一种大型压力容器爬壁机器人的设计
2023-11-02余涵张文志赵志强郝继业
余涵,张文志,赵志强,郝继业
一种大型压力容器爬壁机器人的设计
余涵,张文志*,赵志强,郝继业
(内蒙古工业大学 机械工程学院,内蒙古 呼和浩特 010051)
在役大型压力容器需要定期检测,针对传统人工检测存在的难度大、成本高、周期长等问题,本文设计了一种轮式永磁吸附爬壁机器人。该机器人采用分体式结构,能够适应曲面作业。针对球型压力容器实际作业情况,建立了机器人在球面上的静力学模型,分析内、外壁面作业时可能发生滑移、倾覆和法向脱离的失稳条件。通过MATLAB仿真得到机器人在内、外壁面上爬行时最容易发生失稳的位置和单个磁轮的最小吸附力值,总结出保证机器人稳定工作应满足的条件。实验结果表明,该轮式永磁吸附爬壁机器人能够稳定吸附,满足设计要求。
大型压力容器;爬壁机器人;分体式;静力学分析
大型压力容器在各行业中主要用于储存易燃、易爆、有毒等特殊介质,如果容器损坏未能及时发现,会导致严重事故[1]。因此,定期对大型压力容器进行检修极为重要。目前大型压力容器以人工检测为主,如图1所示,检测时需要在压力容器内壁和外壁搭建手脚架,操作难度大、检测成本高、周期长、效率低。因此,设计适用于大型压力容器的爬壁检测、维护机器人具有十分重要的意义。
目前,爬壁机器人技术已经得到长足的发展,采用磁吸附、负压吸附、化学吸附、静电吸附以及仿生机械结构等吸附方式与轮式、足式、履带式、框架式、线索式等运动方法相结合,已研制出了多种爬壁机器人[2-3]。大型压力容器多为球型或圆柱罐体,检测维护时机器人需要携带无损检测、打磨、标定等设备或工具在管壁上稳定吸附,遍历待检测焊缝。此外,大型压力容器罐外表面常敷设有保温层,检测作业多需要进入罐内,而进入孔直径仅450 mm左右。同时满足较强的负载能力、能够适应曲面作业,结构尺寸小是大型压力容器检测机器人研制面临的难题。
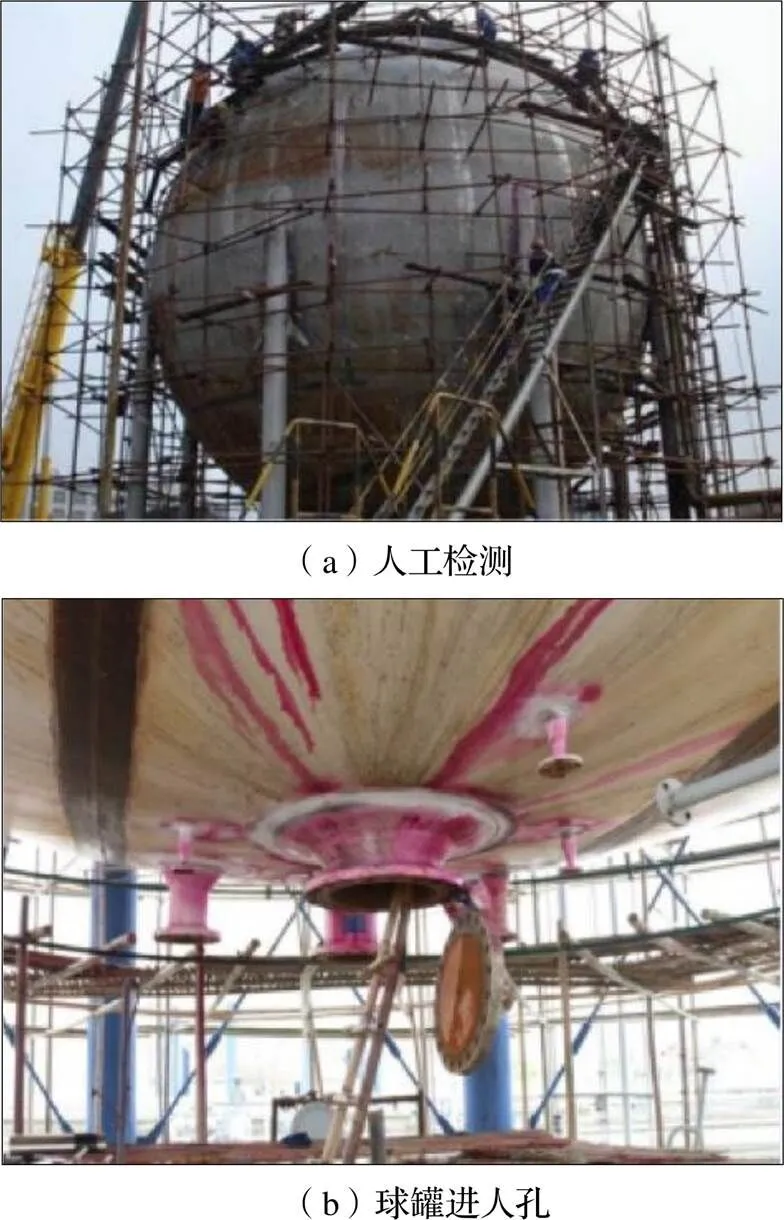
图1 球形压力容器
