机载毫米波雷达反演降水性积层混合云暖区液态水含量及其与飞机观测的对比*
2023-11-12黄兴友孙鸿娉王玉莹李培仁
杨 晓 黄兴友 孙鸿娉 王玉莹 李培仁
1.山西省人工影响天气中心,太原,030032
2.中国气象局云雾物理环境重点开放实验室,北京,100081
3.人工影响天气山西省重点实验室,太原,030032
4.南京信息工程大学大气物理学院,南京,210044
5.山西省气象学会,太原,030000
1 引言
积层混合云是华北地区最主要的降水云系之一,它的形成、发展除了受动力、热力条件影响外,其内部的微物理过程也起着重要作用(孙旭映等,2013),液态水含量是云微物理过程的重要参数之一,研究其分布及演变规律,对气候变化、天气演变、人工影响天气和飞行安全等方面都有重要的应用价值(Quante,2004;Stephens,2005)。飞机是观测云参数的最佳平台之一,通过搭载云微物理探测仪器在云中飞行探测,可直接获取云的宏观和微物理结构,且时间、空间分辨率都比较高。但是飞机观测也有其不足之处,获得的数据资料有限,通常得到的是航路上一维的云微物理特征,难以获得云系内物理量的垂直分布和水平分布。对于云发展和演变的研究来说云特性的垂直分布更值得探测和研究。若想利用飞机探测获得云层液态水含量的垂直廓线,则可能需要多架次飞机联合探测,分别在不同高度上同时穿云探测,国内虽然进行过几次这样的大规模科学试验,但也仅有几次,因为组织难度大、成本高、限制因素多。
如果能利用云层的雷达反射率因子(Z)反演出液态水含量(Liquid Water Content,LWC),则利用雷达的垂直探测数据就可以得到云液态水含量的垂直廓线。Atlas(1954)就提出雷达反射率(Z(mm6/m3))与液态水含量(g/m3)存在简单的指数函数关系(Z=a×LWCb),并根据飞机实测的粒子谱参数得出雷达反射率因子与云粒子有效半径,以及Z与云内液态水含量的经验关系。Sauvageot 等(1987)也得出了适用于积云和层积云的Z-LWC 经验公式,并提出-15 dBz 作为降水粒子和非降水粒子的回波强度界限;Kropfli 等(1990)利用一部地基35 GHz 雷达也做过类似研究。Frisch等(1995)、Sassen 等(1996)、Fox 等(1997)、Baedi等(2000)、Krasnov 等(2005)都进行了Z-LWC经验关系的研究,结果见表1。这些研究进一步说明了获取云层LWC 的重要性,但是,这些经验公式大多适用于云滴尺度较小的非降水云,要得到适用于降水性积层混合云的雷达反射率因子Z与液态水含量LWC 的经验公式,还需要通过对大量的飞机观测数据和雷达数据的拟合计算。

表1 Z-LWC 经验公式系数Table 1 Regression parameters of the Z-LWC relationship
Ka 波段多普勒雷达能够有效地探测云体的雷达反射率因子、径向速度和速度谱宽,韩颂雨等(2017)、黄书荣等(2017)、吴琼等(2018)、岳治国等(2018)、黄兴友等(2019)利用毫米波雷达数据对云微物理参数进行了反演。地基平台的Ka 波段雷达采用天顶指向的观测模式时,可以得到雷达上空云参量的垂直分布,但不能对偏离雷达上空位置的目标云体进行探测。如果利用机载毫米波雷达,则可以进行穿云探测,容易针对目标云体开展试验研究。因此,机载平台是较理想的云观测平台之一(Lhermitte,1990;Krofli,et al,1996;Kollias,et al,2007),Sadowy 等(1997)在CLEX、SALPEX、MCTEX、UMass/JPL 等大型试验中使用了机载平台,搭载了毫米波雷达及其他仪器。常用的机载测云雷达有波长约3.2 mm 的W 波段雷达和波长约8.5 mm 的Ka 波段雷达,虽然W 波段具有更强的探测小云粒子的优势,但成本高、受到大气和降水的衰减更强,并且不适合探测较大的云粒子(直径不超过200 μm),相比较而言,Ka 波段电磁波受大气和降水的衰减较弱,可以探测更大直径的云粒子(500 μm 以上),更适合探测降水性积层混合云,或用于人工影响天气的作业条件和作业效果研究。