五孔探针高精度大气数据采集系统设计
2023-11-13黄振峰贾继阳厉金鹏覃泽龙
梁 巍,黄振峰,贾继阳,厉金鹏,覃泽龙
(广西大学 机械工程学院, 南宁 530004)
0 引言
随着科学技术和航空事业的飞速发展,飞行任务更多且更艰巨,情况更复杂,这对飞行控制提出了更高要求[1]。飞行控制系统包括飞行控制计算机、舵机航向系统、IMU惯导系统、GPS定位系统以及大气数据采集系统等[2]。其中,大气数据采集系统是飞行控制系统中必不可少的一个组成部分,五孔探针根据气压传感器测量的大气静压、大气温度和大气总压经过数据解算之后得到的高度、空速、迎角、侧滑角等数据为飞行控制计算机提供了实时的大气数据信息,是进行飞行控制的重要依据[3]。
传统大气数据采集系统中的风标迎角传感器结构简单,安装简便,但响应速度慢,且对翼面加工要求较高[4],针对传统的大气数据采集系统更新速率慢,精度较低的不足,飞控系统对五孔探针大气数据采集系统提出了高精度、高通信速率、信号抗干扰能力强、高可靠性和体积小、质量轻等高集成度的要求,本文中根据飞行控制和五孔探针大气数据采集原理,设计了一个基于FPGA+DSP的五孔探针大气数据采集系统,并对系统的硬件设计和软件设计进行了分析研究和实验验证,提高了整体系统的通信速率及数据采样精度。
1 大气数据采集系统测量原理
完整的大气数据采集系统一般通过传感器测得的大气静压、动压(总压)、温度、指示攻角以及气源误差修正等信号,经过数据解算得到大气高度、指示空速、大气总温、气压高度变化率、马赫数等数据,以供执行飞行任务时对无人机飞行状态实时监测及精确控制[5]。根据某型无人机的设计任务需求,本系统主要测量参数为大气静压、动压、温度,输出信号为大气高度、指示空速、迎角及侧滑角等[6]。
本系统数据传输流程大致如下:FPGA模块读取多路传感器同步采集到的数字信号,之后将原始数据打包成数据帧,传输至DSP中解算成大气高度、指示空速、迎角、侧滑角等飞控系统需要的数据,最终按照双方协议格式发送至飞控计算机,在飞控计算机中进行实时监测与控制[7]。数据传输流程框图如图1所示。