对于有一定负载要求的铁磁性壁面,永磁吸附较为适宜[4],轮式和履带式移动效率较高。邱仕诚等[5]针对大型储罐焊缝缺陷自动化检测问题,对机器人不同工况下的受力状态进行分析,研制出一种永磁吸附的轮式爬壁机器人,对称布置的辅助吸附轮提高了机器人的吸附能力。郭伟灿等[6]将磁轮与磁桥结构相结合,通过两种磁体位置布置来调节机器人的吸附力。王明强[7]针对传统履带式机器人转向效率和转向精确度低的问题,分析了机器人在不同倾斜壁面的行走条件,提出一种多履带全向磁吸附式爬壁机器人。姜德政[8]为提高机器人的吸附稳定性和运动准确性,分析了履带相关参数对滑移过程的影响,研制出一种滚动密封式结构的履带式爬壁机器人,采用一体式机器人结构,曲面运行时难以保证全部轮、履带与壁面完全贴合,进而会降低吸附能力。Li[9]研制了一款mecanum轮式检测机器人,通过mecanum轮附近的永磁体单元为机器人提供吸附力,利用可调节悬架,使机器人具备曲面自适应能力。Zhang[10]针对机器人的表面适应性问题,分析了机器人的失稳情况,设计了一种多自由度的移动机构,使机器人能够适应曲面工作。
尽管国内外学者在相关应用领域取得了一定的研究成果,但在减少自身重量和结构尺寸的同时能够适应曲面和提升负载能力上仍需要进一步研究,以更好地适应大型压力容器检测的工程实际。
本文设计一种分体式爬壁机器人,该机器人左右两侧车身通过一个转动连接机构相连,能自适应曲面,并能携带30 kg负载,具有结构相对简单、负载能力大,结构尺寸小的特点。针对球罐壁面吸附,考虑曲面特性分析了内外壁面上吸附的失稳条件,对于同类机器人的研制具有一定参考价值。
1 总体结构设计
机器人的总体结构设计如图2所示,包括车架模块、传动模块、吸附模块和电气模块。车架模块是机器人整体的基础框架,如图3所示,车架模块中的转动连接机构是机器人具有曲面自适应能力的关键,当机器人在复杂曲率的球面上行走时,磁轮的吸附力可以拉动弹簧,带动翻转轴、俯仰轴的自适应转动,使磁轮与球罐壁面的接触更充分,减小磁轮吸附力的损耗。机器人的传动模块由直流伺服电机、减速机、链轮和链条组成,两主动轮中心对称充分减小机器人体积。吸附模块采用永磁式磁轮为机器人提供吸附力,保证机器人在工作中可沿工作壁面稳定行走。
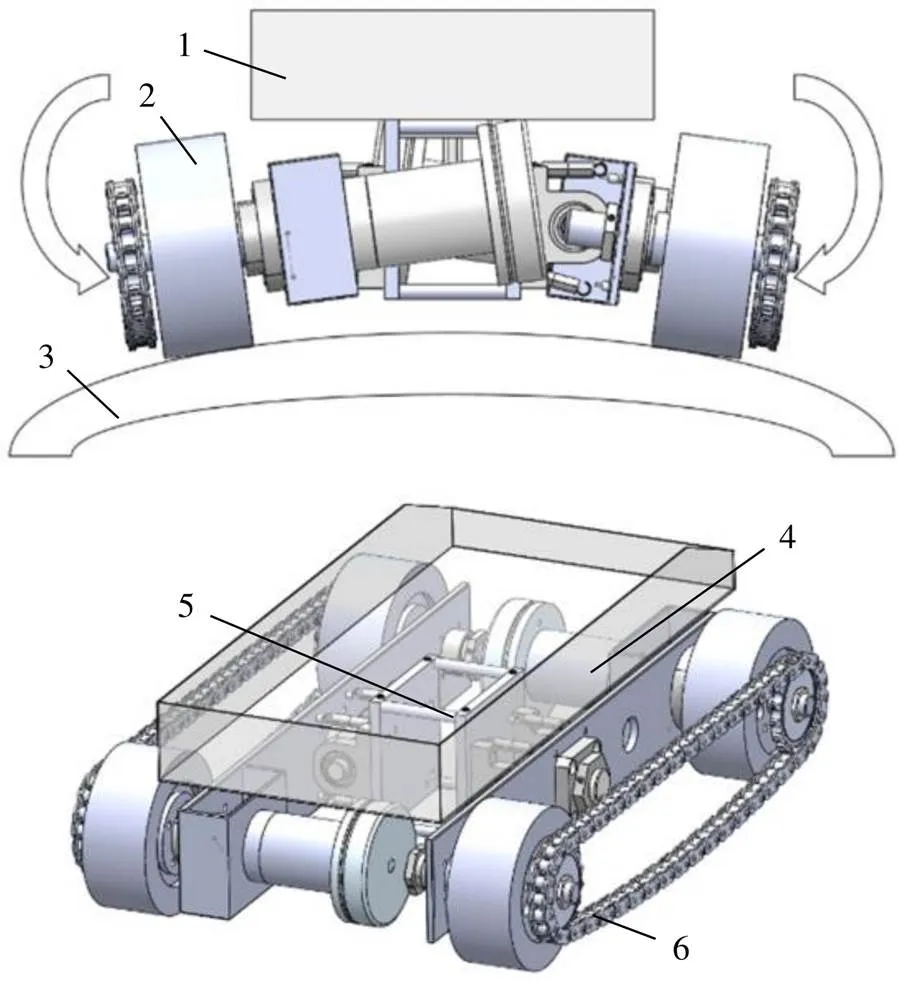
1.电气箱;2.永磁式磁轮;3.球罐;4.驱动装置;5.车架模块;6.链轮装置。