因此,中国的机载云雷达都是Ka 波段,简称KPR(Ka-band Probe Radar,Ka 波段探头雷达,或Ka-band Precipitation Radar,Ka 波段降水雷达),并进行了相关探测和研究,Zuo 等(2021)采用融化层的自适应回波衰减订正法对KPR 的回波衰减进行了订正,Sheng 等(2022)利用飞机搭载云微物理探头和KPR 研究了中国北方大陆性积云的微物理结构和垂直演变特征,Wei 等(2022)使用机载Ka波段雷达和滴谱仪对降水积云的微物理参数进行了探测和研究,左懂飞等(2022)对KPR 的数据进行了一定的质量控制,包括高斯滤波去噪、飞机轨迹的订正以及多普勒速度和谱宽的订正。本研究利用搭载了Ka 波段毫米波雷达和DMT 公司的云雨滴谱测量设备等仪器的机载综合观测平台,获取了包括雷达反射率因子的垂直分布以及云雨滴谱数据,建立了雷达反射率因子Z和液态水含量LWC的经验公式,是适合中国降水性积层混合云的第一个Z-LWC 关系式。利用这个公式,可以根据雷达探测的Z廓线而反演得到云层LWC 的垂直分布,用于云特性研究和人工影响天气作业效果评估。
2 飞机观测
2.1 主要仪器及探测原理
机载观测平台是在国王350 飞机上搭载美国DMT(Droplet Measurement Technologies)公司的机载云物理探测系统,包括云粒子探头CDP(Cloud Droplet Probe)、云粒子二维图像探头CIP(Cloud Imaging Probe)以及综合气象测量设备AIMMIS和Ka 波段紧凑型雷达KPR(Ka-band Precipitation Radar)。CDP 和CIP 粒子探头目前已被广泛用于云微物理特征的探测研究中,北京(马新成等,2021)、河南(龙玉燕等,2022)、河北(朱士超等,2014;亓鹏等,2019;Hou,et al,2021)、山西(李义宇等,2012;孙鸿娉等,2014;封秋娟等,2021)等多地均已使用DMT 的各种粒子探头对不同类型云进行了探测。CDP 用于测量小云滴的尺度谱分布及数浓度,探测直径范围为2—50 μm,共分30 个直径档,前12 个档的测量分辨率是1 μm,13—30 档为2 μm,采样面积约0.24 mm2。CIP 可探测直径12.5—1562.5 μm 的云粒子,共有62 个直径档,直径档的间隔是25 μm。CDP 和CIP 两个探头的联合探测,可获取2—1562.5 μm 粒径范围的云粒子信息,包括粒子数浓度、谱分布或图像等,以此信息为基础,可计算出云中液态水含量、有效粒径、反射率因子等参量。
机载综合气象测量设备AIMMIS-30 是加拿大Aventech Research 公司生产的,主要是用于测量温度、湿度、空气的静态气压和动态气压、风向、风速、GPS 轨迹(包括精度、纬度和高度)等,其中风速包括南北向水平风速、东西向水平风速和大气垂直速度。
机载紧凑型Ka 波段雷达KPR,是由美国Prosensing 公司开发的一款安装在机翼上的插拔式雷达,外形见图1(Pazmany,et al,2018),雷达参数见表2(Pazmany,et al,2018)。雷达工作的Ka 波段,是最佳的大气弱吸收窗口之一,波长约8.4mm,圆饼形天线直径约14 cm,波束宽度约4.2°,增益约32.5 dB。

图1 紧凑型Ka 波段降水雷达KPR(Pazmany,et al,2018)Fig.1 Compact Ka-band Precipitation Radar(Pazmany,et al,2018)

表2 KPR 主要技术参数(Pazmany,et al,2018)Table 2 Main technical parameters of KPR(Pazmany,et al,2018)
