考虑车辆悬架的加速度与国际平整度指数的理论关系研究
2023-11-10吕文江张震
吕文江,张震
(1.陕西交通控股集团公司,陕西 西安 710075;2.长安大学 公路学院,陕西 西安 710064)
0 引言
路面平整度被定义为道路表面相较于理想平面的竖向偏差,是影响路面行驶质量的关键因素,也是道路交工验收和运营养护控制的关键性指标[1-2]。另外,路面平整度作为车辆系统的激励输入,在车辆行驶过程中引起振动,影响车辆的平顺性、操纵稳定性、燃油经济性、运输效率以及造成车辆部件的磨损和疲劳损伤。因此,准确和精确的测量与表征是道路平整度必不可少的[3-4]。
一般来说,表征路面平整度的指标分为两类:断面轮廓类指标和振动响应类指标。断面轮廓类指标如功率密度谱(PSD)[5]、道路高程均方根(ERMSE)[6]、加权纵断面(WLP)[7]以及各种类型的竖向偏差,在世界各国均有广泛应用。振动响应类指标,包括行驶质量指数(IQRI)、国际平整度指数(IIRI)和断面指数(IPI)[5],通常可以方便和高效地获取,因而应用范围更广。在众多平整度指标中,IIRI因其可转换性、相关性、稳定性和有效性而成为世界上应用最为普遍的平整度评价指标。目前,已经在道路验收、道路管理、路面平整度评价、IIRI预测模型等方面得到了广泛的应用。近年来,IIRI已扩展到汽车领域,IIRI与汽车振动响应以及平顺性的相关性成为研究热点。根据乘客乘坐舒适度或不舒适度限值,研究了相应的路面平整度和车速限值,为路面养护和运输管理提供了有益的指导[8-9]。
Sayers 等[10-11]研究了基于状态空间的计算程序以及Fortran 和Basic 程序代码,为IIRI的计算和应用奠定了理论基础;Buttlar 等[12]利用固定传感器装置采集车辆加速度数据,并将其以ASC Ⅱ文本格式存储。借助Matlab 将所获取的行车加速度数据二重积分计算路表纵断面轮廓,从而确定路面平整度指标。通过对比发现,传感器采集数据的频率越高,计算得到的路面轮廓值越精确[12-15];Kang 等[16]利用安装在车身的线性位移转换器和加速度计收集车辆悬架的竖向加速度,通过离散卡尔曼滤波法(DKF)过滤离散的原始加速度数据中存在的车辆振动噪声,并实现系统加速度数据最优估计,最后利用二重积分计算出车身悬架位移和平整度指标,实现路面平整度的评价;González 等[17]研究了基于1/2 车辆模型的输入输出传递函数关系式,建立路表功率谱密度(PSD)和车辆加速度之间的估计关系,进而通过得到的路面功率谱密度的估计值来评价路面平整度情况;王惠勇等[18]将所收集的行驶车辆加速度数据利用滑动平均滤波法有效过滤随机噪声数据,以保持数据阶跃响应的特征,之后通过BP 神经网络法构建不同行车速度下的车辆竖向垂直响应与IIRI值的回归模型以实现对路面平整度指标的预测;Chen 等[19]则提出了基于加速度数据估算IIRI的黏弹性模型,研究在不需要车辆悬架参数的情况下,建立利用该模型估算的IIRI值与ProVAL 计算的IIRI之间的关系。