无控交叉口风险预警系统下驾驶行为可靠度分析
2023-10-31郭凤香李光晟倪定安杨文臣田毕江
郭凤香, 李光晟, 倪定安, 杨文臣, 田毕江
(1.昆明理工大学 交通工程学院, 云南 昆明 650200;2.云南省交通规划设计研究院 陆地交通气象灾害防治技术国家工程实验室, 云南 昆明 650200)
交叉口是交通网络的重要节点,不仅影响道路的通行能力,并且存在大量交通冲突,是交通事故的多发地之一,特别在无控交叉口,其事故发生率要远高于有控交叉口。目前我国道路无控交叉口交通情况复杂,比如交叉口处不同类型的车辆、交叉口处视线遮挡、交通冲突点多等问题[1]。在这种复杂情况下,驾驶人不会在第一时间发现风险并做出正确的判断,从而引发交通事故。为解决无控交叉口事故多发问题,Yan等[2]探究了视距条件与驾驶员识别潜在风险能力的关系,研究表明良好的视觉条件能很好地提高驾驶员紧急避碰性能。卢涛等[3]提出基于安全距离的避碰预警方法,来缓解无控交叉口的碰撞问题。除此之外还可以设置风险预警系统对交叉口交通状态进行实时感知,及时发布有效的警示信息,主动提醒车辆注意周围车辆,从源头主动实现交通事故风险的主动防控和安全提升。
本文提出的风险预警系统就是根据交叉口的交通情况实时预报交叉口交通信息的可变信息标志。现今对于交通可变信息标志有一定的研究,如构建交通可变信息标志选址优化模型[4],之后采用遗传算法对优化模型进行求解[5-6];基于驾驶人视觉理论和认知特性建立可变信息标志信息量的量化方法及可变信息标志认知模型,并对认知模型进行评价分析[7-8]。
预警系统有效性可以通过驾驶人的驾驶行为特性进行表征,可靠度可以很好反映驾驶行为的安全性,所以可以通过可靠度来反映预警系统的有效性,在人-车-路-环系统中,驾驶人可靠性直接影响整个行车系统的可靠性。驾驶人可靠性指在一定的道路环境下,驾驶人在驾驶过程中能够安全完成驾驶任务且能有效实现汽车运行功能的能力,而驾驶人的可靠度是对可靠性的概率量化。目前有关驾驶人行为可靠性的研究并没有统一的方法,主要是对驾驶人行为进行定性描述,比如对驾驶行为模型进行综述,分析驾驶人安全可靠性的影响因子;对驾驶人差错进行分类;给出驾驶人可靠性计算模型;针对驾驶人行为差错提出预防措施,提高行车安全性[9-12];除此之外也有通过驾驶人反应时间推算驾驶人差错概率[13]。