一般情况下,雷达采用上探测和下探测交替模式,以便探测飞行高度以上云层和以下云层的回波数据。向上探测时,上部天线工作;向下探测时,下部天线工作,两部天线性能一致。向上探测的时间大约为0.1 ms,向下探测时间也是0.1 ms,每0.1 s可以获得500 组探测数据。探测时,飞机的飞行速度大约为100 m/s,两组相邻发射脉冲对应的照射体积几乎不变,因而可以对回波信号进行累加处理,提高信噪比。
雷达发射的电磁波遇到云粒子时,会对雷达入射电磁波产生散射。雷达接收到单个云粒子的回波功率Pr为
式中,Pr是接收功率,Pt是发射功率,G是天线增益,Grec是 接收机增益,lr是接收机损耗,λ 是波长,σ是雷达截面,r是目标到反射器的距离。
实际上,KPR 探测到的是一群云粒子的后向散射能量,因此,式(1)反映的单目标需要扩展到体积目标,用雷达反射率 η(m2/m3)和雷达照射体积(V)的乘积代替单个云粒子的雷达截面(σ)
回波能量方程(1)变为
又如,利用钻孔抽芯法进行检测。钻孔抽芯法是利用钻孔机通过对桩基进行芯样钻取,分析芯样数据进行桩基质量检验的方法[3]。由于钻孔抽芯法不适用于大范围桩基质量检测,对此在本工程桩基质量检测中,在完成超声波质量检测后,针对存在疑问性的桩基应用钻孔抽芯进行二次检测,以保证桩基质量检测的准确性与科学性。
则云粒子群的雷达反射率 η为
在瑞利散射情况下,云粒子群的雷达反射率(η)和雷达反射率因子(Z)有如下关系
因此,云粒子群的雷达反射率因子的分贝数(ZdB),可根据下式计算得到
有了雷达常数、目标云的距离和回波功率,利用式(6)就可以得到云体的雷达反射率因子或回波强度,这是本研究所需要的核心数据。
由于飞机平台的空间和供电能力的限制,KPR天线和发射功率不大,其探测能力还是比较弱,为了实现对飞机上下云层的探测,远距离处采用线性调频发射和脉冲压缩处理技术,1 km 以上的距离压缩比为10,可获得约10 dB 的探测能力提升,使得1 km处最小可探测回波强度为由-8 dBz 提升到-18 dBz。近距离不进行脉冲压缩处理,以便获得更小的探测盲区,该雷达的探测盲区仅120 m,因此在飞行高度的上下各120 m 高度层,雷达不能探测云回波。除了这个240 m 云层外,雷达可以获得飞行路径的云回波垂直分布,垂直分辨率可以设定为7.5—75 m。雷达采用“脉冲对处理”技术,以脉冲回波信号的相关函数计算为基础,获得回波功率、径向速度和速度谱宽。
虽然强降雨对Ka 波段信号有一定的衰减,但对于降水性积层混合云,衰减有限,后期可通过衰减订正减小误差。
2.2 数据处理
选取的是2018—2020 年DMT 和KPR 观测获取的6 架次降水性积层混合云飞机探测资料,表3为这6 架次的飞行概况(北京时,下同)。由于两种仪器采样的时间分辨率不同,为了方便对比,将数据做1 s 平均,基于KPR 探测盲区的影响,航路上的云信息参数为雷达上下第一个可探测到的有效值的平均值。云的各种微物理参量由DMT 探测的粒子谱数据计算得到,粒子谱使用的是CDP 与CIP 的组合粒子谱:选择CDP 第2—24 档,探测粒子范围是3—38 μm,选择CIP 2—62 档,探测范围是37.5—1562.5 μm,其中CDP 和CIP 的第1 档数据由于受到信号干扰而被剔除。强降水时包含直径较大的雨滴,不但对KPR 信号造成显著衰减,而且不满足瑞利散射条件,KPR 测得的回波强度不准确,因此,只能使用CDP 和CIP 两个探头的数据,建立的经验公式也主要适用于弱降水的积层混合云。
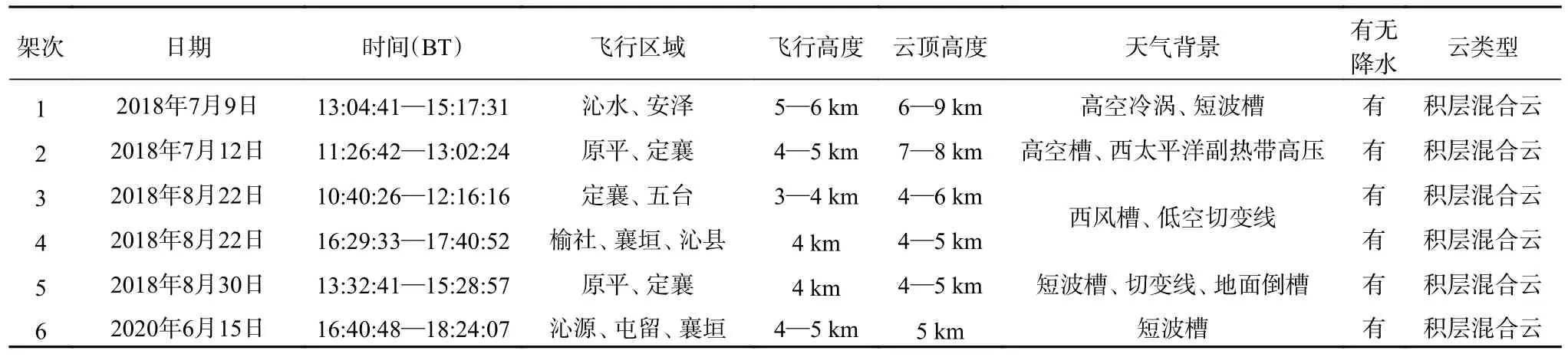
表3 飞行概况Table 3 Flight overview
