气动软体执行器设计、制造与控制研究
2023-11-06马晓杰张解语崔方圆董亚航王金超
马晓杰,张解语,崔方圆,董亚航,王金超
(1.河南工学院 机械工程学院,河南 新乡 453003;2.河南省机电装备数字化设计与制造工程技术研究中心,河南 新乡 453003)
0 引言
工业装配中,人类手指在触觉、视觉系统和工具的协助下,可以完成很多复杂且易损的装配任务,此类灵活、精确的工作是普通工业机械手难以替代的。然而人类手指持续工作中会面临疲劳、受伤等问题,因此,若以人类手指为参考,设计一种气动软体执行器,融合人类手指的灵活性和工业机械手效率高的优点,就可以提高装配质量和效率,降低零件损坏和人类受伤的风险。
软体执行器与传统的刚性执行器不同,其结构具有高度冗余的连续体变形和自由度[1],在制造、分析和控制方面尚缺乏成熟的理论和方法。本文针对工业领域的抓取需求,设计了一种气动软体执行器,通过灵活的配置组成手爪,可以完成不同的抓取和装配任务。同时,也研究了该气动软体执行器的制造、分析和控制方法。
1 气动软体执行器设计
为了满足工业场景中多样的抓取需求,设计的气动软体执行器如图1所示。其变形部分长度为100mm。气动软体执行器端部在给定压力下向一侧偏移,实现对物料的抓取。一侧设有多个凸起的气室,当气室内部给定压力时,这些气室会产生比另一侧更大的膨胀变形,从而驱动该气动软体执行器向气室的相对一侧弯曲。当气压消失,气动软体执行器将随材料的驱动回到原始状态。
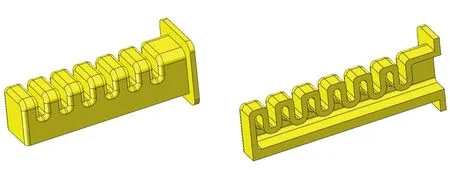
图1 气动软体执行器结构
2 气动软体执行器仿真
针对气动软体执行器,可通过运动学建模和动力学建模对其进行解析分析。运动学建模方法有分段常曲率模型和非恒定曲率模型。动力学建模方法包括凯恩法、牛顿-欧拉法和拉格朗日法[2]。然而,对于结构复杂,由复合材料制成的气动软体执行器,有限元模拟具有更广泛的适应性。
为了更具体地研究该气动软体执行器的运动学特性,本文使用了Abaqus软件对图1所示的气动软体执行器样本进行了相关分析。该样本由EcoFlex 00-30硅胶制成,该材料被认为是一种各向同性、不可压缩的超弹性材料。仿真过程中,可通过简化的YEOH(Young-Eyring-Oliver-Hoff)三阶多项式模型来描述其性能[3]:

(1)