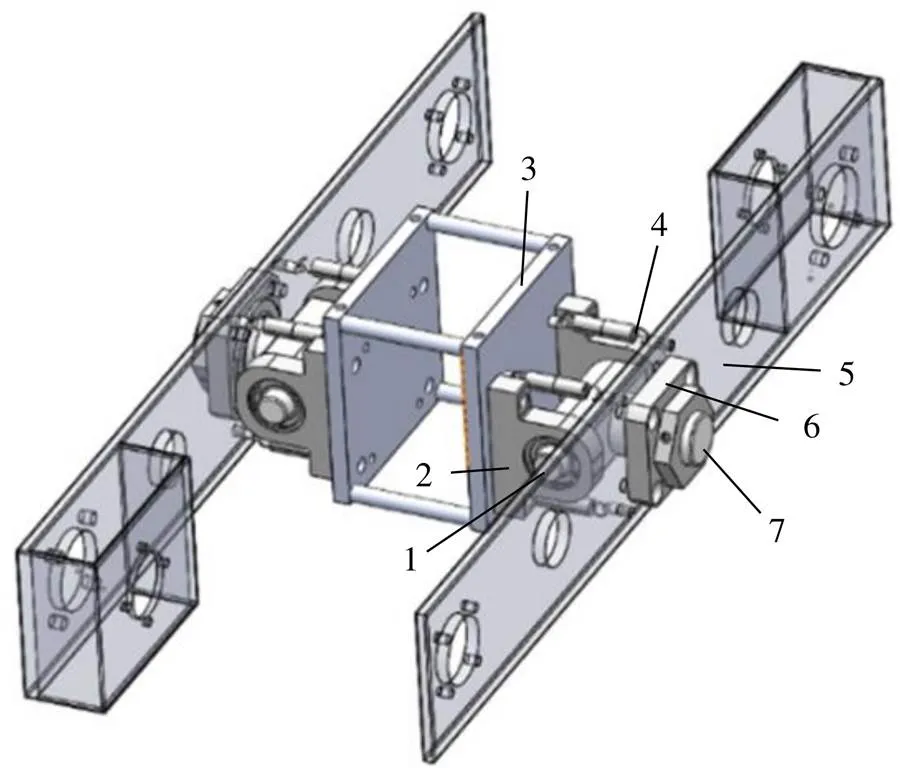
1.翻转轴;2.T型轴承座;3.机架;4.弹簧;5.侧板;6.方型轴承座;7.俯仰轴。
本文设计的机器人结构尺寸(长×宽×高)500 mm×390 mm×180 mm,负载能力30 kg,自重不超过30 kg,磁轮采用永磁表面滚花处理,与罐体的摩擦系数为0.7,单个磁轮的理论吸附力为427 N。
2 在球罐上的静力学分析
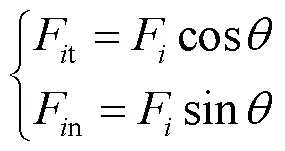
设单个磁轮提供的吸附力为F(=1~4),磁轮与球罐壁面接触点为P(=1~4),机器人重心所在平面为,如图4所示,为磁轮吸附力F与平面所形成的空间夹角,球面作业时四个轮子的相等。
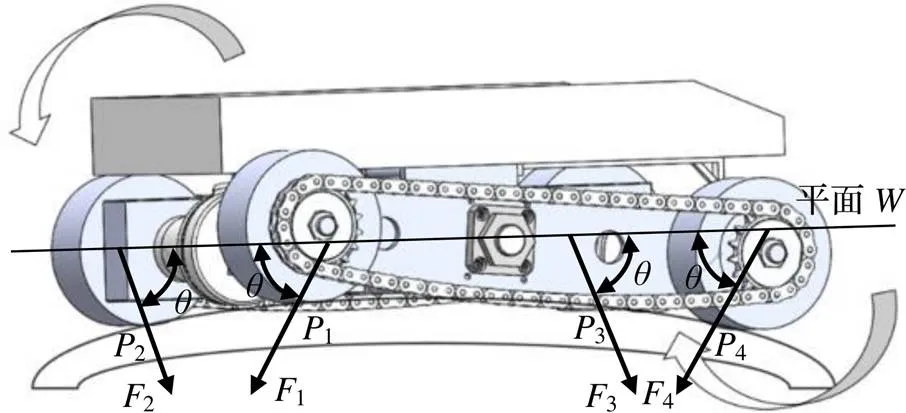
图4 吸附力方向与平面W关系
机器人在球罐外壁的位姿分析如图5所示。其中吸附力F垂直于球罐壁面,且1、2、3和4相交于点。
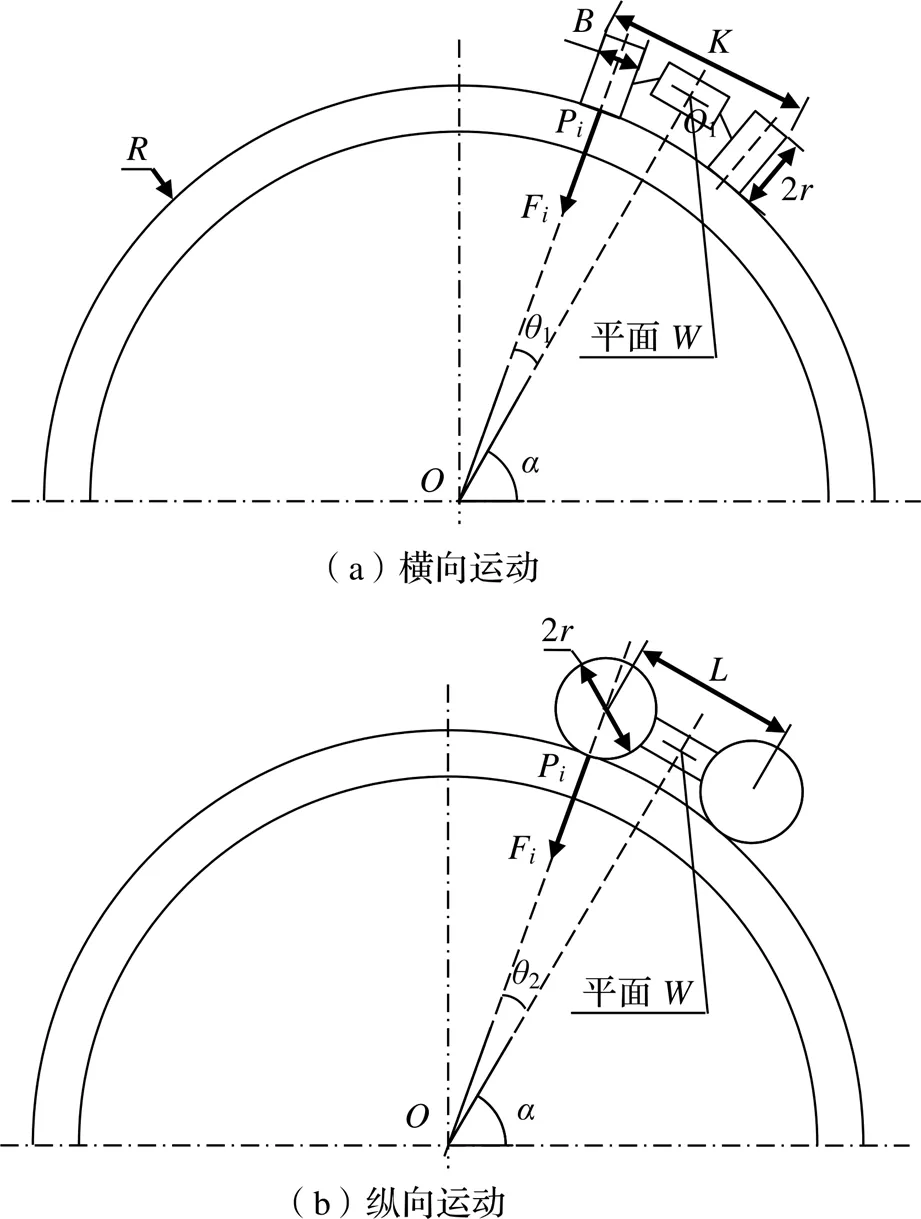
O为球罐的球心;O1为机器人的重心,即平面W的中心点;Fi为吸附力;α为OO1与水平面的夹角;θ1和θ2为横、纵向轮子吸附力与OO1的夹角;K为机身宽度;L为两轮中心距;B为磁轮宽度;r为磁轮半径;R为球罐半径
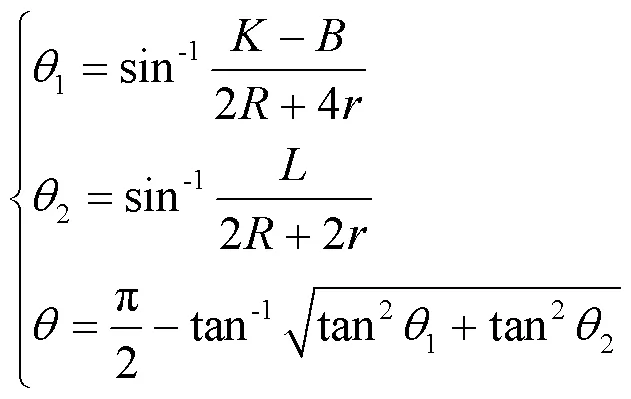
由图5可知:
2.1 沿工作壁面滑移
由图6可知:
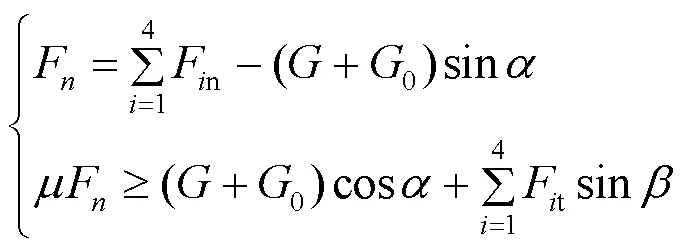
由图7(a)可知,机器人沿球罐外壁滑移时,若要避免发生滑移失效,则受力条件为:
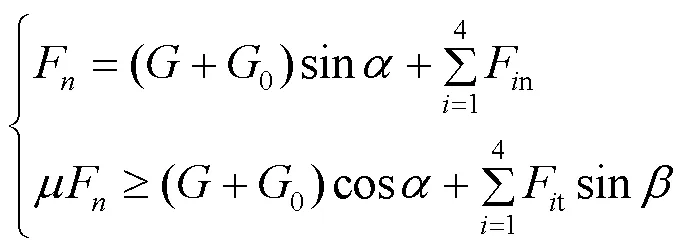
可得此时单个磁轮提供的吸附力应满足:
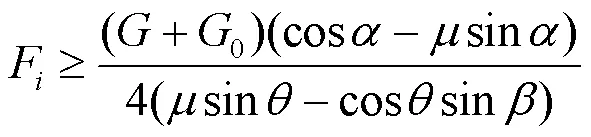
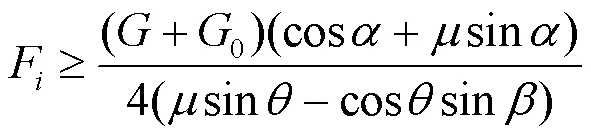
由图7(b)可知,机器人沿球罐内壁滑移时,若要避免发生滑移失效,则受力条件为:
可得此时单个磁轮提供的吸附力应满足:
2.2 纵向倾覆
机器人在球罐内外壁纵向运动时,机器人绕最下方两个磁轮接触点的连线发生翻转,最上方两磁轮的磁吸附力为机器人提供抗倾覆力矩,以向上运动为例进行分析,受力情况如图9所示。
由图9(a)可知,当机器人在球罐外壁爬行时,对点4进行力矩分析可得:
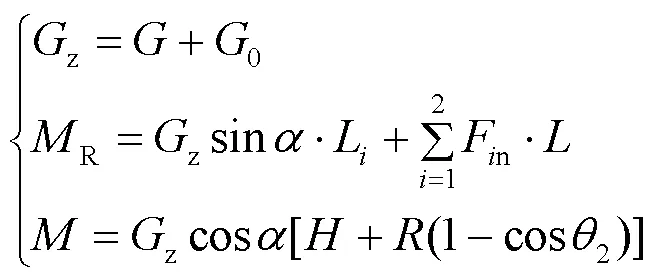
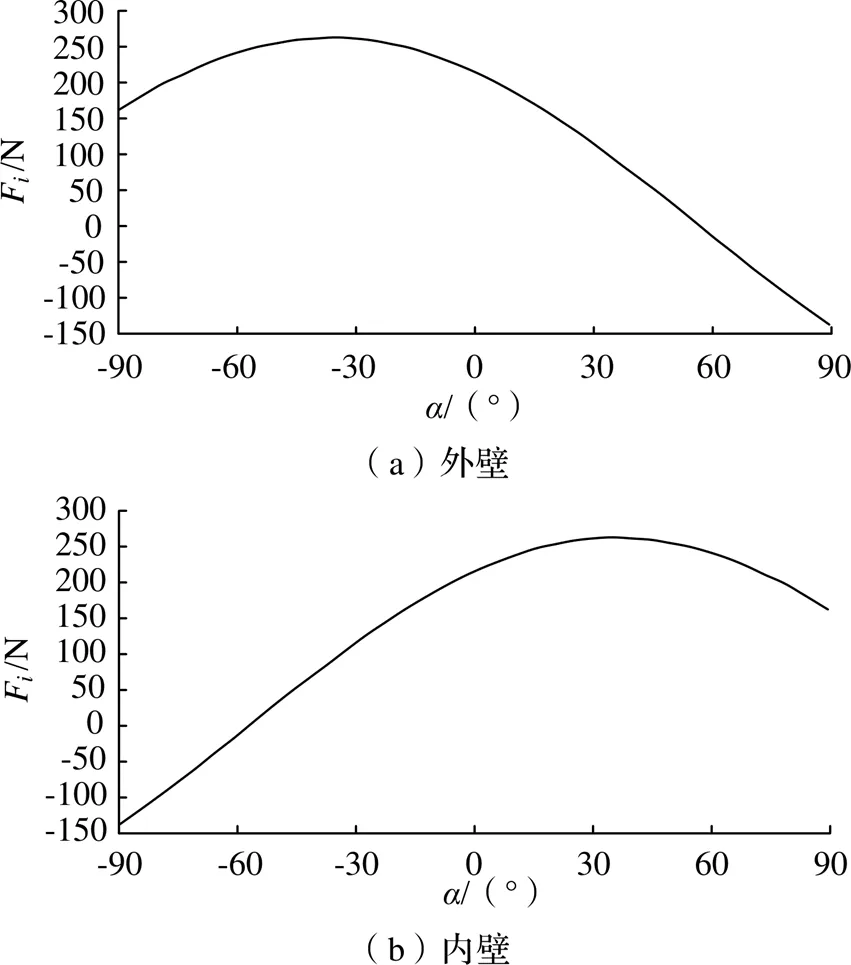
图8 机器人抗滑落仿真分析
为保证机器人不发生纵向倾覆失稳,则单个磁轮提供的吸附力应该满足条件:
则有:

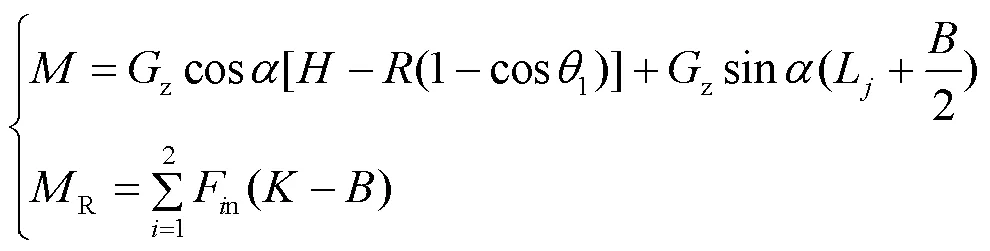
由图9(b)可知,当机器人在球罐内壁爬行时,对机器人进行抗纵向倾覆分析,可得:
若机器人不发生纵向倾覆,单个磁轮提供的吸附力应满足式(9),则有:


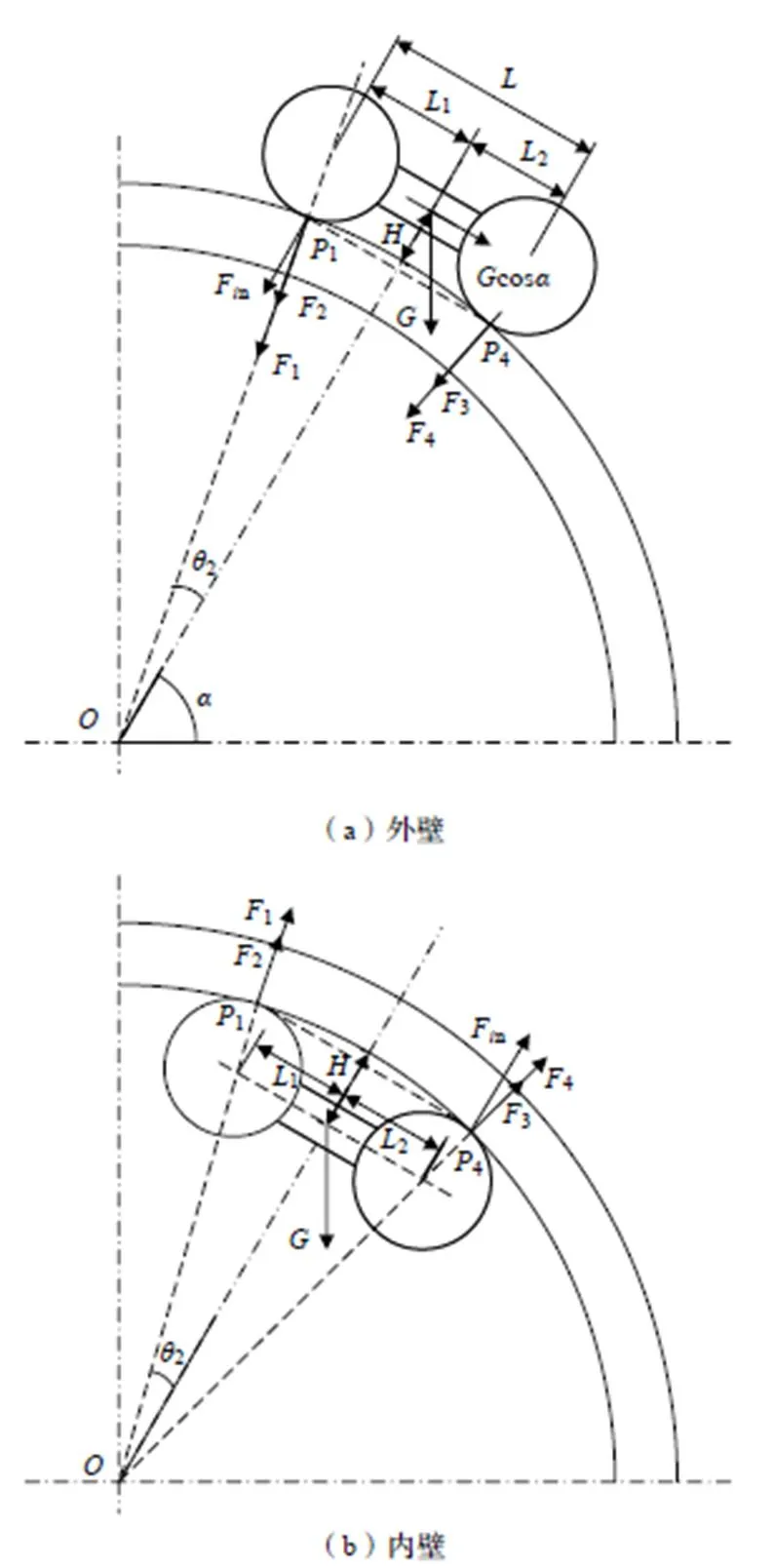
H为机器人重心距离球罐表面的高度;Li为机器人重心到磁轮轴线的垂直距离。
2.3 横向倾覆
机器人在球罐内外壁横向运动时,受力情况如图11所示。
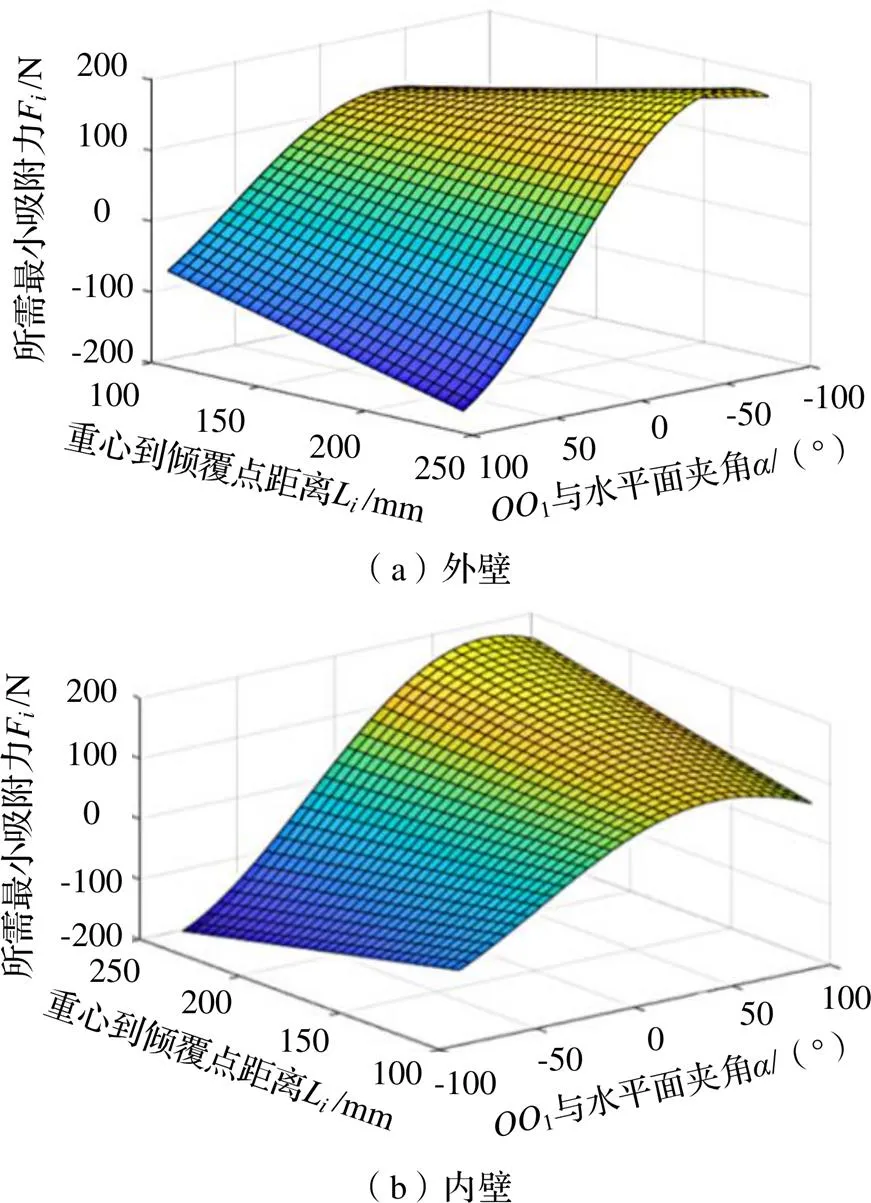
图10 机器人抗纵向倾覆仿真分析
由图11(a)可知,当机器人在球罐外壁爬行时,对点1进行力矩分析可得:
若机器人不发生横向倾覆,则单个磁轮提供的吸附力应满足式(9),则有:

由图11(b)可知,当机器人在球罐内壁爬行时,对机器人进行抗横向倾覆分析可得:
若机器人不发生横向倾覆,单个磁轮提供的吸附力应满足式(9),则有:

图11 机器人抗横向倾覆分析

图12 机器人抗横向倾覆仿真分析
2.4 法向脱离
若机器人在球罐外壁上不发生法向脱离,则应满足:
若机器人在球罐内壁上不发生法向脱离,则应满足:
2.5 吸附力极值计算
综合上述几种失稳情况的受力分析,总结各种情况下保证机器人稳定工作的最小吸附力值,得到机器人在内、外壁行走时单个磁轮吸附力应不小于261.82 N。
由于机器人工作时的稳定性受多方面因素影响,为保证机器人在工作时爬行和吸附的可靠性,引入安全系数=1.5[11],可得:
本文所设计机器人单个磁轮的吸附力为427 N,故该机器人可以在球罐内外壁上稳定工作,不会发生滑移、倾覆和法向脱离的情况。
3 性能测试实验
机器人样机如图13所示。
3.1 平面运动性能实验
在钢材壁面上对机器人进行手动行走实验,如图14所示。观察机器人的附壁能力、速度、转向效果等性能参数。通过不同参数下对样机的多次测试,得到结果如下:
(1)机器人单个磁轮的平均吸附力为404.54 N,与理论计算值427 N相差仅5.3%,证明机器人具有充足的吸附力。此外,为机器人施加近100 kg外力,机器人未与钢材壁面脱离,证明机器人良好的吸附性能。
(2)该机器人负载能力大于30 kg,平面直线行走速度最大可达6 m/min。在满负载的情况下,向前、向后爬行和转向效果良好,能够满足大型压力容器机器人的负载要求。
(3)实验发现机器人行走速度越慢,其转弯半径越小,机器人越灵活。当机器人行走速度为1 m/min时,转弯半径为186 mm。对机器人分别进行左、右转向测试,机器人均一次完成,转向过程中机器人爬行平稳,未出现倾覆打滑现象。

图13 机器人样机
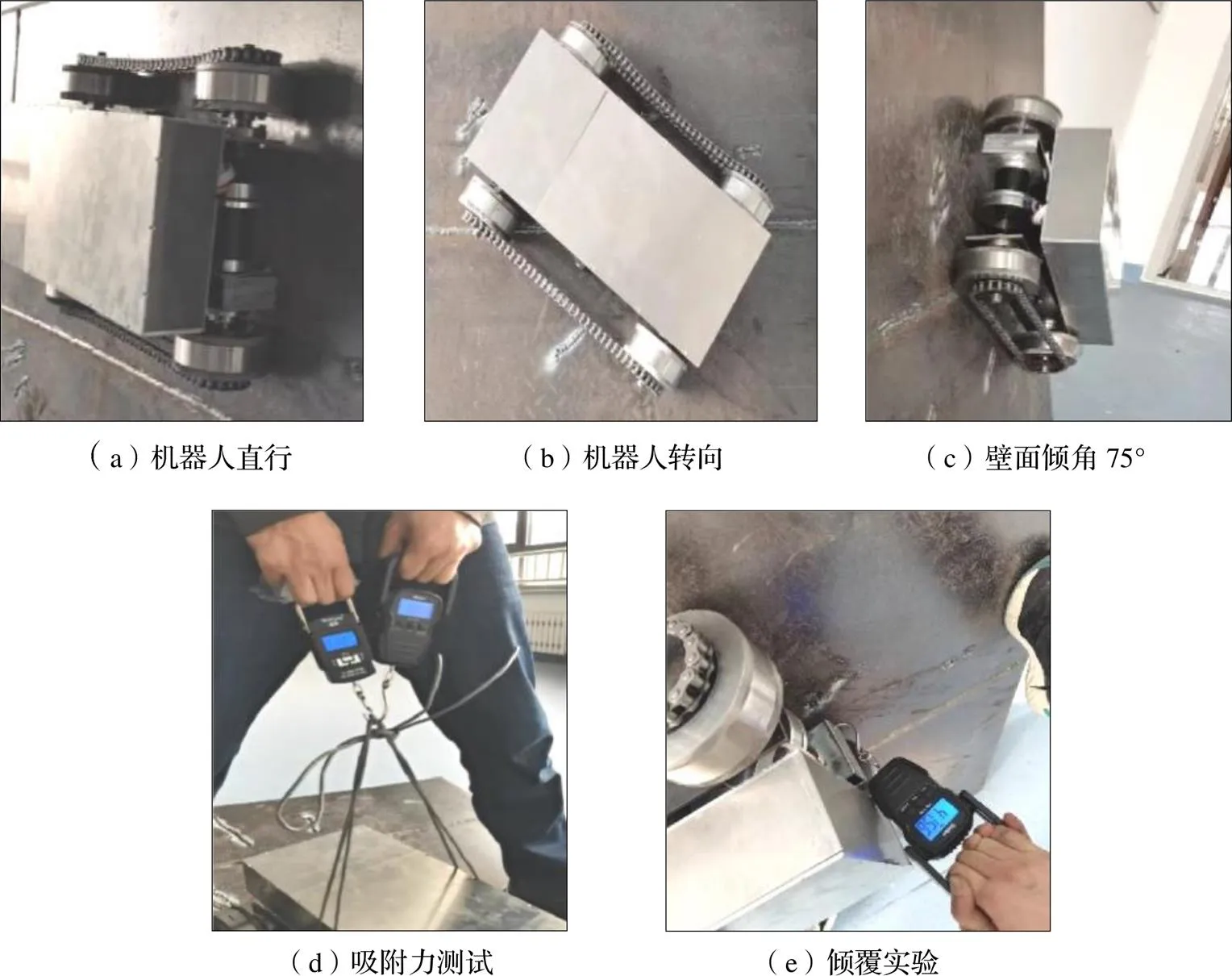
图14 样机平面运动实验
(4)机器人携带30 kg负载,以1 m/min速度直线行走10 m距离,机器人自身姿态角不超过1°。
综上所述,本文设计的机器人样机满足设计要求。
3.2 越障实验
球罐检测时,机器人需具备跨越焊缝的能力。球罐上焊缝高度为3 mm,因此在钢材壁面上增加高度为3 mm的焊缝,来测试机器人的越障能力,如图15所示。
在实验过程中,机器人可以轻松越过高度为3 mm的焊缝,没有出现打滑和倾覆的情况,故机器人样机越障能力满足设计要求,验证了本文设计的机器人可以在球罐内外壁上运动。
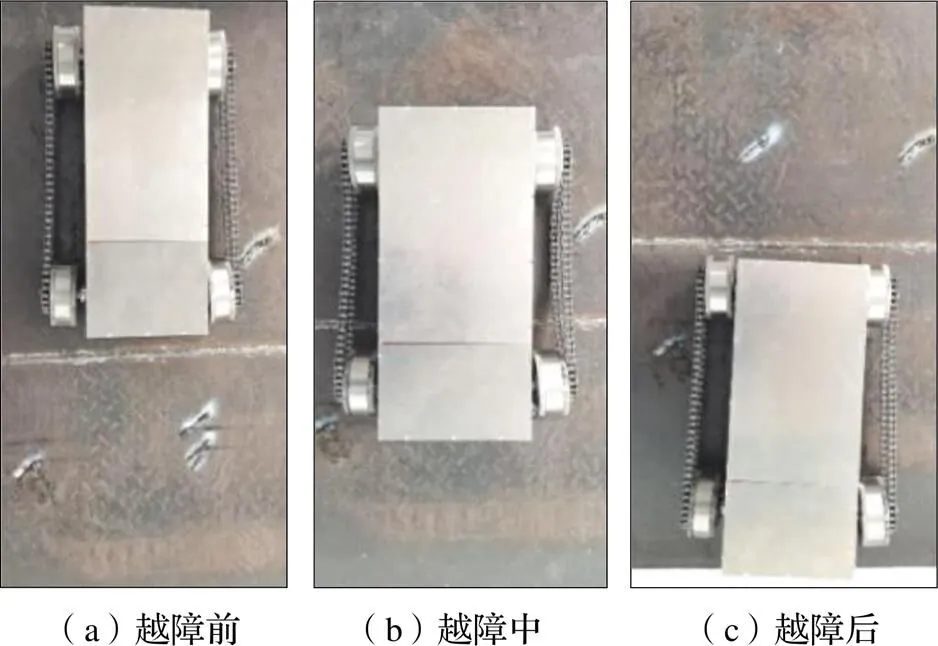
图15 机器人越障能力
4 结论
本文设计了一种具有曲面自适应能力的机器人机构,对机器人在球罐内外壁上的行走进行静力学分析,建立起机器人在滑移、纵向倾覆、横向倾覆、法向脱离四种失稳形式下的力学模型,并通过MATLAB软件进行仿真计算,得出机器人在四种失稳情况下的数据,结合机器人实际工作环境,计算出保证机器人稳定工作的条件为:单个磁轮提供的吸附力不小于392.73N。由机器人性能实验可知,本文设计的机器人样机满足设计要求。