由此可知,现今研究主要是围绕预警系统的布设位置、认知及有效性进行的,并没有从驾驶人可靠度的角度来判定预警系统的有效性。为分析预警系统在无控交叉口的有效性及最优布设距离,本文通过驾驶模拟试验采集驾驶人驾驶行为数据,用广义可靠度计算方法计算驾驶人在有无预警系统及预警系统不同布设位置情景下的驾驶行为可靠度,通过驾驶行为可靠度来反映预警系统的有效性,最后采用数据分析软件分析驾驶人驾驶行为总体可靠度与驾驶人各指标的相关关系,找出影响驾驶人可靠性的主要因素。
1 实验内容
本文根据驾驶人驾驶行为数据,对比分析有无预警系统下以及预警系统布设不同位置下的驾驶人驾驶行为可靠度差异,即无风险预警系统与有风险预警系统、不同位置布设预警系统的交叉口安全性对比,检验预警警示系统的安全性和有效性以及验证预警系统布设的最佳距离。
本文风险预警系统的工作原理是当位于主路(支路)上的地磁车辆检测器检测到有车辆经过时,会将信号传输至位于支路(主路)路侧的预警系统,预警系统对预警警示牌的显示信息进行实时调整。本文的风险预警系统具体布设位置及显示策略来源于现实实际交叉口设置的预警系统显示现状,具体显示为如下。
1) 侧向有来车:侧向有来车时依次在预警牌上闪烁图1的信息图,闪烁频率为0.16 s,周期为1 s。

图1 侧向有来车预警信息图
2) 侧向无来车:侧向无车时依次在预警牌上闪烁图2的信息图,闪烁频率为0.16 s,周期为1 s。

图2 侧向无车预警信息图
1.1 实验设备
实验首先采用昆明理工大学自主研发的VS-Design三维场景设计软件搭建静动态试验场景,之后采用昆明理工大学交通工程学院自主开发的DSR-1000TS 2.0型驾驶模拟系统以及i-View HED 4眼动仪进行实验,收集驾驶过程中驾驶人行为数据,见图3。

图3 驾驶模拟系统平台及眼动示意图
对于驾驶模拟器及相关实验数据有效性的验证,陈亮等[14]基于模糊神经网络模型构建驾驶模拟器有效性综合评价指标体系,对驾驶模拟器实验的有效性进行评价,最终评价结果较好,实验输出数据相对真实可靠。
1.2 实验场景
为对比分析有无预警系统及预警系统布设距离对驾驶人驾驶行为的影响,运用自主开发VS-Design场景设计软件,根据实际山区二级公路道路数据及实测交通流量,搭建不同类型交叉口的静态实验场景,同时加入动态车流,加入动态交通流后,场景中会出现侧向来车、对向来车、通向跟车及行人通行等情况。交叉口设计见表1,实验场景示意见图4。
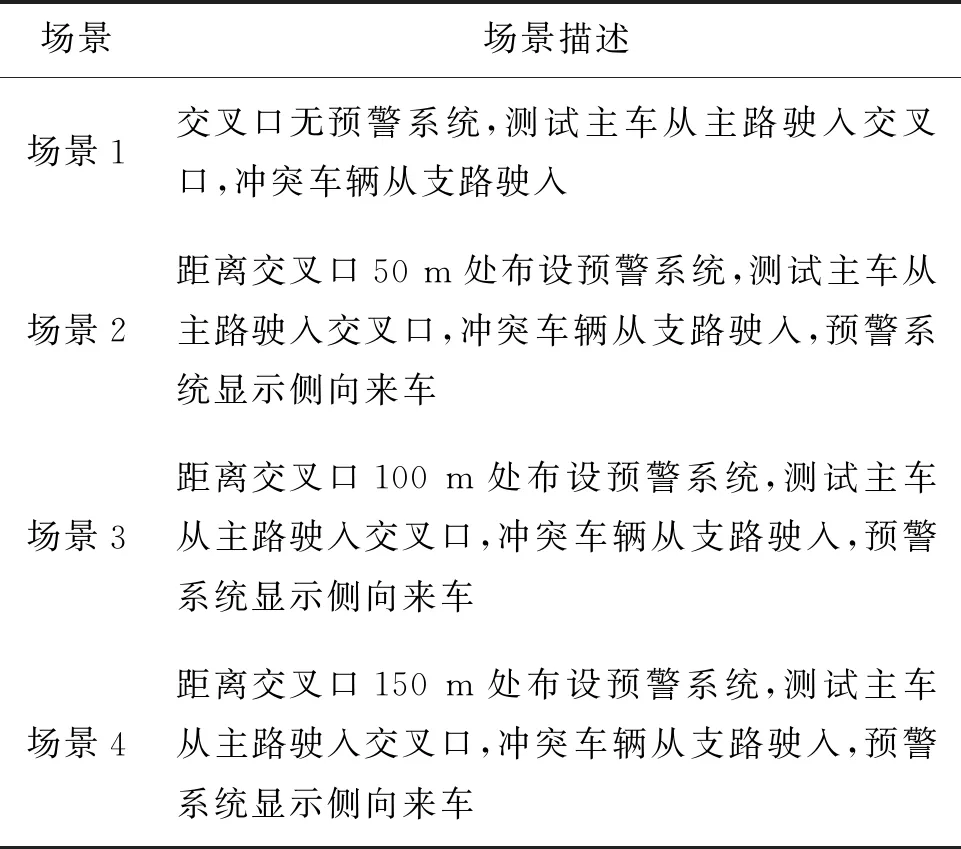
表1 实验场景设计

图4 实验场景示意图
1.3 实验流程