为了保证数据的质量和研究的准确性,需要对数据进行一定的质量控制。首先是飞机出入云的标准,Yum 等(2002)以粒子总的数浓度Nc>1 cm-3为阈值确定云区;Hobbs(1991)认为FSSP 探头观测到云中粒径 >2 μm 粒子的数浓度(Nc)>10 cm-3为云区;Zong 等(2013)使用CAS 和CIP 的组合粒子谱来判断云区,以粒子总浓度不小于10 cm-3,液态水含量高于0.001 g/m3来判定云区。结合降水云系特征,文中规定:总的粒子数浓度(Nc)>10 cm-3或液态水含量(LWC)>10-3g/m3为云区,且至少有 5 个连续有效点。其次,因为冰晶是非球形的,它们的密度取决于颗粒的大小(Fox,et al,1997),在计算冰/液态水含量和含有冰晶的云的反射率时更加麻烦,因此本研究仅考虑暖云区的液态水含量(云温度高于0℃)。从图2 CIP 探测到的粒子图像就可清晰地看出,冷区中(图2a,2018 年7 月12 日12时39 分28 秒,温度为-0.28℃)存在一定数量的冰晶,形状不规则,暖区(图2b,2018 年7 月12 日12 时40 分50 秒,温度为0.46℃)则是球形粒子,由此说明暖区并无未融化的冰粒子存在。第三,根据KPR 雷达探测的回波数据分布情况,分析得出-25 dBz 是KPR 的探测阈值,因此,对于-25 dBz 以下的回波数据点不进行处理。最后,为了保证样本的准确,还需要剔除飞机通过云层边界或者起降时的数据。

图2 (a)2018 年7 月12 日12 时39 分28 秒的CIP 粒子图像,温度为-0.28℃,代表冷区;(b)2018 年7 月12 日12 时40 分50 秒的CIP 粒子图像,温度为0.46℃,代表暖区Fig.2 (a)CIP particle image at 12:39:28 12 BT July 2018 with the temperature of -0.28℃,representing the cold region,and(b)CIP particle image at 12:40:50 12 BT July 2018 with the temperature of 0.46℃,representing the warm region
3 KPR 探测能力检验
图3 反映出了两种仪器的反射率因子差别,Zobs的探测范围较ZKPR的范围略大一些。结合Y=X线可以看出反射率因子在大于-10 dBz 时散点均匀地分布在Y=X线两侧,且越靠近Y=X线样本密度越大,在小于-10 dBz 时大部分样本点位于Y=X线上方,表明在反射率较小时KPR 比观测值偏大,这是因为云中粒子分布极不均匀,当云中既有大粒子又有小粒子时,由于KPR 的采样体积大,其反射率的结果较为平缓,而CDP 和CIP 的采样体积很小,其反射率值变化波动比较大。图3 中样本点应该是均匀分布在Y=X线的上下两侧,但是,KPR 对小云粒子探测不敏感,对于只含有小粒子的云,KPR探测不到云粒子回波,返回的是无效的信号,而CDP 的最小测量量程是2 μm,可以捕捉到大量的小云滴,在统计时,由于对KPR 是无效信号,这些粒子谱计算的反射率因子较低的云样本将不会计入统计,使密度分布图上大部分样本点位于Y=X线上方。

图3 使用组合粒子谱计算的反射率因子与KPR 探测的反射率因子的分布密度(不同颜色代表落入每个格点中的样本密度)Fig.3 Density plot of reflectivity factors obtained from airborne CDP-CIP measurements and KPR measurements(different colors represent the number-density of samples)
图4 中蓝色圆圈表示每个Zobs所对应的ZKPR的平均值,上、下横线代表这组ZKPR的标准差,可以看出反射率在-10—30 dBz 时,Zobs的值基本落在ZKPR的误差范围内,从平均绝对误差(MAE)来看,在Zobs的值较小或较大时两者偏差较大,在20 dBz附近时偏差最小,-10—30 dBz 偏差相对较小。综合以上分析,对于发展较弱、反射率较小的云系,KPR 的探测结果会略微偏大,而对于发展旺盛、反射率较大的云系,一方面是由于KPR 会存在一定的衰减(云粒子衰减和气体衰减),使得KPR 探测结果偏小,还由于云中大粒子的米散射,KPR 测得的是等效反射率因子Ze,比瑞利散射下的雷达反射率因子弱一些。-10—30 dBz 范围内KPR 的探测结果与观测结果较为接近。