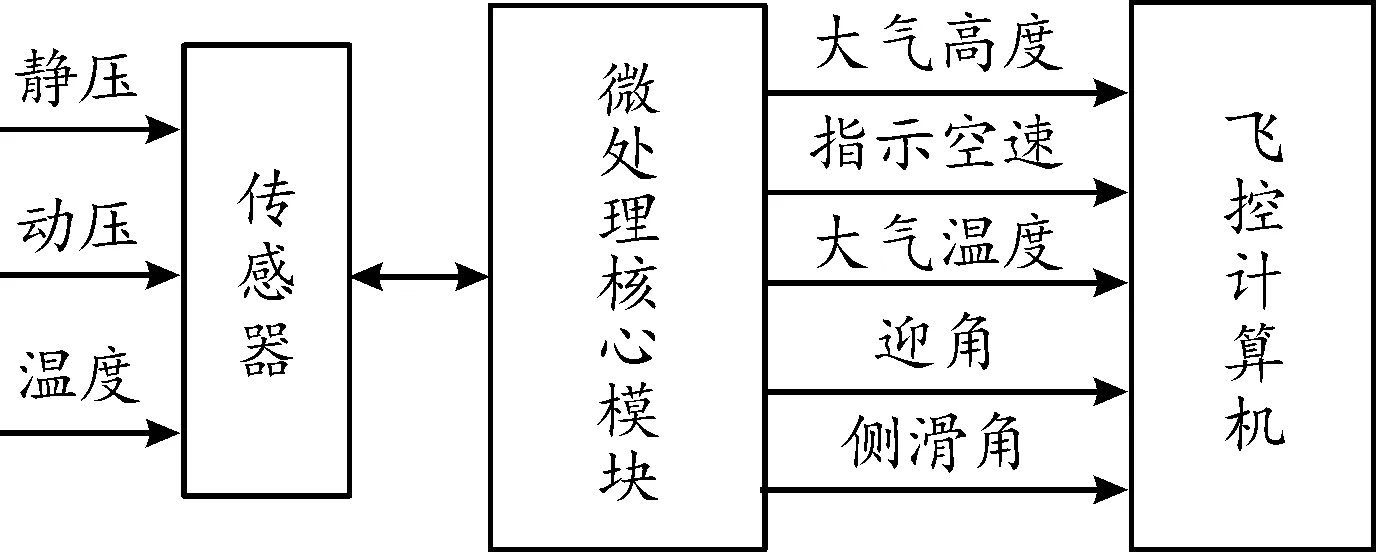
图1 数据传输流程
1.1 大气高度测量原理
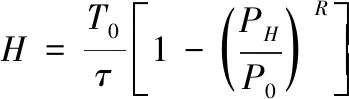
无人机进行飞行测试时一般处于对流层,即高度低于 11 km,大气高度和大气压的关系可用以下公式表示为[8]
(1)
式(1)中:H为大气高度,m;T0=288 K为标准大气下海平面的温度;τ=6.5×10-3K/m为温度变化率;PH为当前高度对应的大气静压,Pa;P0=101.325 kPa为标准大气下海平面的大气静压;R=287.052 87 m2·K-1·S-2为空气气体常数,则最终适用计算公式为

(2)
1.2 指示空速测量原理
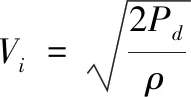
在飞行高度小于11 km,非真空的环境下,指示空速可直观地表示空气动力学大小,即本文提到的空速。根据不可压缩流体伯努利方程,指示空速与动压计算关系为
(3)
式(3)中:Vi为指示空速,m/s;Pd为传感器测得的动压,Pa;ρ为当前大气密度,kg/m3。而大气密度与大气静压和大气温度的关系为
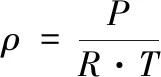
(4)
式(4)中:P为当前大气静压,Pa;T为当前空气温度,K。
考虑到以下2个因素:1)大气高度计算公式较为复杂,单模块运行时系统整体通信速率在设计需求范围内,若增加系统复杂性,需综合考虑系统耗时增加的问题;2)大气密度、大气总温等参数会随着气压高度变化而改变,对大气静压的计算产生误差。本系统将结合国际标准大气表对大气静压、气压高度和动压进行线性插值,以减小大气密度和温度误差对计算结果的影响,在保证精度的前提下提高系统运行效率[9]。
1.3 五孔探针校准测量原理
五孔探针是一种根据压差比计算来流方向及角度的气动探针,常用于流体测量,相关研究都比较成熟。五孔探针的校准是一项关键技术,五孔探针的测量精度很大程度取决于校准时的模型搭建是否符合五孔探针实际情况。由于每一枚探针的加工必然存在机械误差,因此即使是同一批次生产的五孔探针,也需要对每一枚探针进行标定校准,确定探针校核系数与角度之间的关系,才能用于角度测量。