然而,目前的平整度计算程序并未考虑车辆的悬架系统在平整度测试时对振动的抵消和缓冲作用,即在计算程序中未引入不同车辆的悬架参数等,而只是将车辆加速度数据二重积分,用车辆上悬架的竖向位移代替路表轮廓高程。此外,相关研究还有通过试验路实测的方式建立车辆竖向加速度与标准测试程序确定的IIRI间的回归关系,但这属于经验公式,测试结果与现场试验条件、不同时期试验车辆振动特性等因素密切相关。
对此,针对通过理论法利用车辆加速度数据计算确定路面平整度指标IIRI所存在的问题,本文研究提出一种考虑试验车辆悬架参数的路面平整度指标IIRI确定方法。
1 车辆振动物理参数的识别
1.1 车辆模态参数的推导
1/4 车辆模型在受到竖向瞬时冲击后,车轮对冲击的响应为自由振动,如图1 所示。基于拉格朗日方程或牛顿定律建立车辆动力学微分方程如式(1)、(2)所示:
式中:zs为簧上质量的竖向绝对位移;zu为簧下质量的竖向绝对位移;相应地,żu、z̈u和żs、z̈s分别为相应的竖向速度和竖向加速度;δ( 0 )为路面不平整对车轮的瞬时冲击荷载。
将上述方程改写成矩阵微分方程的形式,如式(3)所示:
式中:{f(t)}为冲击荷载向量;[M]为车辆模型的质量矩阵;[C]为车辆模型的阻尼矩阵;[K]为车辆模型的 刚度矩阵;z̈(t)、ż(t)与z(t)分别为该车辆模型受到路面不平整激励的振动加速度响应向量、速度响应向量与位移响应向量。
本文中,车辆悬架的物理参数与模态参数间理论关系是利用复模态理论确定得出的。引入方程[M] {ż} -[M] {ż} =0,则式(3)可以写为:
考虑到作用在车辆模型瞬时荷载δ(0)激励后消失,此后车辆模型作自由振动,因而分析时可取{f′ }=0。方程即为:
基于一阶齐次常微分方程的解,令:
代入到上述方程,则有:
因矩阵[B]为正定的,即为可逆矩阵,有:
式中:
[R] =-[A]-1[B] =,[R] 为非实对称,相应的特征值和特征向量的矩阵如式(10)、(11)所示:
设:{z} ={ψ} est,则{ż} =s{ψ} est,且:
需要注意的是,[Ψ] 为{z} 的复模态振型矩阵;N为复模态的阶数,为车辆模型自由度;sk、{ϕk}、{ψk}分别为复数或复数构成的向量;sk*、{ϕk*}和{ψk*}为其相应共轭量。
由式(8)可得:
鉴于各特征向量{ϕi}间有加权正交性,有:
用矩阵表征式(15)和(16)的正交性,即:
结合式(17),并在式(14)两边同乘[Φ]T,则:
考虑到[Φ]的特征向量{ϕi}间具有加权正交性,可当作模态向量空间的基向量,将物理坐标转换为模态坐标。
为式(5)解耦,令:
则:
将式(21)代入式(5)中,则:
根据上式和式(15)、(16),则:
设sk=-bk/ak,s=jw,代入式(23),可得:
基于上式并结合式(21),则:
结合式(12),则{Z} 可以表征为:
由此,位移响应的复模态频响函数矩阵为:
在p点施加激励在q点产生响应加速度复模态频响函数为:
令:Apqk=ψpk ψqk/ak,Apqk*=ψpk*ψqk*/ak,则 式(29)可写为:
根据多自由度的有阻尼自由振动理论可得式(31),则1/4 车辆模型的k阶复模态固有频率wk和阻尼比ξk(k=1,2)为:
1.2 基于试验数据的车辆物理参数求解
1.2.1 车辆前轮跌落试验
测试前,试验车辆的前轮停在固定规格的两块木块(40 cm×40 cm×10 cm)上,且两位体重相当的成人乘坐在车辆前排,加速度采集装置布置在车辆前轮上;试验开始时,首先打开加速度采集装置的开关开始收集数据,并由一名试验人员从车辆后部向前推,使车辆从木块上自由跌落直至车辆振动消失;最后,关闭采集装置,整理加速度车辆测试数据,试验过程如图2 所示。

图2 车轮跌落试验
1.2.2 车辆模型参数的确定
通过离散时间傅里叶变换,将采集的车辆自由振动衰减信号由时域信号转换为频域信号,从而良好保存信号的频域特征信息。
将 式(30)中 的 复 数Apqk记 为Ak,并 写 为Ak=U+jVk的形式,则式(34)为实测加速度响应在频域中的复数值:
利用最小二乘迭代法,建立测试数据的非线性回归模型,通过对回归模型赋初值并多次修正,使回归模型的计算结果不断接近试验值而实现最佳的拟合。需要指出,U1,V1,s1,s1*,U2,V2,s2,s2*为上述非线性模型的回归系数。
最后,利用Matlab 的遗传算法工具箱计算实际车辆模型物理参数,相关参数设置如下:100 的样本组数、500 代进化次数、选择均匀分布配对,启发式算法交叉方式,0.95 的交叉概率,0.01 的变异概率,其余为默认状态[20]。
2 基于理论法的加速度与IIRI 的关系研究
2.1 车辆模型方程的推导
在路面激励作用下,1/4 实际车辆模型受迫振动方程如式(35)、(36):
式中变量含义同式(1)、(2),y为轮底部相应的路面高程变化函数。
整理式(35)、(36),并写为一阶矩阵微分方程形式,即:
式中:k1=kt/ms,k2=ks/ms,u=mu/ms,c=cs/ms。
将矩阵方程等号两边同时求导,即为:
其中:
基于非齐次矩阵微分方程的通解[21]:
式中:τ为设定的积分变量。
本文取时间间隔为t-t0=dt=0.01 s,并由y′(t)来代替积分区间[t0,t]内任意时刻的y′(τ),可得:
则:
令:
ST==eA(t-t0),称 为 传 递 矩阵;PR==A-1[ST-I]⋅B,称为系数矩阵,则式(41)写为式(42):
因此,车辆模型的状态变量的递推方程为:
式中:Zs′、Zs′、Zu′、Zu′为下一数据采样时刻的状态向量;zs′、zs′′、zu′、zu′′为当前数据采集时刻的状态变量;y′为下一个数据采集时刻轮底路表坡度;sij、pi为过渡矩阵中相关参数;传递矩阵ST=eA(t-t0)=eAdt,dt为振动数据采样时间间隔,取dt=0.01 s。
2.2 路表轮廓高程数据的确定
根据前文推导的车辆模型动力学方程和所收集行驶车辆的竖向加速度数据,路表轮廓高程数据可以按照如下步骤计算:
(1)由于车辆行驶的加速度数据采集装置安装在试验车辆的前轮上悬架位置,因而可以认为该装置所采集的加速度数据为簧上质量的竖向加速度zs′′,如图3 所示,即各采样时刻zs′′均为已知。

图3 智能手机采集数据位置
(2)由于1/4 车辆模型坐标系是在第1 个采集时刻的路表纵断面位置和簧上、簧下质量处建立的,因而zs( 1 )=zu( 1 )=0,y=0。第1 个行车数据采样时刻的簧上质量和簧下质量的状态变量zs′和zu′′取0,zs′和zu′取数据采集起始点至行驶前方11 m 处的平均路面坡度,一般取车辆0.5 s 在80 km/h 车速下行驶距离[21-22],即:
式中:s为起始行驶位置后11 m 处的路表高程;y(1)为第1 个行车数据采集时刻的高程。
(3)前面分析的任意采集时刻的簧上质量状态变量zs′均已知,且第1 个采集时刻zs′、zs′、zu′和zu′均可 算 得。将 第1 个 采 集 时 刻 的zs′、zs′′、zu′、zu′′和 第2个采集时刻的Zs′代入式(44)即可确定第2 个时刻路表坡度y′。
(4)再 将 第1 个 时 刻 的zs′、zs′′、zu′、zu′′和 所 计 算的第2 时刻的y′代入式(43)、(45)和(46)中,即可得到第2 时刻的Zs′、Zu′和Zu′′。
(5)重复上述过程,逐步递推计算即可得到任意采样时刻的路表坡度y′。
(6)利用任意时刻的路表坡度y′和第1 采集时刻的路表轮廓高程y(1)=0 并结合式(49),即可逐步计算任意采样时刻轮底路表高程。
式中:y(i+1 )为下一行车数据采集时刻路表高程;y(i)为前一采集时刻的路表高程;dx为试验车辆在时间间隔dt内行驶的距离,本研究中车速控制在80 km/h,则dx=0.222 m。
2.3 路面平整度指标IIRI的计算
为标准化平整度指标IIRI的计算,取k1=653 s-2,k2=63.3 s-2,u=0.15,c=6.00 s-1作 为 车 辆 模 型 参数,从而根据式(38)确定矩阵A′和B′并最终可以计算1/4 标准车辆模型的ST′和PR′,即:
基于所确定的矩阵ST′和PR′,可确定1/4 标准车辆模型的递推方程,即为:
根据式(52)~(55),并结合上节计算确定的各点路表坡度y′及由式(47)和(48)所计算的第1 采集时刻的状态变量zs′、zs′、zu′和zu′′,可以计算第2 采集时刻的状态变量Zs′、Zs′、Zu′、Zu′;然后将第2 采集时刻的状态变量作为下一采集时刻的初始状态变量,递推计算即可确定任意时刻的状态变量;任意数据采样时刻车辆簧上、簧下质量的位移由式(56)和(57)计算确定;最后根据式(58)计算路面平整度指标IIRI。
式中:n为第n个行车数据采集时刻。
3 试验结果准确性检验
3.1 验证分析方法
IIRI理论计算方法的验证过程如下:
(1)选择陕西省西安市周边的西潼高速公路右幅外侧行车道(桩号K996+000~K1027+000)、西禹高速公路左右幅外侧行车道(桩号K1020+000~K1055+000)作为测试试验路段。测试车辆在最右边的行驶车道以80 km/h 的稳定速度行驶。
