机载LiDAR在山区水库划界应用中的关键技术分析
2023-11-06于强,文彬
于 强,文 彬
(河南省水利勘测有限公司,河南 郑州 450003)
1 总体技术路线
针对山区水库地形条件复杂特点,利用无人机主被动遥感技术,获取测区高分辨率光学影像及激光点云数据,同时充分利用正射影像的丰富光谱信息和点云数据的高精度三维坐标信息,制作高精度DEM,基于DEM 和DOM 实现水库的管理范围与保护范围精确划定。总体技术路线如图1所示。
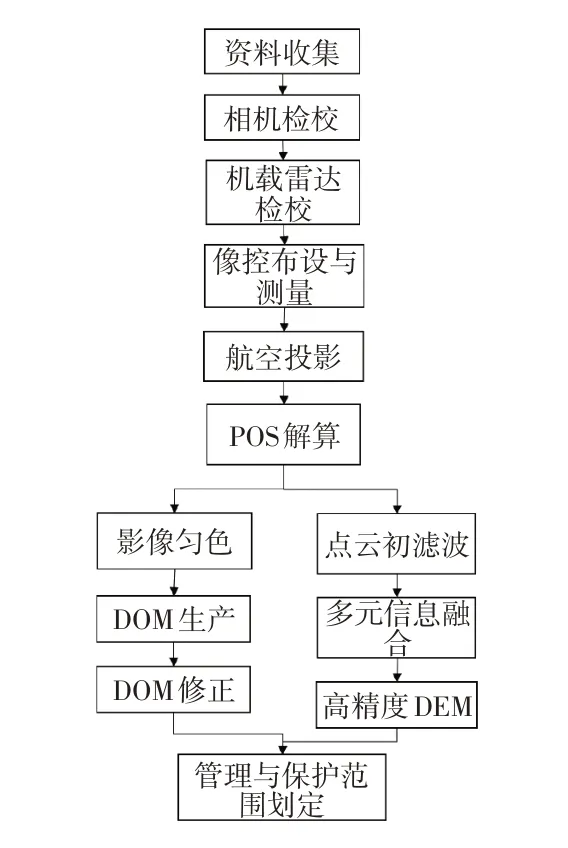
图1 机载LiDAR水库划界技术流程图
2 数据处理关键技术
2.1 仪器检校
2.1.1 相机检校
目前无人机遥感系统使用多数为非量测数码相机,非量测数码机的内方位元素和畸变系数未知,且不够稳定,不能直接进行像位的解析计算,因此在使用前需要对其进行严格的检校。所采用的相机几何成像模型和畸变校正模型如公式(1)所示:
2.1.2 LiDAR扫描仪检校
①读入检校场激光点云数据,并坐标转换。②选取各条带间的同名点,反复计算视准轴偏差值Roll、Pitch 和Heading,生成新LAS 文件并检查,满足精度后输出reg 格式检校文件。③利用视准轴检校修正后的参数重新计算激光点云LAS 文件。④利用实测的激光控制点计算Range Offset 值,进行距离检校。⑤距离检校完成后,进行Torsion 与Pitch error slope 检校。⑥整个测区,据实地检测高程点进行Elevation offset 修正。⑦计算最终激光点数据的绝对高程误差。
2.2 点云数据处理
①点云航线解算。利用无人机获取的地面基站GPS 和无人机载GPS数据融合差分解算,从而确定飞行轨迹,为后续航带的拼接、精度检查提供数据支持。②点云误差剔除。激光点云原始数据中存在异常点,即远大于飞行高度或测距值很小的异常数据,需要剔除。③激光点云的坐标解算。通过对无人机GPS轨迹数据、惯导姿态数据、激光测距数据,以及激光扫描镜的侧摆角度数据进行融合处理,计算出各激光点的X、Y、Z坐标数据。④坐标转换。POS定位系统所提供的位置为WGS-84坐标系,需要利用七参数转换至目标坐标系。⑤航带接边。利用无人机同步获取的高分辨率影像可以消除航带系统误差,提高航带相邻区域数据的精度,满足相邻航带地物间的连贯性。⑥数据滤波。原始点云数据中包含属于不同对象的点,需要通过滤波处理把地面点与非地面点区分出来。⑦点云内插。点云经滤波处理后,在激光雷达未获取到数据的位置,如建筑物底部,会出现点云缺失问题。因此,可以将对应位置地面点的高程作为该位置的高程,从而建立完整的数字高程模型。
2.3 正射影像修正
由于航空影像中高架桥等产生的投影差较大,按上述生成的DEM 仍存在较大误差,导致镶嵌后的正射影像中存在明显的几何结构错位问题,影响正射影像图精度。针对上述问题,采用了一种基于OESM(Orthoimage Elevation Synchronous Model)模型的高分辨率航空影像镶嵌修正方法,对制作出的DOM修正,使其符合成图精度要求。
OESM是利用数字高程模型、数字表面模型及正射影像对应的外方位元素,根据共线条件方程解算出与当前正射影像同步的可量测高程模型。利用OESM模型,根据测区内主要高大建筑物类型特点,标识出正射影像中高架桥等地物,检测一条完全避开高大建筑物的路径,完成正射影像的镶嵌修正。
2.4 高精度DEM制作
2.4.1 基于光谱特性的点云优化滤波方法
激光雷达点云包含精确的坐标信息,无人机影像包含丰富的纹理信息,将两者转换到同一坐标系下,可以实现点云与影像的快速融合。对于点云数据中的一点V,假设其平面坐标为(xV,yV),则点V在影像中对应的点坐标可以根据下式计算得到:
激光雷达点云密度较小,得到点云在影像中对应的平面位置后,可将该位置点的光谱信息赋予点云,使得点云数据既具有高精度的三维坐标信息,又包含地物的光谱特征信息,从而提高点云数据的可读性,确保后续点云分类准确性。
获取到包含RGB光谱信息的点云数据后,依据公式(3)计算该点的归一化植被指数nEGI,从而区分植被点与非植被点。点云经过归一化处理后,会增强植被点的信息,根据测区实际情况,经反复实验,设置nEGI 阈值为0.2,大于0.2 的为植被点,小于或等于0.2的则为地面点。
式(3)中:R、G、B分别表示每个点的对应波段光谱值。
2.4.2 高精度DEM构建基于光谱特性信息滤波得到的地面点云数据内插构建三角网,格网间距0.50 m,栅格化获取高精度数字高程模型。
3 水库划界应用
(1)水库管理范围与保护范围线划定。水库库区管理范围按照迁赔高程划定,保护范围按照校核洪水位高程划定,利用制作的DEM 提取管理范围高程线和保护范围高程线,划定出水库库区管理与保护范围。(2)工程管理区管理与保护范围线划定。管理范围以实际管理边界为准,实地采集划定,保护范围线不再单独划定。(3)特殊情况下的管理与保护范围线划定。①针对库区局部阔叶林茂密区域因激光点云数据量少导致精度不满足划界要求问题,采用GPS-RTK 配合全站仪进行高程值放样获取管理与保护范围线上各点的位置数据。②需按平面位置划定管理与保护范围的区域,按划界标准和原则确定。③实际管理范围大于按标准划定的管理范围时,按实际管理范围划定。对于已经划定的管理范围、保护范围大于上述标准的,不再进行变更;小于上述标准的,按以上标准重新划定。
4 结语
利用机载LiDAR 进行水库划界的方法,充分利用正射影像丰富的光谱信息和点云数据高精度三维坐标信息,制作高精度DEM,实现五个水库的管理范围与保护范围精确划定,发挥了低空无人机遥感技术高精度、高效率优势。