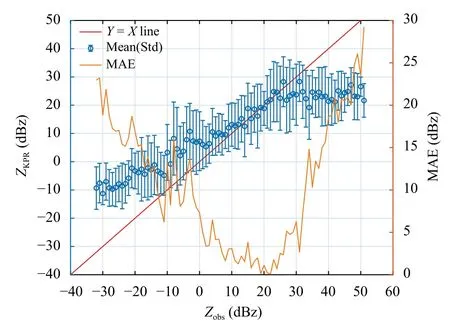
图4 利用飞机观测云粒子谱计算的反射率因子与KPR 测量的反射率因子偏差(蓝色圆圈表示每1 个Zobs 所对应的一组ZKPR 的平均值,上、下横线代表这组ZKPR 的标准差(Std),橙色线为两个反射率的平均绝对误差(MAE),红线代表Y=X 线)Fig.4 Difference between the reflectivity factor dBz obtained from the particle size spectrum of CDP-CIP observations and KPR measurements(blue circles indicate the mean value of a set of ZKPR corresponding to each Zobs,the upper and lower bars represent the standard deviation(Std)of this set of ZKPR,the orange line is the mean absolute error(MAE)of the reflectivity-pairs,and the red line represents the Y=X line)
当然,机载云粒子谱仪器的观测也存在误差,例如在合并粒子谱时,CDP 和CIP 在37.5—38 μm 有重合,假设粒径为37.8 μm 的粒子数浓度为0.1 cm-3,那么它将产生-35 dBz 的影响。此外,由于CDP 和CIP 采样体积小,在分布不均匀的积层混合云中,相邻时刻可能会得到粒子分布特征差异很大的采样结果,例如在2018 年6 月19 日16 时54 分00 至03秒的4 s 内,粒子谱计算的反射率因子分别为11.67、-0.13、4.15、12.07 dBz,从它们的粒子谱分布来看,4 个时刻粒子主要分布在75—700 μm,谱分布不连续,结合KPR 的反射率,基本稳定在10—13 dBz,但是Zobs的差距却高达12 dBz,这正是云的分布不均匀和CDP、CIP 测量代表性不足的结果。这种误差可以通过滑动平均等处理而降低,但是误差本身是存在的。
因此,在误差允许的范围内,两种完全独立、探测原理完全不同的仪器,若是它们得到的反射率因子有较好的一致性,那么可以认为这两个仪器的探测结果能够较为准确地反映云的微物理特性。
4 Z-LWC 经验公式建立
Atlas(1954)提出雷达反射率(Z)与液态水含量(LWC)存在简单的指数关系:Z=a×LWCb,但利用观测数据进行验证表明,Atlas 经验关系式存在很大的误差。这主要是受到云内大量尺度不同的云滴粒子的影响,观测的降水云有很宽的粒子谱,不仅有几微米的云滴粒子,还有几百微米的毛毛雨粒子,甚至上千微米的雨滴,这些宽谱粒子情况与云的形态、云中微物理特征和动力过程有很大的关系(Comstock,et al,2005)。
当不考虑云类型以及云中粒子分布时,Z与LWC 并不存在一个固定的指数关系,或者说,在当前的文献中,找不到适用于所有云粒子谱情况的Z-LWC 关系。但是,当限定了粒子的尺度范围时,Z和LWC 的相关就表现出来了。Sauvageot 等(1987)对反射率小于-10 dBz、最大粒径小于200 μm 的云粒子进行拟合,得到了适用于非降水或有非常弱降水的层积云的经验公式;Fox 等(1997)的经验公式则是根据FSSP(探测量程为 2—47 μm)探测的粒子谱数据,总结出适用于反射率小于-17.8 dBz 的非降水海洋性层积云的Z-LWC 关系;Baedi 等(2000)研究的是有效粒径小于20 μm 的层积云;对于降小雨或毛毛雨滴的降水层状云,Krasnov 等(2005)得到了相应的Z-LWC 关系。结合表1,不难发现,不同类型的云,对应着不同的Z-LWC 关系,这是因为云中水成物的分布极其复杂,粒径跨度非常大,有小到微米量级的云滴粒子,也有大到毫米量级的雨滴粒子,而Z-LWC 经验公式中参数a、b很大程度上与云类型和粒子谱特征有关(Sauvageot,et al,1987;Khain,et al,2008)。降水性积层混合云中不仅含有微米级的云粒子和几百到上千微米的雨滴,在已有经验公式都不适用的情况下,需要根据飞机实测的Z值和雨滴谱数据,拟合出适用于降水性积层混合云的Z-LWC 关系,以便反演飞行路径上的LWC 廓线。