[1]魏正祥. 探讨承压类特种设备无损检测现状[J]. 中国金属通报,2019(7):138-139.
[2]Daniel Schmidt,Karsten Berns. Climbing robots for maintenance and inspections of vertical structures: A survey of design aspects and technologies[J]. Robotics and Autonomous Systems,2013(61):1288-1305.
[3]Chu Baeksuk,Jung Kyungmo,Han Chang-Soo. A Survey of Climbing Robots: Locomotion and Adhesion[J]. International Journal of Precision Engineering And Manufacturing,2010(12):633-647.
[4]Fumin Gao,JianChun Fan,Laibin Zhang,et al. Magnetic crawler climbing detection robot basing on metal magnetic memory testing technology[J]. Robotics and Autonomous Systems,2020(125):1-13.
[5]邱仕诚,伍剑波,赵恒忠,等. 一种基于磁力吸附的储罐爬壁机器人本体设计[J]. 中国机械工程,2022,33(3):270-278.
[6]郭伟灿,郑慕林,凌张伟,等. 大型承压设备爬壁机器人磁桥设计和试验研究[J]. 机电工程,2020,37(5):588-592.
[7]王明强,陈锦,方海峰,等. 新型多履带全向爬壁机器人结构设计[J]. 机械设计与制造,2021(5):208-211.
[8]姜德政,胡军,钟恒,等. 一种滚动密封爬壁机器人的安全吸附条件与运动特性分析[J]. 中国机械工程,2021,32(22):2757-2764.