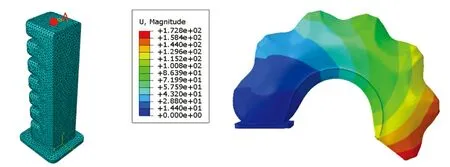
(a)有限元网格划分 (b)变形位移结果 图2 针对气动软体执行器的有限元仿真结果
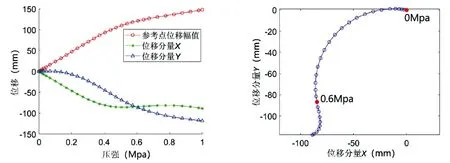
(a)参考点压强-位移分量曲线 (b)参考点位移变化曲线图3 参考点位移
由图3可知,在该气动软体执行器中,当气压小于0.6 MPa时,其运动轨迹接近于曲率相等的圆弧,而当气压大于0.6 MPa时,其运动轨迹具有较强的不确定性。
3 气动软体执行器制造工艺
EcoFlex系列硅胶具有优秀的抗撕裂性能和超弹性力学性能。它由两种主要成分混合制备而成,本文简称这两种成分为A和B。这两种成分被充分混合后,可根据需要注入不同形状的模具,从而制备出各种不同形状的气动软体执行器。具体制备过程如下:
① 根据模型实体,使用熔融沉积工艺3D打印技术制作上、下型腔和型芯,然后将它们装配在气动软体执行器模具上,如图4所示。
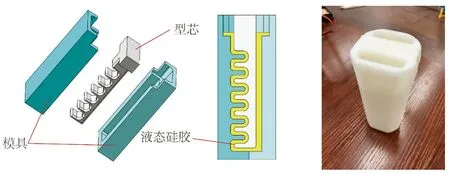
(a)硅胶一体成型浇筑工艺示意 (b)硅胶浇筑模具图4 硅胶一体浇筑成型工艺
② 将A、B组份EcoFlex00-30硅胶混合并充分搅拌10分钟后注入装配好的模具中,进行15分钟的真空去泡处理,随后静置6小时,等待硅胶完全凝固。
③ 缓慢拆解模具,抽出型芯,修整气动软体执行器端面,采用3D打印制造端部密封件,以固定其端部,得到气动软体执行器单元成品,如图5所示。
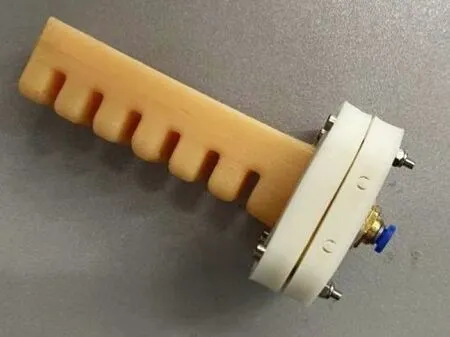
图5 气动软体执行器原理样机
4 原理样机实验
为了验证仿真的准确性,本文设计了如图6所示的实验平台。平台包括气压定量传递装置、光源和工业相机。气压定量传递装置包括气源、气体过滤器、比例阀以及控制板等元件,控制板可以接收来自上位机的信号并控制比例阀以输出相应的气压。光源和工业相机组成了一个结构化的光照系统,通过适当的标定信息,我们可以精确、实时地通过视觉测量气动软体执行器的变形。
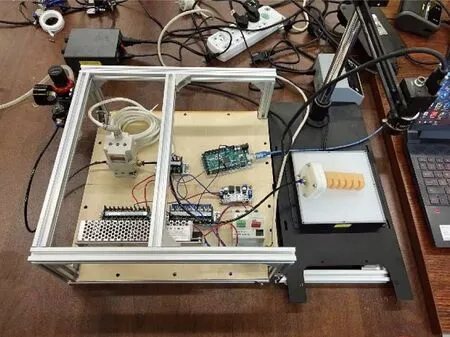
图6 气动软体执行器定量变形实验平台
基于该实验平台,得到了气动软体执行器末端参考点在不同压强条件下的变形情况。如图7所示,气动软体执行器的变形与仿真结果基本一致,即证明了通过控制气压可以使气动软体执行器产生不同的位移,从而满足不同的工作需求。
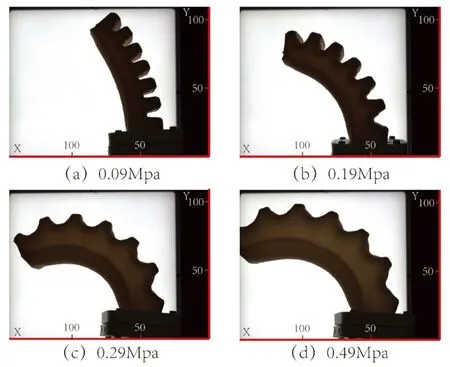
图7 不同气压下气动软体执行器的变形行为
以未变形时气动软体执行器右上端中点为参考点,通过图像处理提取其空间位置。对比实验和仿真不同气压下的相对位移(如表1所示),可知气动软体执行器在不同气压下的变形基本符合仿真预期。

表1 不同气压下实验与仿真的位移对照
5 结论
本文研究了一种用于抓取的气动软体执行器,研究了其仿真、制造和控制等关键问题。经过实验和仿真的对比,证明了通过有限元分析方法可以对气动软体执行器的变形行为进行仿真,并有助于指导设计。此外,基于3D打印的一体成型技术也可以制造出不同的气动软体执行器。