五孔探针分区原理图如图2所示,为了方便表示,将5个孔分别标号为1、2、3、4、5。5个小孔对应的管路分别通过尾部引压管与五路差压传感器正端相连来测量探针头部表面的动压,校准时,将五孔探针置于流场中,开孔方向朝向来流方向,以探针头部球心为中心,通过给定角度指令控制电动转台以获取不同角度下各孔的压力值,根据各孔压力的压差比,可得到不同角度下五孔探针的校正系数Kα、Kβ[10],分别对迎角、侧滑角采用曲线拟合方法搭建数学模型,确定角度与校核系数之间的拟合函数α—Kα、β—Kβ关系,并写入嵌入式系统中,根据校核系数反求角度值。
当五孔探针位于中心位置时,中心孔P2压力最大,随着测量角度逐渐增大,最大压力的感受孔将从中心孔移至正对来流方向的侧边孔。因此根据压力的变化规律,可将感受孔划分为5个区域,即一个内区和4个外区,4个外区各占90°的扇形区域。
对于内区(0<α<22.5°,0<β<22.5°),定义为

(5)

处于内区时,中心孔与侧边孔压力差变化较小,因此选用对侧孔压力差作为分子,能较为直观地观察数据变化情况。
对于外区(22.5<α<45°或-45<α<-22.5°,22.5<β<45°或-45<β<-22.5°),由于在大流动角下探针有2个孔位于分离区内,因此必须用迎风面的3个孔来确定来流方向,即
(6)
(7)

(8)
(9)
式(6)—式(9)中:Kα1、Kα2分别为迎角正、负向校核系数;Kβ1、Kβ2分别为侧滑角正、负向校核系数。
2 系统硬件设计
为了满足体积小、高精度、抗干扰、多路同步采样的需求,系统设计的硬件电路设计框图如图3所示。系统通过电源模块给核心板、串口模块以及传感器模块供电;FPGA+DSP核心板部分为数据采集和数据处理核心模块;压力传感器模块将大气中的数据采集至传感器芯片中,由FPGA同步读取;两路串口及测试信号接口可供系统将大气数据传出,用作数据测试及验证。

图3 硬件电路框图