[9]Li Jie. Weld line recognition and path planning with spherical tank inspection robots[J]. Journal of Field Robotics,2022,39(2):131-152.
[10]Zhang Minglu. Optimization design and flexible detection method of a surface adaptation wall-Climbing robot with multisensor integration for petrochemical Tanks[J]. Sensors,2020,20(22):1-20.
[11]姜红建. 面向船舶除锈机器人的磁吸附爬壁轮优化设计[D]. 杭州:浙江大学,2018.
Design of a Wall Climbing Robot for a Large Pressure Vessel
YU Han,ZHANG Wenzhi,ZHAO Zhiqiang,HAO Jiye
( School of Mechanical Engineering, Inner Mongolia University of Technology, Hohhot 010051, China )
Large pressure vessels in service need regular inspection. Aiming at solving the problems such as great difficulty, high cost and long period in traditional manual inspection, we design a wheeled permanent magnet adsorption wall-climbing robot. With a split structure, the robot can adapt to curved surface operation. According to the actual working situation of spherical pressure vessel, the static model of the robot on the spherical surface is established. We then analyze the instability conditions that may occur when the inner and outer walls are working. Through MATLAB simulation, we obtain the position where the robot is most prone to instability when crawling on the inner and outer walls and the minimum adsorption force of a single magnetic wheel. The conditions that should be met to ensure the robot to work stably are summarized. The results show that the robot can stably adsorb. It meets the design requirements.
large pressure vessel;wall-climbing robot;split type;statics analysis
TP242
A
10.3969/j.issn.1006-0316.2023.10.011
1006-0316 (2023) 10-0060-09
2023-01-12
内蒙古自治区科技计划(2021GG0260);内蒙古自治区自然科学基金(2020LH06003)
余涵(1998-),女,山东单县人,硕士研究生,主要研究方向为机器人、机电装备,E-mail:1910595809@qq.com。
通讯作者:张文志(1972-),男,内蒙古呼和浩特人,博士研究生,副教授,主要研究方向为机器人、机电装备,E-mail:robotzwz@163.com。