对于降水云和非降水云,通常用到反射率因子和粒径两种参量来判别,Sauvageot 等(1987)提出粒径200 μm、反射率-15 dBz 是降水云和非降水云的界限,Baedi 等(2000)研究发现反射率低于 -20 dBz的层积云中不含毛毛雨滴,Frisch 等(1995)将雷达反射率值大于-17 dBz 作为判断毛毛雨滴存在的标准,Kogan 等(2005)选择 -17 dBz 为阈值来区分非降水云和降水云。基于以上研究,文中选取有效粒径200 μm、反射率因子 -15 dBz 作为区分降水云和非降水云的阈值,关注反射率因子大于-15 dBz、有效粒径大于200 μm 的降水云。图5 是Zobs与lg(LWC)的散点分布。可以看出Zobs与 lg(LWC)存在一定的线性关系,相关较好,决定系数(R2)为0.958,均方根误差(RMSE)为0.203 g/m3,拟合公式为
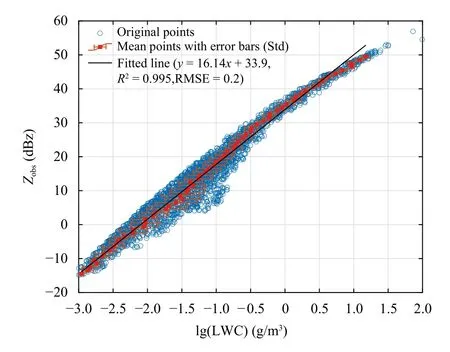
图5 Zobs 与 lg(LWC)的散点(红色方点为平均值,以标准差为误差条,黑色粗线是拟合线)Fig.5 Scatter plot of Zobs versus lg(LWC)(red squares denote mean values,standard deviations are shown as error bars,the thick black line is the fitted relationship)
换算成Z-LWC 经验公式
为了更进一步提高拟合效果,对Zobs进行分档,每1 dBz 为一档,其对应的lg(LWC)取平均,将Zobs每档的中值和lg(LWC)的平均值进行拟合,最终得到Zobs和 lg(LWC)的经验公式(图5 中黑线)
换算成Z-LWC 经验公式,即
R2达0.995,RMSE 减小到0.2 g/m3。
与以往的Z-LWC 关系的对比发现,指数b的值都比较接近,但本研究的系数a明显较大,这种差异主要还是与云类型及云中不同的粒子谱分布有很大关系。Krasnov 等(2005)的研究中,云中有一定量的小雨或毛毛雨,其系数a比其他研究大,随着云中含有的粒子尺度的增大,系数a也随之增大,这与 De Wit(2000)的结论相似,因此对于含有大量毛毛雨滴或小雨滴的降水性积层混合云,系数a较大是合理的。
5 LWC 反演
建立雷达反射率因子与液态水含量的经验公式后,利用雷达探测的反射率就可以反演得到云层的LWC。图6 给出 2018 年6 月19 日16 时52 分00秒至59 分00 秒使用多个经验公式反演航线上液态水含量的时间序列,显而易见,本研究的经验公式反演的结果与实测 LWC 吻合较好,并且在大多数情况下与观测结果最为接近。对于发展较弱的非降水云(例如16 时52 分40 秒之前),云中主要以小粒子为主,粒子数浓度非常大,液态水含量也很丰沛,使用本文的经验公式(式(10))会使反演结果偏小,因此对于非降水云,还是使用已有的经验公式(表1)更为合理。