数字式MEMS传感器连接五孔探针采集大气中的静压、动压和温度的模拟信号,其内置的ADC转换芯片将转换后的电信号经过通讯隔离芯片传输至FPGA芯片中,FPGA经过组帧后再通过EMIF接口将数据传输至DSP芯片中进行数据解算,最后通过串口通信将解算后的数据发送至飞控上位机。
2.1 数据采集模块
根据嵌入式系统要求,本系统的绝压传感器选用了高分辨率、高精度的数字式传感器MS5803-01BA。该产品支持SPI和IIC通信方式,并可根据用户需要自由配置模式以及采样率,其内置的ADC转换模块可提供24位的压力和温度数字值[12],分辨率分别可达0.01 m和0.01 ℃。
差压传感器部分选择的是MS4525DO传感器,该产品由2个孔径只有2.1 mm的探头来采集压力数据。其同样支持SPI和IIC通信方式,内置的CMOS调节电路和ADC转换芯片可将压力数据输出为14位数字值,完全校准时,精度可达0.25%最大量程误差带。
本设计中,MS5803和MS4525DO传感器均采用滤波后的+3.3VD电源供电,与核心板的+3.3 V相隔离,减小电气干扰。MS5803和MS4525DO传感器还具有体积小、集成度高、操作方便等优点,其电路原理图如图4所示。
2.2 通讯隔离模块
为了减小噪声以及电磁干扰,通讯隔离模块选择光耦隔离芯片TLP291-4。TLP291-4由一个四通道的光电晶体管和红外发光二极管组成,符合SPI的四线制通信,适用于高集成度、高精度的精简电路设计中,提高通讯质量及可靠性。
2.3 核心处理模块
现场可编程门阵列FPGA芯片spartan-6具有超过40个I/O、多个FIFO存储器、多个RAM存储器和ROM存储器等,可供多路数据的同步读写传输和保存。其通信速率可达到7.5 Mbit/s或更高[13]。
DSP选用的是TI公司的TMS320F28377D双核微控制器,拥有强大的计算能力,可以计算更复杂的公式,同时处理多路数据的解算。
FPGA和DSP间的通讯采用的是EMIF(外部存储器接口)协议,本质是使FPGA充当DSP的一个高速数据传输、协同处理平台。
2.4 串口通信模块
串口通信模块选择的是带隔离的ADM2582E芯片,该芯片是完全集成的信号和功率隔离数据收发器,配置输出为RS-485或RS-422接口,适用于多点传输的高速通信,可有效抑制共模干扰。