为分析无控交叉口预警系统下的驾驶人操作可靠度,在社会中随机招募具有丰富驾驶经验的45名驾驶人,其中20至60岁中青年驾驶人25名(包含13名男性和12名女性,男女驾驶人比例为1.08∶1,驾驶人平均年龄为39岁,标准差9.56),60岁以上老年驾驶人20名(包含13男性和7名女性,男女驾驶人比例为1.85∶1,驾驶人平均年龄为64岁,标准差3.52)。招募的驾驶人要求具有2年以上驾驶经验及2万公里驾驶里程,并且所招募的驾驶人无色盲,有自主判断能力。
正式试验之前,测试者需填写基本信息和相关问卷,然后对被试者进行简单的培训,确保被试者能够正确完成驾驶任务,最后进行驾驶模拟器适应性测试,保证被试者实验数据真实有效。完成上述所有环节后,进行正式试验,正式试验时首先给被试者佩戴眼动仪,按照五点标定法对被试者眼动进行标定,确保能够清楚捕捉被试者的注视点,之后被试者启动驾驶模拟器按照日常驾驶习惯根据要求路线完成驾驶任务。
1.4 实验数据采集及处理
本次实验数据主要通过DSR-1000TS 2.0型驾驶模拟系统、i-View HED 4眼动仪进行采集,包括了驾驶人操作行为数据、车辆运行数据和眼动数据。
驾驶人操作行为数据和车辆运行数据是由驾驶模拟器获得,驾驶模拟器产生的数据包含有pth文件和rep文件,pth文件包含主车的各类数据(速度、加速度、油门踏板深度、制动踏板深度),rep文件包含其他车辆运行数据,对于驾驶人操作行为数据和车辆运行数据主要是将pth文件转换成Excel文件,本次实验所选用的数据为每个交叉口前后100 m内的数据段。
眼动数据是通过眼动仪进行采集,之后对实验中采集到的数据文件及视频文件用BeGaze 3.5软件进行处理提取,在数据文件中包含了驾驶人注视、扫视和眨眼等相关数据,将提取出的txt文件转换成Excel文件,之后分别截取驾驶人在每个交叉口前后100 m内的数据段。
2 驾驶人驾驶行为过程分析
驾驶人驾驶行为过程可以分为信息感知(S)、信息判断处理(O)和驾驶人操控(R)3个模块,基本可以概括为车辆在运行过程中车辆信息、道路环境信息等通过感知器官传入大脑,大脑对各类信息进行分析判断,然后对不同的交通环境产生不同的决策指令,最后通过运动中枢传递给四肢进行车辆的操作[15-16],其过程见图5。驾驶人行为不是S-O-R简单的串联组合,而是多次的S-O-R并联组合[17]。

图5 驾驶人驾驶行为过程框架图
