可进行γ 剂量率测量的无人采样船设计
2023-11-05吕映赋宋世彬朱小铰周俊宇谢林利马苛宁
吕映赋,宋世彬,朱小铰,周俊宇,谢林利,马苛宁
(1.四川省辐射环境管理监测中心站,成都 611139;2.四川省辐射环境评价治理有限责任公司,成都 611139;3.四川省辐安环境监测有限公司,成都 611139)
四川省是我国主要的核工业大省,拥有核设施、核技术利用、伴生放射性矿等数量众多、种类齐全的涉核单位,辐射环境质量监测和辐射预警任务重、责任大。四川省境内河流众多,水系发达,加之拥有众多工业工厂,水体中放射性的监测是四川省水体环境监测的重要内容之一[1]。对水体放射性水平实施监控,特别是在突发核与辐射事故状态下能够实时、快速、有效地监测环境水体中的放射性污染状况显得尤为迫切[2]。但普通的放射性监测系统只能用于某一固定流域水质放射性检测,为及时、准确、全面地获取监测水中γ 辐射剂量、温度、PH、溶解氧、电导和浊度等各类参数,亟需设计一种自动无人采样船,可用于日常环境和辐射事故应急监测中大型江河、湖泊的水体样品采集,同时满足在其他复杂环境下和一些人为无法到达的水域进行水体采样工作和γ 剂量监测工作,为环境评价、核设施管理和核与辐射安全应急提供技术支撑[3-4]。
1 功能需求
为满足监测、采样工作需要,尤其是核与辐射应急时的特殊要求,该无人采样船需具备以下功能:①该自动采样船装有高精度GPS 定位系统可到达指定流域并完成自动采样;②配备多参数分析探头,可实时监测水体的温度、pH、溶解氧、电导、浊度和γ 剂量等参数;③配备高清摄像头;④配备无线数据传输模块,可实时查看视频监控和各种监测数据;⑤采样软件系统具有水体采样数据存储、采样点位路线的布设,可自定义采样容量、采样数量等功能[5-7]。
2 系统设计
2.1 整体设计
可进行γ 剂量测量的无人采样船的整体设计如图1 所示。

图1 整体设计
2.2 船体设计
船体形态采用双M 船体,双气囊独立封闭设计,具有防沉、防颠覆、防水特性,整船防水密封重心低、阻力小、速度快、航行稳定。船体使用新型高强度复合材料制造,该材料是由S 级无碱玻璃纤维经编复合毡、凯夫拉防弹装甲材料及先进的纳米级碳素纤维等构成,使船体重量轻、方便携带,同时具有防撞、防磨损、防腐等特性。
船体使用2 个外置可拆卸涵道式推进器,与船壳底齐平形状一致,可浅水投放;放置与行驶可以很好地避免碰伤、撞击,有效地防止水草、渔网缠绕,安全可靠性高、安装维护和携带方便;推进器使用直流无刷电机;船体尺寸1 200 mm×700 mm×400 mm,有效载荷30 kg,最大航速4 m/s。船体使用高能锂离子电池供电,电池容量及规格为29.4 V-2×20 Ah;续航能力为2 m/s 满载时2 h,空载2.5 h;船体外部有预留接口可直接充电。
2.3 仪器设备
2.3.1 多参数探头
在双M 船体中间部位,预留了一个可放置探头的空洞,空洞上设置有固定装置,可固定探头保持稳定,多参数探头可通过该空洞直接与水体接触,探头入水深度固定保持在船体吃水线以下0.3 m,如图2 所示。水质多参数探头可实时监测水体的γ 剂量率,还根据客户需求进行定制,测量水体的温度、pH、溶解氧、电导及浊度等参数,如图3 所示。多参数扩展接口采用可拆卸提手,方便与无人船主体进行安装。内置可充电电池,传感器接口采用6 针电缆接头,支持多个同一规格的传感器接口和一个用于防玷污清洁刷接口。