3 系统软件设计
3.1 软件部分整体设计
系统的软件设计主要分为FPGA与传感器的通信部分和DSP的数据解算部分。FPGA与传感器间的通信采用的是SPI协议,用户可以根据设计需求自行设置通信速率及SPI通信模式,FPGA是时序控制,可以实现多路数据高速同步采集。DSP中首先需要将24位数字采样值转换成浮点型计算值,根据写入DSP程序的五孔探针模型解算出需要的空速值及角度值,再经过二阶温度补偿和滤波算法后[14],将需要输出的数据根据协议打包成数据帧发送。
3.2 数据采集模块
数据采集模块通信速率由FPGA产生的SCLK时钟自行控制,在一个SCLK时钟周期内可实现一位数据同时发送和读取。系统由FPGA同时发送读取数据的指令给五路传感器,传感器收到指令后将指令对应寄存器的数据返回给FPGA,按地址保存在FPGA的RAM存储器中供DSP读取。为避免多路数据采集出现数据竞争情况,FPGA内设计了多个FIFO和RAM的IP核模块以缓冲数据,并且能够起到时钟同步的作用,FPGA程序框图如图5所示。
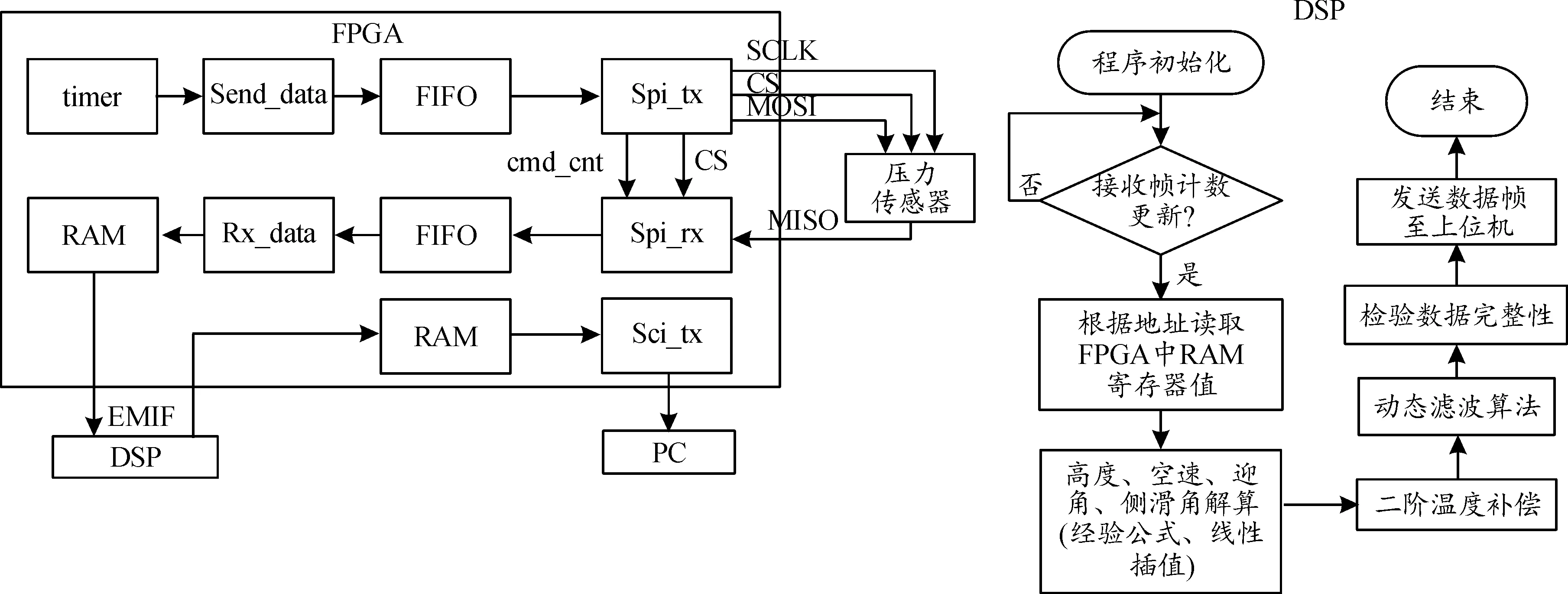
图5 微处理器程序框图
3.3 模型搭建与数据解算
FPGA端将发送数据存入RAM对应地址后,DSP通过EMIF收到双方握手信号后开始接收数据,并通过判断接收帧计数是否更新来进行数据的解算,每接收一帧完整数据执行一遍解算程序,包括线性插值运算,二阶温度补偿和滤波算法等,整个程序运行时间不超过50 μs。DSP数据解算程序框图如图5所示。
3.3.1角度解算模型搭建
在使用五孔探针进行测量前,需要先搭建五孔探针模型,由于理论研究的难度较大,目前只针对实验校准来对五孔探针模型的搭建进行分析研究[15]。该过程需先对五路动压传感器分别进行标定,后进行多路一致性标定,测量各个角度下各孔的动压值,可得到角度值与校正系数的关系并通过线性插值等方法得到拟合曲线。
为避免高流速、大流动角下处于分离区的感受孔由于气流不稳定产生压力突变的情况,克服巨大工作量带来的困难,可以根据实际情况,对校核系数进行优化,引入新的校核系数Kα,β,新的校核系数Kα,β应符合如下要求:
1) 能够有效地反映流场速度、角度变化对探针动态性能特性的影响;
2) 能够有效地减小孔位之间压力互相影响;
3) 能够在保证测量精度的前提下,减小工作量。
本系统设计的五孔探针校正系数Kα,β与压差比的关系可表示为
(10)
式(10)中:Kα,β为新五孔探针校正系数,无量纲;P2表示中心孔2孔压力,Pa;Px表示P1,3,4,5某孔压力,具体选取哪个孔计算可根据安装位置及转动角度方向判断,Pa;Ps为当前大气静压,kPa。
在探针校核标定过程中,结合Kα,β,可以有效地简化高流速、大流动角的流场下五孔探针的动态性能测试工作,节约了大量的时间,降低了工作成本。并且取消侧边孔平均值这一项式,利用直接测得的大气静压对校核系数进行补偿,可有效地减小处于分离区孔位压力值对迎风面孔位压力值的影响,对传感器精度要求较高。
各差压传感器及五孔探针进行标定之后,根据五孔探针标定时搭建的模型,可用全对向测量法对迎角、侧滑角进行校验,即将五孔探针置于流场中,转动至任意角度,可根据此时的压差比计算出当前α、β角度值。本系统中搭建的五孔探针校正系数模型为

(11)

(12)
式(11)—式(12)中:α、β分别为迎角、侧滑角,(°);Kα、Kβ分别为α、β角的校正系数,无量纲。
3.3.2滤波算法
滤波算法方面,式(13)、(14)为一阶低通滤波差分方程,由于一阶滤波算法的局限性在于如设置滤波带宽越小,滤波效果越好,则滞后更严重。因此本系统在去尖刺滤波的基础上,采用动态调整滤波参数的滤波算法,即数据平稳时选择低带宽参数,数据快速变化时选择高带宽参数,在保证滤波效果的同时,极大缩短了滞后的时间,保证了数据显示的实时性和可靠性,有效提高系统精度。
y=k1·y0+k2·(u+u0)
(13)
(14)
式(13)—式(14)中:Fb为截止频率,Hz;Ts为采样周期,s;y为本次滤波值;y0为上次滤波值;u为本次采样值;u0为上次采样值。
滤波比较结果如图6所示,结果显示,低带宽滤波对高频噪声有更好的滤波效果,但数据滞后明显;高带宽滤波的滞后时间更短,但滤波效果不理想。动态滤波可以很好地综合两者的优点而减小缺点的影响,是提高系统精度及通信速率必不可少的一环。
