 s 以内,无超调、跟踪精度高、跟踪速度稳定。这也证明了位置伺服功能的有效性。
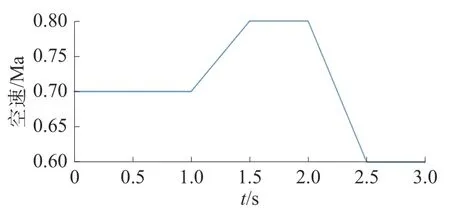
图8 空速曲线
从图8 和图9 可以看出,在给定空速后,铰链力矩的变化导致梯度变化系数a平行变化,并将这种变化反映给飞行员的反馈力。这证明了反馈飞机状态功能的有效性。
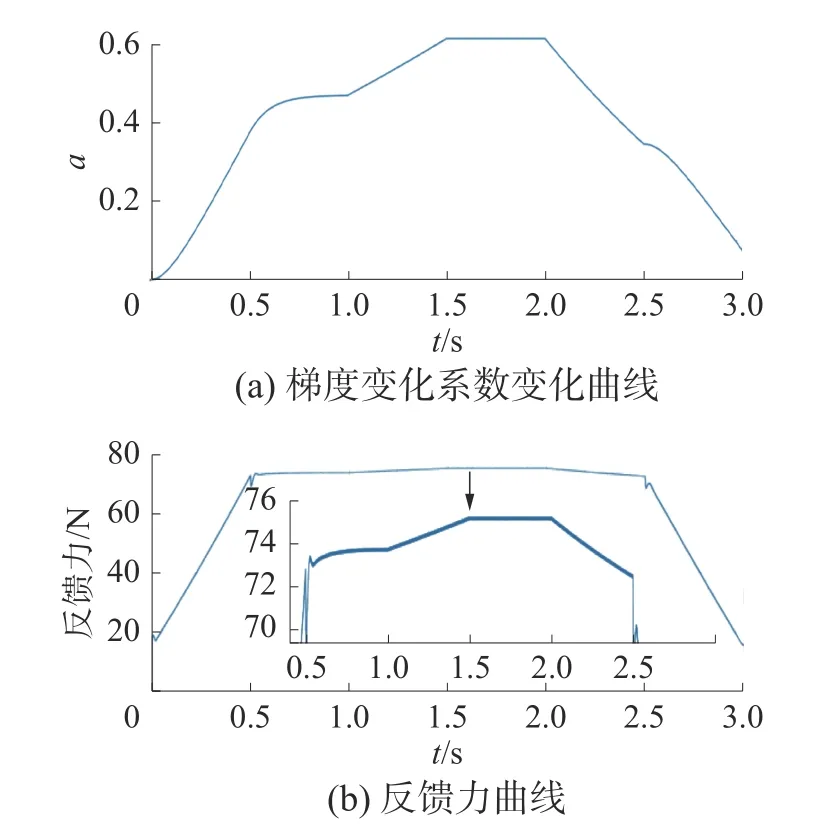
图9 梯度变化系数 a与 反馈力跟踪曲线
4 结束语
本文对所提出的飞机主动侧杆非线性系统的模型与控制方法进行了研究,建立了相应的数学模型并设计了基于模糊鲁棒控制方法的控制系统。仿真结果表明,系统可以对主动侧杆非线性系统进行稳定的位置伺服,对其中的非线性因素进行补偿。另外,系统可以完成对驾驶员输入的跟踪,并在此基础上将飞机的飞行状态以力提示的形式反馈给飞行员从而提高飞行员的情景意识,以提高飞机的飞行品质。结果验证了所设计的控制方法的稳定性,未来工作重点将放在针对主动侧杆的智能控制方法的研究上。