驾驶行为内在结构的复杂化和外部表现方式的多样化,一定程度上造成驾驶行为的不确定性和无序性,从而可能导致驾驶人失误的发生。驾驶人失误是指驾驶人在信息感知、信息判断处理及车辆操控3个阶段可能发生的差错,在驾驶差错产生后未能及时予以恢复且持续一段时间后产生违背驾驶人意愿的不良结果,可能导致交通事故或选择了错误的路线。根据驾驶人S-O-R理论,驾驶人可靠度计算如下式:
R(t)=RS(t)RO(t)RR(t)
(1)
式中:RS(t)为驾驶人感知可靠度;RO(t)为驾驶人判断可靠度;RR(t)为驾驶人操作可靠度。
根据驾驶人可靠度计算公式,提出对于连续的驾驶过程中,驾驶人驾驶过程中操作可靠度为RR(t),则:
RR(t)=R1(t)R2(t)R3(t)
(2)
式中:R1(t)为驾驶人加速行为可靠度;R2(t)为驾驶人速度可靠度;R3(t)为驾驶人制动行为可靠度。每个R(t)都形为
(3)
式中:λ(t)为驾驶员t时间内的失误概率,为:
(4)
(5)
式中:μ为均值;σ为标准差。
3 驾驶人行为可靠度
驾驶人行为可靠度是对驾驶人失误概率的量化,是驾驶人能够安全完成驾驶任务且能有效实现汽车运行功能的能力。本文通过注视来反映驾驶人对信息的感知和判断,采用注视时间来反应驾驶人的感知判断可靠度。在驾驶操作行为阶段,选取速度、油门踏板开合度、制动踏板开合度作为分析指标反应驾驶操作行为可靠度。
3.1 驾驶人感知判断可靠度
注视时间是驾驶人一次注视行为所花费的时间,反映驾驶人是否存在分心驾驶,注视的时间越长对外界刺激信息的处理难度就越大,导致分心驾驶的可能性增加,其可靠度越低。根据BeGaze 3.5眼动仪数据,计算出各被试者经过交叉口时注视时间的均值和方差,然后根据式(3)~(5)计算感知判断可靠度,见图6。

图6 预警系统不同布设距离及不同驾驶人感知判断可靠度对比图
通过对感知判断可靠度分析,发现布设预警系统情况下驾驶人可靠度均值均高于无预警系统情况,且预警系统布设在100 m处时,驾驶人感知判断可靠度略高于其他位置,预警系统对40~60岁驾驶人的感知判断作用更加显著。通过对比不同性别驾驶人,女性驾驶人感知判断可靠度明显高于男性驾驶人。
3.2 驾驶人操作行为可靠度
3.2.1加速行为
在驾驶过程中,驾驶人不断对外界环境进行感知判断,通过控制油门踏板深度实时对车辆加速度进行控制。驾驶员对加速度的控制主要是通过踩下油门踏板的深度,对加速度的控制情况可以间接地体现车辆运行可靠度。
基于驾驶模拟器车辆基本数据,计算出各被试者在经过交叉口时的油门踏板深度均值和方差,之后根据式(3)~(5)计算加速行为可靠度,结果见图7。

图7 预警系统不同布设距离及不同驾驶人加速行为可靠度对比图