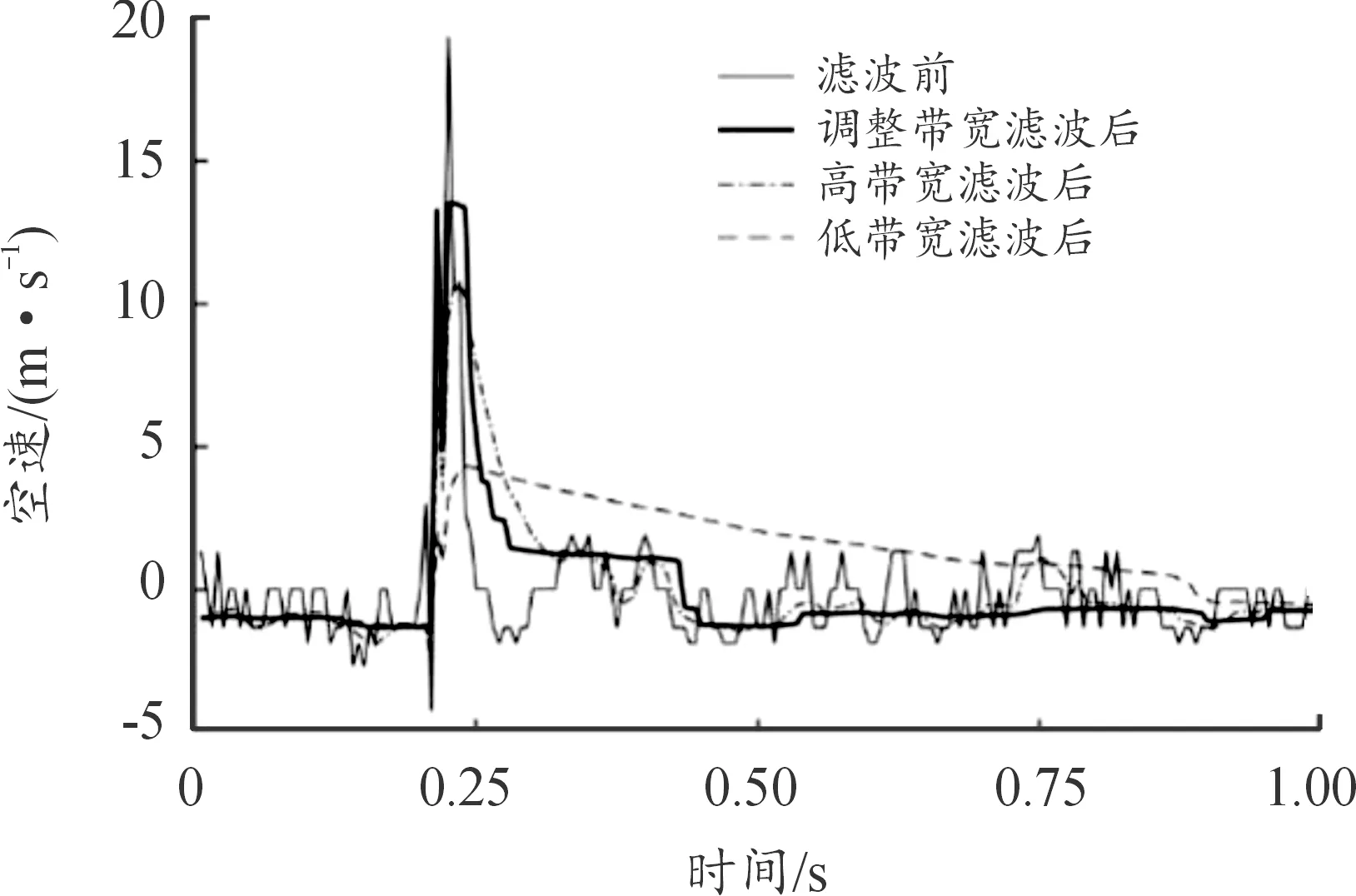
图6 滤波算法比较结果
4 测试结果与分析
系统实物搭建如图7所示,系统主要由2部分组成,即五孔探针机械结构和传感器PCB通信板,在本系统的基础上,进行了多组实验验证。
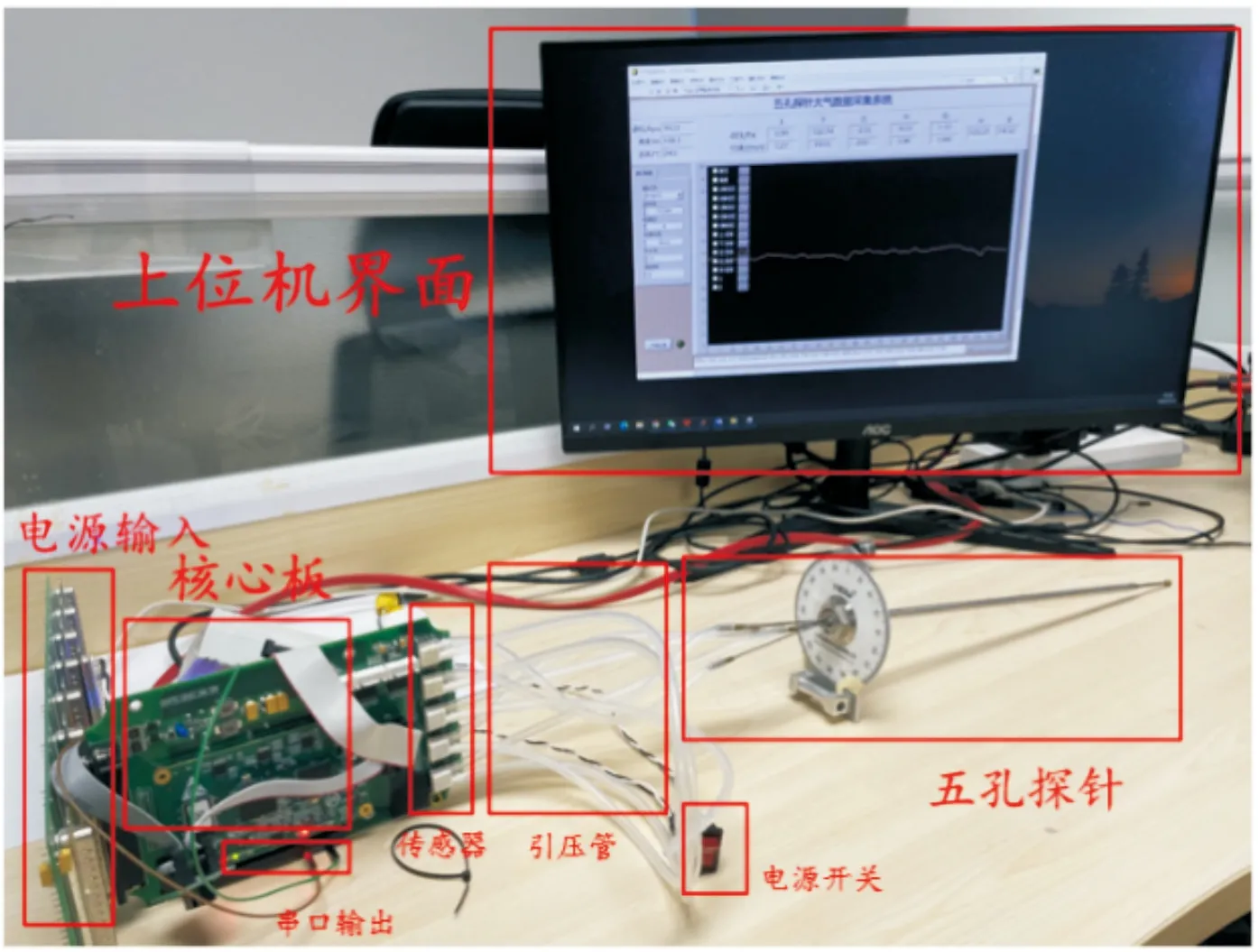
图7 五孔探针系统实物图
4.1 气压高度测试
气压高度测试地点选择北京海淀区某大厦,其一层的海拔高度为55 m,标准层高为3.5 m。为保证测量稳定性及精度,在每个楼层停留20 min取测量平均值作为计算值,部分测试数据如表1所示,气压高度的平均误差为0.058 5 m,平均相对误差为0.552%。气压高度数据是后续其他实验最基础也是最重要一环,气压高度的精度决定了后续实验的最低精度。
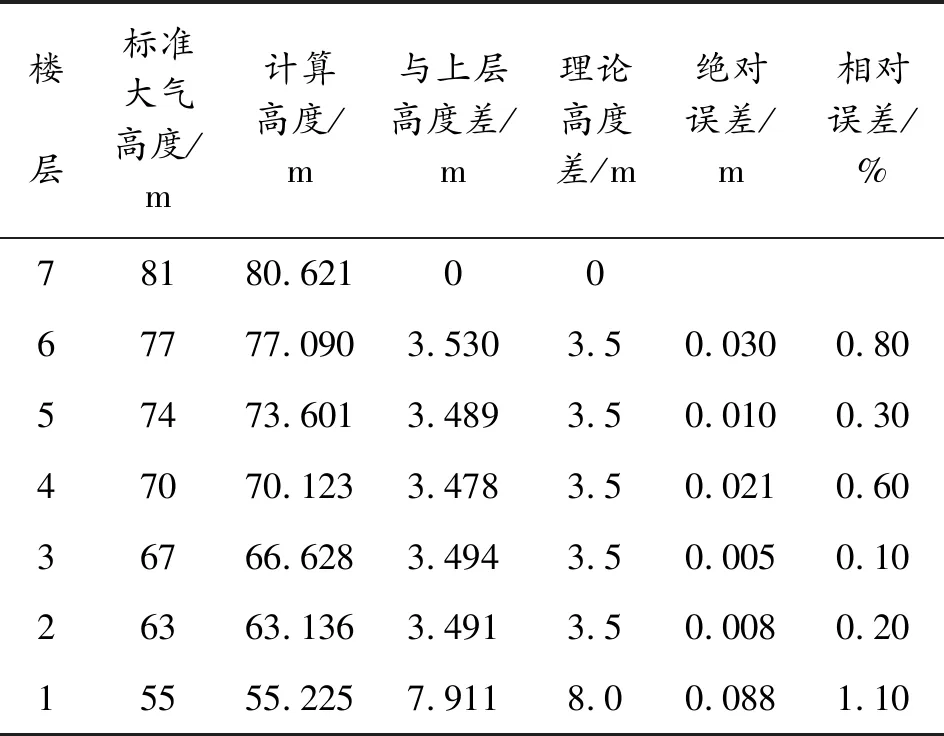
表1 各楼层气压高度测试结果
4.2 迎角、侧滑角测试
由于五孔探针五路差压传感器压差比与空速差比的关系相同,故实验过程选取经过补偿及滤波计算后的空速值进行计算比较。
在多路传感器完全标定验证正确的情况下,为减小五孔探针摆动时因机械结构产生的干扰,迎角与侧滑角测试方式采用半对向测量法[16],即将五孔探针置于流场中,开孔方向朝向来流方向,控制电机以探针头部为球心,通过改变来流方向调整角度大小。测量迎角α时,使4、5孔空速保持一致,改变α角至任意角度,观察1、3孔空速变化规律。试验以高精度旋转变压器测量结果为标准,对不同速度下传统迎角传感器与系统搭建模型各角度进行多组测试试验,侧滑角β测试过程同理。
测试过程为将五孔探针与传统风标迎角传感器置于同一流场中,尽可能使其处于相同状态,不断改变来流方向,即迎角α大小,同时采集二者测量的空速与角度值并解算。以给定旋转变压器角度为基准,某次测试结果如图8所示,本次试验中,依次将α角调整至+10、+15、+20、+15、+10、+5、0、-5、-10、-15、-5、0、5°,为保证读取数据稳定,每调整一定角度保持5s取平均值,记录数据并验证。最终迎角(α)、侧滑角(β)多组试验结果如表2、表3所示。