图6 2018 年6 月19 日16 时52 分00 秒—59 分00 秒多个经验公式反演的飞行航线上液态水含量的时间序列(黑色实线表示飞机观测的液态水含量,红色实线是使用本研究结果反演的液态水含量,其他虚线代表的是用表1 中的经验公式的反演结果)Fig.6 Time series of liquid water content retrievals from different empirical Z-LWC relationships along the flight route during 16:52:00—16:59:00 BT 19 June 2018(solid black line indicates the liquid water content observed by the CDPCIP,solid red line is the retrieved LWC using our own Z-LWC relationship,and the other dashed lines represent the retrieved results using previous empirical formulas in Table 1)
图7 分别是2018 年6 月19 日16 时52 分00秒至59 分00 秒KPR 观测的反射率因子和反演的LWC 剖面,图7b 可以清晰地展示云内液态水含量的整体分布情况,基本上在10-3g/m3到 10-1g/m3量级上变化,在积层混合云内对流核区域液态水含量相对较大,最大值达 0.513 g/m3。在垂直方向上,LWC 由云底到云顶先增大后减小,大值出现在云的中部,小值出现在云顶附近。此外,在垂直方向上LWC 还出现多峰结构,比如16 时54 分00 秒前后云的反射率因子较大,云中含有一些大尺度雨滴粒子,并降落到地面形成有效降水,同时配合云体中、上部周围的上升气流,使云系继续发展,导致液态水含量在垂直方向上呈现多峰结构。
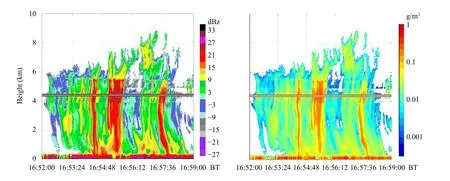
图7 2018 年6 月19 日16 时52 分00 秒—59 分00 秒(a)KPR 观测的雷达反射率因子垂直剖面和(b)KPR 反演的LWC 随时间的垂直剖面(0 高度代表地面,粗线是飞行航线高度,约4.3 km)Fig.7 (a)KPR Radar reflectivity factor profile on 19 June 2018 from 16:52:00 BT to 16:59:00 BT,(b)LWC profile retrieved from KPR measurements with time(zero altitude represents the ground level,thick line is the flight path altitude,which is about 4.3 km AGL)
6 结论与讨论
云参数是影响降水和大气辐射过程的重要因子,随着毫米波雷达的发展,可以利用遥感探测手段对云中液态水含量进行反演研究,这在云特性研究以及人工影响天气作业效果检验中具有非常重要的意义。利用2018—2020 年飞机观测资料,检验中国首部Ka 波段机载云雷达的探测能力,并建立适用于降水性积层混合云的Z-LWC 经验公式,研究结果如下:
(1)将KPR 探测的反射率因子与飞机观测粒子谱计算得到的反射率因子进行对比,发现两者有较好的一致性,相关系数达到了0.77,平均偏差2.91 dBz。两种仪器在采样区域、位置以及采样体积上的差异使两个反射率因子存在一定的偏差,但是在误差允许的范围内,两种完全独立、探测原理完全不同的仪器,它们得到的反射率因子有较好的一致性,说明这两个仪器的探测结果都能较为准确地反映云的微物理特性,该机载雷达和云滴谱仪探测数据可靠。
(2)在对反射率因子分档的基础上,首次建立了适用于降水性积层混合云的Z-LWC 经验关系,Z=2454.71×LWC1.614,决定系数达0.995,RMSE 为0.2 g/m3,丰富了Z-LWC 关系。
(3)利用本研究的Z-LWC 关系。根据KPR 探测的反射率因子廓线,反演得到了云层LWC 的垂直分布,对研究云的宏微观特征及云内降水机制等都有重要的意义。
随着机载毫米波雷达的应用和试验样本数据的增大,将更详细地划分云类型,针对不同特征的云系拟合得到各自的经验公式,进一步提高反演的准确率。随着后续探测试验的继续开展,冷云的冰水含量的反演,KPR 的衰减订正等将会在下一步工作中进行。