通过油门踏板开合度分析,发现预警系统布设在100 m处时,驾驶人加速行为可靠度比其他位置较高,并且随着年龄的增加可靠度有所降低。对比不同性别驾驶人时,女性驾驶人加速行为可靠度明显高于男性驾驶人。
3.2.2制动行为
制动行为发生在驾驶人进入交叉口前,驾驶人是否采取制动行为反映驾驶人是否注意到预警系统,从侧面反映预警系统有效性。本文采用制动踏板开合度来表示驾驶人是否采取制动行为。
基于驾驶模拟器的车辆基本数据,计算出各被试者制动踏板深度的均值和方差,然后根据式(3)~(5)计算被试者制动行为可靠度,结果见图8。
通过对制动踏板开合度的分析,发现有预警情况下老年驾驶人的制动行为可靠度提高明显,说明预警警示系统对老年驾驶人的制动行为作用明显,可靠度有明显提高。由图8(b)可知,女性驾驶人可靠度要普遍高于男性驾驶人,说明女性驾驶人在驾驶过程中更加稳重,能够更好地判断交叉口情况,并提前采取制动。
3.2.3车辆运行速度
速度是驾驶人一系列的操作行为的结果,反映出车辆运行的平稳状态及舒适程度。基于驾驶模拟器的车辆基本数据,计算出各被试者车辆运行速度的均值和方差,根据式(3)~(5)计算被试者在驾驶车辆过程中速度可靠度,见图9。
通过对速度的分析,发现预警系统下速度可靠度高于无预警下的车速可靠度,说明预警警示系统可以提前给驾驶人道路信息,提醒驾驶人以最合适的车速快速通过交叉口。根据图9(a)可知预警系统布设在100 m处时各个年龄段驾驶人速度可靠度相对较高并没有太大差异,且40岁以上驾驶人速度可靠度普遍增加。由图9(b)可知,女性驾驶人速度可靠度明显高于男性驾驶人。
3.3 驾驶人驾驶行为总体可靠度
驾驶人驾驶行为总体可靠度通过感知可靠度、判断可靠度、操作可靠度计算得出,其中驾驶人操作可靠度由加速度行为可靠度、制动行为可靠度、速度可靠度根据式(2)计算得出,之后由式(1)计算驾驶人驾驶行为总体可靠度,见图10。
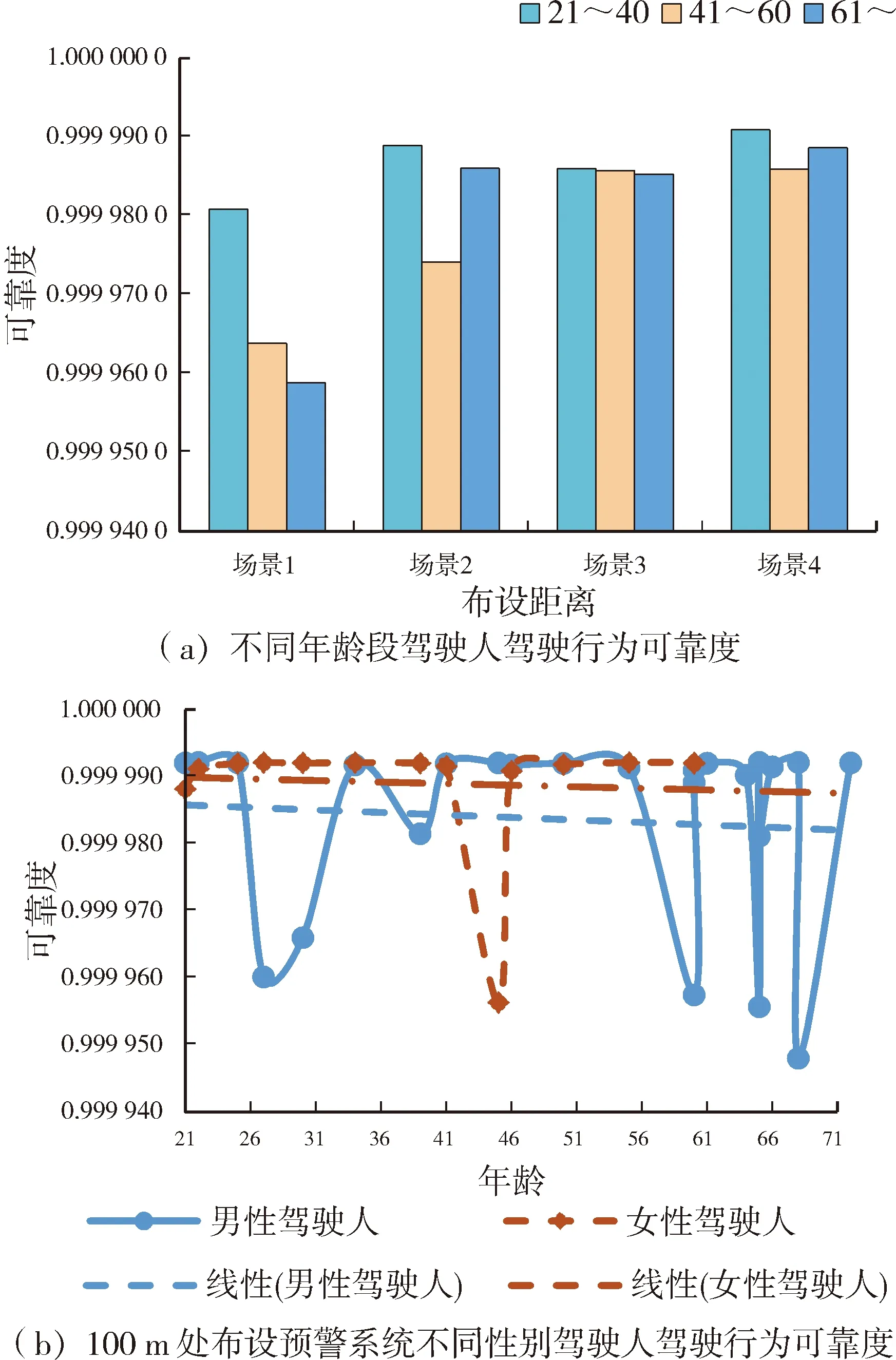
图10 预警系统不同布设距离及不同驾驶人驾驶行为可靠度对比图
由图10预警系统不同布设距离下的操作可靠度的对比分析发现,有预警情况下驾驶人操作可靠度高于无预警情况。预警系统布设在100 m处时,随着年龄的增长,驾驶人驾驶行为总体可靠度会呈下降趋势,说明随着年龄的增长,驾驶人的感知判断能力、操作能力等方面都会有所下降,都会影响到驾驶人驾驶行为可靠度。通过对比分析不同性别驾驶人驾驶行为总体可靠度可知,女性驾驶人可靠度要高于男性驾驶人可靠度, 并且随着年龄的增长可靠度也有所降低,说明女性驾驶人在驾驶过程中更加稳重,能够更好地判断交叉口情况,并提前采取措施,进行规避风险。