图2 探头固定孔

图3 多参数探头
2.3.2 采样器
采样器通过一根预留的采样管与水体相连,采样管可自动收放,采样管伸入水中的长度可根据需要通过控制软件和遥控器设置,深度范围为0.1~1 m,满足环保行业水质采样深度为水面下0.5 m 处的采样要求;管路材质为硅胶管;采样管在船体运行时收缩,在采样时深入水中;采样器使用水泵通过采样管抽吸水体完成采样,水质采样时采样器将水管放到指定位置,采样时水泵抽吸流量保持不变,采水速度1 000 mL/min,通过控制采样时间完成采样到设置体积。同时,采样器具有管路清洁功能,支持单点采样、多点采样(分瓶采样),单次最大采样量为6 L,如图4 所示。
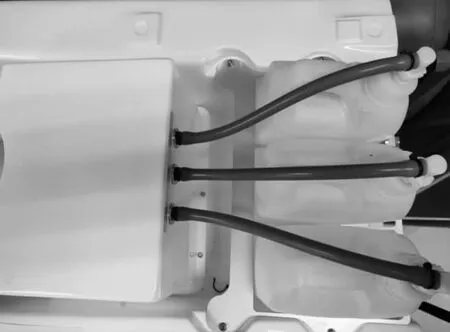
图4 采样器
2.3.3 摄像头和卫星定位
船体装在有高精度GPS 接收器,水平定位精度小于等于2.5 m,速度精度小于等于0.1 m/s;为方便操作和查看采样点周围环境,船体装有高清摄像头,摄像头清晰度为720 P,支持微光夜视功能,以保障在夜间也可完成采样工作,确保全天候的采样能力;卫星定位数据、视频数据均通过地面站实时传输至控制软件。
2.4 控制系统设计
2.4.1 主控系统
采样船可接收遥控器的指令并执行,包括模式切换、手动运行控制;采样船可以接收并执行地面基站的任务指令,根据船载定位信息,自主导航行驶,并可在无人工干预下自动完成工作任务,同时将采样船的数据信息发送回地面控制基站;采样船具备失联保护功能,当地面站与无人船通信失联后,采样船可自动回航至指定位置;采样船具备一定的避障能力,当采样船行驶中可实时探测与前方障碍物距离,并采取避障措施;最大探测距离不小于80 m,最多32 个目标,水平60°,垂直7°。
2.4.2 通信系统
遥控器与无人船采用RF 无线射频点对点通信方式,工作频率:2.4 GHz,开阔地段通信距离小于等于500 m;地面传输基站采用工业混搭设计,是一种适用于无人船的无线通信基站,支持高达150 Mbps 的实际TCP/IP 吞吐量,工作频率为5.8 GHz,通信距离小于等于2 km,通信范围内可进行数据传输和监控,可远程监控无人船动态。地面传输基站与电脑之间连接支持有线和无线连接2 种方式,可根据客户需求自行选择。用户可以用电脑通过网线与基站相连,在网口或网线出现故障时可切换用无线连接,最大程度保证连接的可靠性。
2.4.3 手持遥控器
遥控器可以控制无人船行驶,与地面基站对无人船控制权可切换;遥控器可随时控制,随时中断或随时改变工作任务;遥控器配备2 个摇杆,摇杆旋转范围360°。
2.4.4 地面控制基站和控制软件
地面操控平台为安装有控制软件的笔记本电脑或者平板,与遥控器对无人船控制权可切换,支持Windows 操作系统,使用研发的人机交互系统;控制软件可下载工作水域卫星地图,并存储和管理;可设置无人船行驶路线、返航路线等任务;可完成测流测绘、监测任务的存储,可进行历史任务数据的查询和反复调用。
地面操控平台可接收和显示无人船信息,实时显示在线监测结果;可通过图形动态显示无人船工作状态、位置状态、朝向,显示无人船电池当前电压、行驶速度等各类信息,对信号质量、电源余量等工作状态进行报警提示;控制软件可完成水质采样数据存储、在岸端控制软件地图上进行采样点位路线的布设,可自定义采样容量、采样数量。
2.5 主要设备清单
主要设备清单见表1。
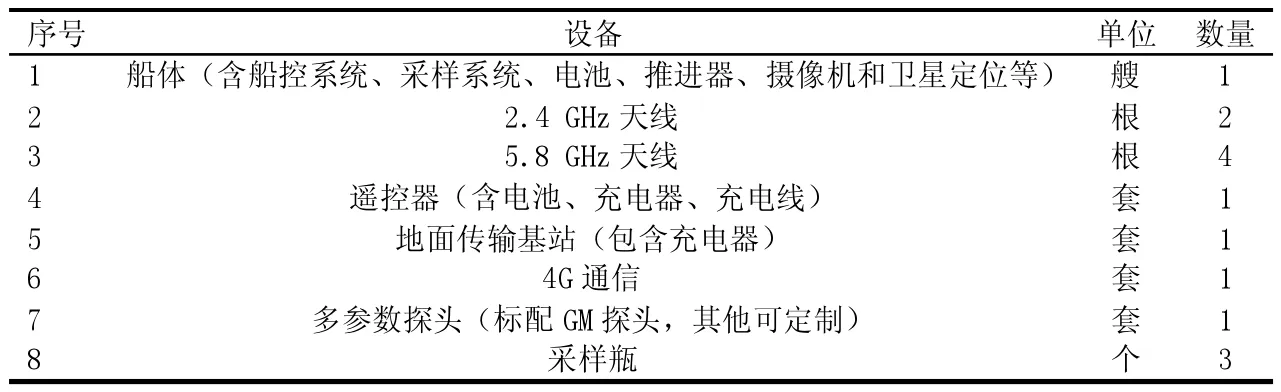
表1 主要设备清单
3 测试
3.1 准备
船体外观如图5 所示,采样船达到指定位置,完成充气、电源检查、连接天线配置服务器地址(如图6 所示)、检查遥控器功能情况(如图7 所示)、采样设置等工作。
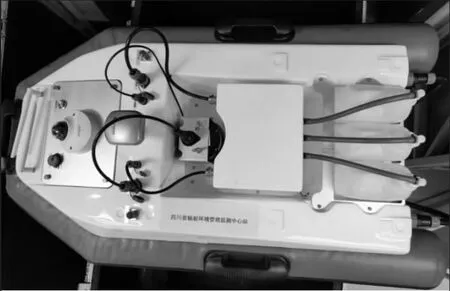
图5 船体