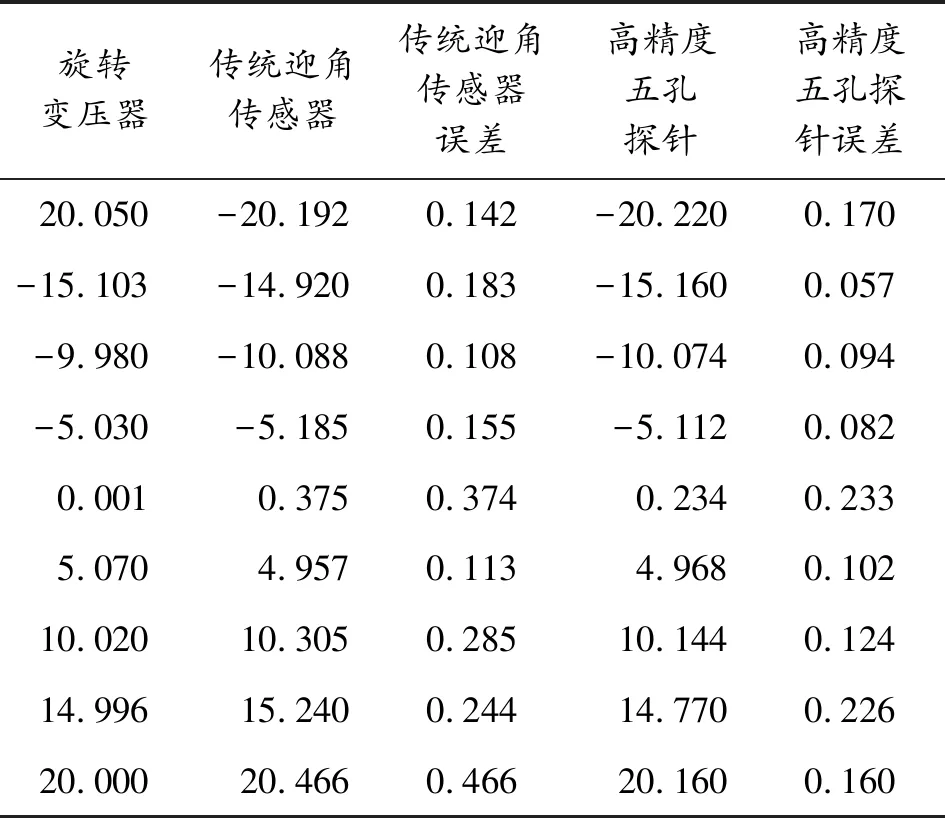
表2 迎角α测试结果
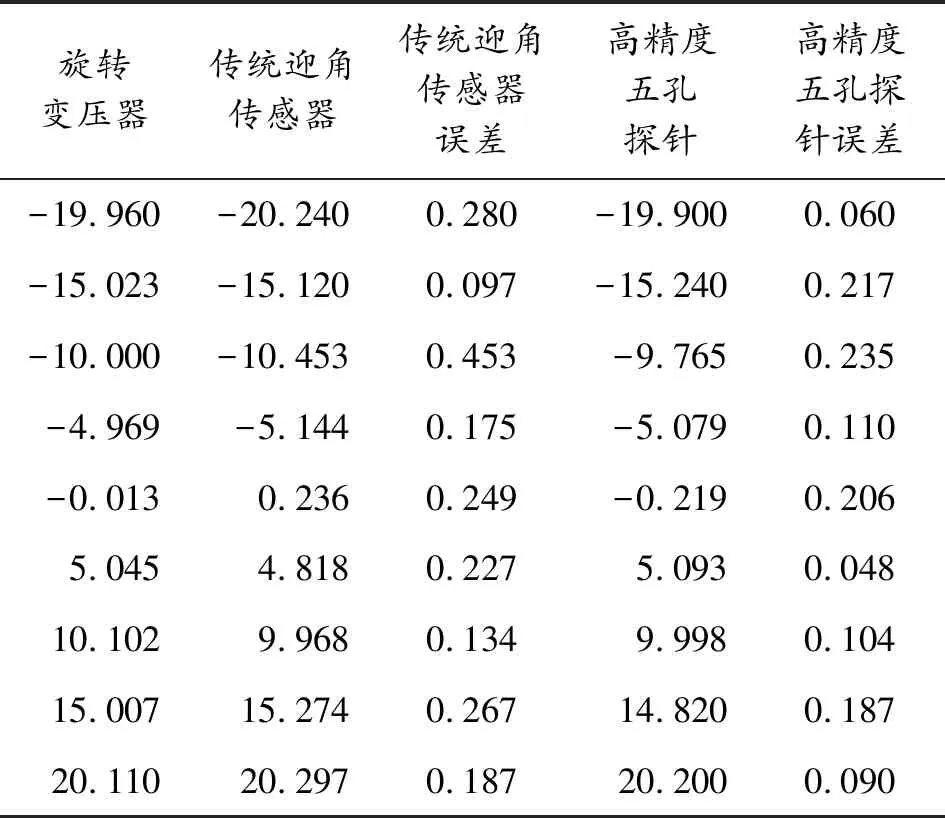
表3 侧滑角β测试结果

图8 迎角测试过程
测试结果显示,采样频率由传统迎角传感器的10 Hz提升至100 Hz。迎角、侧滑角测量平均误差可控制在0.139°~0.162°内,平均相对误差在0.013~0.018内,误差范围减小近60%,可以实现精度更高的测量。由于每一枚五孔探针的机械结构必然存在偏差,本系统力求对生产合格的五孔探针提高数据测量的精度与可靠性,机械误差不可避免。未来提高精度的方向可放在五孔探针及引压管材料加工上,不过这必然会提高系统成本,还需要综合考虑。
实验证明,相比于传统迎角传感器,本系统测试结果迎角、侧滑角的数据传输速率更快,测量精度更高,有利于飞控系统对飞行状态及时判断,做出正确决策,满足飞控系统对大气数据采集系统的精度要求。
5 结论
本文中提出一种五孔探针高精度大气数据采集系统,针对传统迎角传感器的不足做了硬件及软件上的重新设计与研究。系统对气流响应速度更快,角度测量精度更高,通信板尺寸仅有100 mm×80 mm×20 mm,质量不超过250 g,结构更紧凑,质量更轻。经过系统设计、数据标定与实验室平台实物验证,证明本系统满足无人机五孔探针数据采集系统的高精度要求,为整个飞控系统提供了可靠的数据支撑,能够有效地帮助飞控系统进一步地监测、优化与控制,更高效地执行飞行任务,减小发生故障的概率,能够为五孔探针的研究与发展提供有效参考。不足之处在于由于实验条件有限,未能针对超高速流场及无人机样机实飞进行测试试验,接下来将从这方面展开深入研究分析。
本文中设计研制的五孔探针大气数据采集系统提供了一套体积小,易操作的飞行测控平台,不需要特殊场地及实验条件,可以容易地安装在中小型无人机上,完成多种空气动力试验,有着非常多的应用前景,对于进一步提高无人机执行飞行任务能力具有积极意义。