4 Kendall相关性分析
Kendall[18]相关性分析方法利用两个随机变量X和Y的协同一致性和非协同一致性的概率之差表示相关关系,不仅可以度量变量间的线性关系,还可以度量非线性关系。Kendall相关性表达式为:
(6)

采用数据统计分析软件对驾驶人的性别、年龄、驾龄、行驶里程、感知判断可靠度、加速行为可靠度、制动行为可靠度、速度可靠度以及驾驶行为总体可靠度进行相关性分析,结果见表2。

表2 驾驶人各指标间相关性
由表2可得出以下几条结论。
1) 驾龄、行驶里程、加速行为及速度可靠度与驾驶行为总体可靠度的相关系数分别为-0.456**、-0.320**、0.696**、0.667**,具有显著相关性,说明驾驶人驾驶经验以及对于车辆的操作都会对驾驶行为可靠度具有较大影响。
2) 年龄与驾龄、行驶里程呈正相关关系,但与感知判断可靠度、加速行为可靠度、制动行为可靠度以及驾驶行为总体可靠度呈现负相关关系,说明随着驾驶人年龄的增加,其驾龄与驾驶里程自然有所增加,但驾驶人的感知判断能力、反应能力和执行能力都有所下降,在驾驶过程中更容易出现失误,最终影响驾驶人驾驶行为总体可靠度。
3) 驾驶行为总体可靠度与加速行为和速度可靠度具有显著相关,说明油门踏板开合度以及驾驶人对于速度的控制对驾驶行为总体可靠度影响较大。
5 结 论
通过对驾驶人驾驶行为总体可靠度的分析,得出如下结论。
1) 通过有无预警系统下驾驶人驾驶行为可靠度的对比分析,发现有预警的驾驶行为可靠度高于无预警的情况,侧面说明预警系统可以提前给驾驶人道路信息,驾驶人可以调整车速以最合适的车速通过交叉口。预警系统的布设在100 m处时,各个年龄段驾驶行为总体可靠度相对一致,驾驶人在看到预警系统后有充足的反应时间,并做出正确的操作行为,保证安全地通过交叉口。
2) 预警系统布设在100 m处情况下,驾驶行为总体可靠度随年龄的增长呈下降趋势,说明随着年龄的增长,驾驶人的感知判断能力、操作能力等都有所下降,影响到驾驶行为可靠度。女性驾驶人可靠度要高于男性,说明在注意到预警系统后,女性驾驶人提前采取系列措施进行安全驾驶。
3) 通过Kendall相关性分析发现,加速行为可靠度和速度可靠度与驾驶行为总体可靠度具有显著相关性,说明油门踏板开合度以及驾驶人对于速度的控制对驾驶行为总体可靠度有较大影响。