图6 连接界面

图7 遥控器
3.2 设置
当辐射事故应急采样时,先使用采样船对采样区域进行γ 剂量率巡测,对采样区域的γ 剂量率情况有基本了解,可推断出水体的放射性大致情况;然后根据γ 剂量率水平,选择高剂量点或者低剂量点进行采样,具体采样点可根据要求自行设置。如果现场可连接网络,地面控制软件可直接下载采样区域卫星地图,如无法下载地图,可在人工操作下使用采样船进行现场水域巡测,完成离线地图数据绘制,根据绘制的离线地图边界经纬度信息,自动画出安全航线边界后,可在离线地图上设置自动采样及监测参数,如图8所示。

图8 参数设置
3.3 采样
根据作业需求,先选择采水的航点勾选采水点,再设置各个采样点的采水量和采水深度及巡航速度。设置完成后点击发送设置,仪器将自动按照采样设置进行自动采样,如图9 所示。

图9 采样设置
3.4 数据展示
现场监测完成后,原始监测数据可根据需要导出,如图10 所示。

图10 数据导出
3.5 测试结论
经过多次采样测试和现场监测测试,该采样船可稳定实现设计功能需求,信号传输稳定性、自动采样、水体监测、数据传输功能等,均符合设计要求。
4 结论
本文根据核与辐射事故应急的需要,兼顾日常采样需求,设计了可进行γ 剂量测量的无人采样船,可在复杂环境下和一些人为无法到达的水域进行水体应急采样工作。该采样船可对水体的γ 剂量率进行监测,从而指导采样点的设置,提高对水体放射性水平监测的准确性;该系统具备的数据传输、视频监控、多点采样等功能,有效提高了辐射事故应急处置能力,避免了辐射工作人员的人工操作,提高了辐射工作人员的安全性,为四川省核与辐射应急体系的建设提供技术支持,为其他省设计类似无人采样系统的设计提供参考。