(2)为了验证本文IIRI理论计算方法的准确性,将加速度采集装置如加速度计安装固定完成后(图4),在测试试验路段相同桩号范围内分别采集3 次数据。

图4 行车加速度数据采集
(3)由于道路多功能检测车内置的纵断面测量系统,是通过激光传感器和加速度计对路表纵断面高程数据进行采集,然后利用其数据预处理系统计算IIRI值,且能在变速情况下以1 mm 的数据采集间距准确地检测路面平整度信息。因而本研究将其视为真实断面平整度,并以此检测结果作为对比对象。
(4)利用Matlab 对上述推导计算过程进行编程,从而由所采集的对应桩号区间内竖向加速度数据计算得出路表轮廓高程和路面平整度指标IIRI。
(5)将本文所用的理论法得出的IIRI和道路检测车测量的IIRI结果对比,从而验证本研究的考虑车辆悬架的国际平整度指数理论计算方法的准确性。
3.2 试验结果验证实施
通过前述的车辆前轮跌落试验并利用Matlab 编程计算的方式,确定本研究所采用试验车辆的车辆模型振动物理参数如表1 所示。
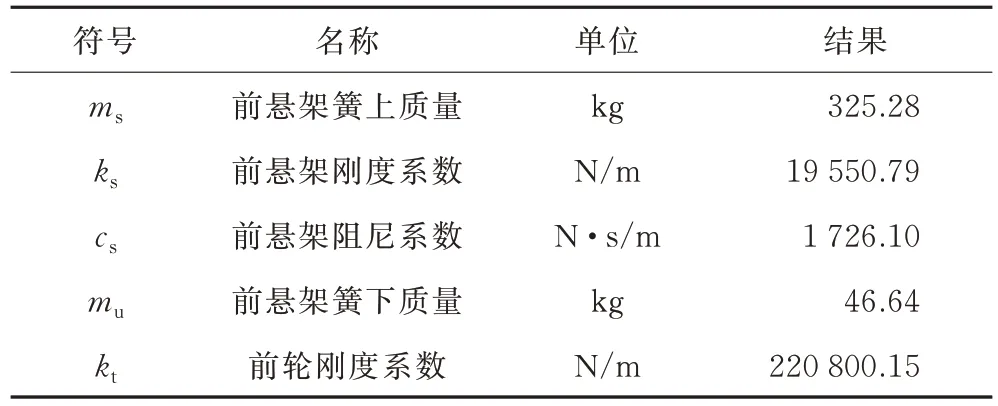
表1 试验车辆的振动物理参数
识别出该试验车辆的1/4 实际车辆模型物理参数后,根据传递矩阵法求解出该车辆模型的变量传递矩阵和系数矩阵。按照2.2 和2.3 节迭代过程进行路表轮廓高程的反算以及基于纵断面轮廓高程的IIRI值求解。本研究中,各试验路段内每100 km 桩号的IIRI值计算结果与道路多功能检测车的IIRI值测量数据对比如图5 和表2 所示。

表2 理论法与检测车确定的IIRI值之间相对误差
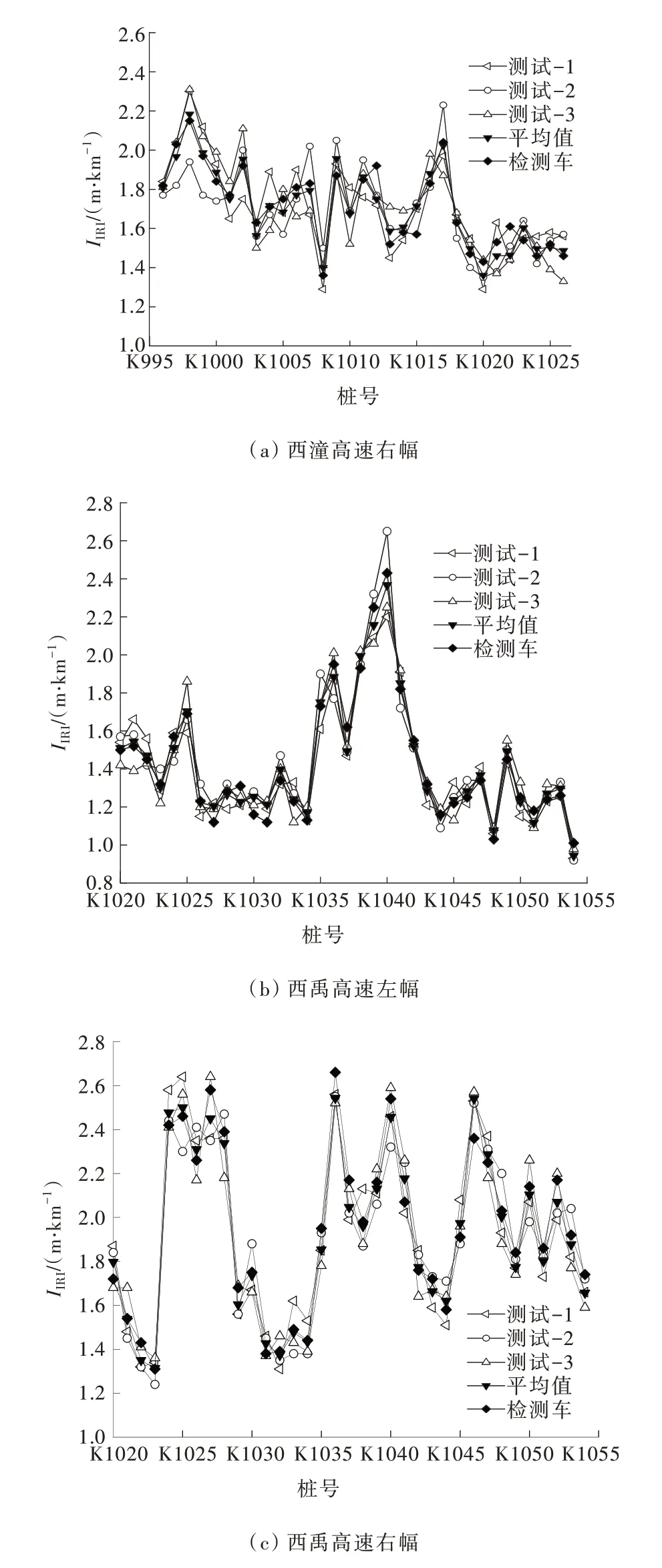
图5 理论法与检测车确定的IIRI值对比
结合图5 和表2 可知:以道路多功能检测车确定的路面平整度指标IIRI为标准测试结果,西潼高速右幅路3 组测试结果的最大相对误差为-10.56%,其测试结果平均值的最大相对误差为9.12%;西禹高速左幅路3 组测试结果的最大相对误差为10.03%,其测试结果平均值的最大相对误差为8.32%;西禹高速右幅路3 组测试结果的最大相对误差为9.17%,其测试结果平均值的最大相对误差为7.62%。根据上述验证结果,本理论计算方法的IIRI值与参考测量值基本吻合,相对误差在11%以内,说明本研究中基于车辆加速度数据的IIRI理论计算法具有较高的准确性。
4 结论
(1)首先基于复模态理论确定了车辆振动物理参数与模态参数之间的理论关系,然后利用最小二乘迭代频域识别法求解车辆模态参数,并最终基于遗传算法借助Matlab 实现1/4 实际车辆模型振动物理参数的反算。
(2)根据矩阵传递法通过推导车辆模型受迫振动响应时的动力学方程,反算路表轮廓高程并计算路面平整度指标IIRI。
(3)通过3 个试验路段测试,结果表明本文理论计算方法IIRI值与参考测量值基本吻合,相对误差在11%以内,证明基于行车加速度的IIRI理论计算法具有较高的准确性。
