基于实时动态载波相位差分的无人机起降引导系统研制*
2023-10-30张发兴王大千
张发兴,王大千,员 航
(1.陕西凌云电器集团有限公司卫星导航研究所,陕西 宝鸡 721000;2.中国航空工业成都飞机设计研究所,四川 成都 610091;3.中国航空工业西安飞行自动控制研究所,陕西 西安 710076)
0 引言
无人机在各领域的应用越来越广泛,在无人机自主起降的过程中,精确、安全起降至关重要[1].中程固定翼无人机采用轮式起落架滑跑起降方式[2],必须在与空气的相对滑行中获取升力,调整姿态,起降过程中需要较长的滑行道,要求定位精度在2 m范围内[3-5].现有进近着陆导航设备主要包括仪表着陆系统(ILS)、微波着陆系统(MLS)、精密进场雷达.ILS系统在军民航应用最广泛,其缺点是对起降场地要求严格,着陆引导体制与技术落后,着陆引导精度较低,不能满足中程固定翼无人机的定位精度要求.MLS系统性能优于ILS系统,但其设备庞大、费用昂贵[6],很多机场并未安装,应用受到限制.精密进场雷达的缺点是雷达信号覆盖范围有限,设备功耗较高,且只能用于下滑道着陆引导,不具备定位导航功能[7].ILS系统、MLS系统、精密进场雷达不能满足中程固定翼无人机的起降需求.
基于全球卫星导航系统(GNSS)的实时动态载波相位差分(RTK)定位[8]是一种使用卫星信号载波相位观测值的实时动态定位技术.RTK技术采用了差分定位的原理.通过架设基准站并将基准站坐标进行精确标定,基准站对可视空域内的卫星进行稳定跟踪,生成卫星信号定位误差修正值,通过无线链路将定位误差修正值进行实时播发.当流动站处于基准站无线链路信号覆盖范围内时,流动站接收基准站播发的定位误差修正值与流动站数据进行差分解算获得流动站的精确坐标[9].RTK技术进行差分解算时可以有效抵消卫星钟差、星历误差、电离层延时、对流层延时、接收机钟差,获得与固定基准站之间厘米级精度的相对定位基线[10-12].
针对中程固定翼无人机高精度起降的问题,基于北斗卫星导航系统(BDS)B1、B3双频RTK技术,设计研制了一种无人机起降引导系统,实现了BDSB1、B3双频RTK厘米级定位.并通过静态零基线试验、飞行试验验证了系统的定位精度和有效性.
1 基于RTK的起降系统总体架构
中程固定翼无人机的着陆过程可以分为4个阶段,包括进场平飞段、直线下滑段、拉平段和地面滑跑段[13],其过程示意图如图1所示.在无人机的起降过程中,RTK起降引导系统提供高精度的定位导航数据.

图1 无人机着陆过程
RTK起降引导系统的应用场景如图2所示.空间段GNSS卫星发射导航信号.地面站子系统持续接收、跟踪卫星信号,生成、播发误差修正值.机载端子系统接收、跟踪卫星信号,生成机载端观测值数据,同时接收基准站的误差修正值进行差分解算,获得高精度的相对定位基线值.

图2 RTK系统应用场景
基于RTK的无人机起降引导系统由地面站子系统和机载子系统组成[14-17],系统组成如图3所示.

图3 RTK系统组成
地面站子系统包括4个基准站接收机、4个导航天线、1部地空甚高频数据广播(VDB)发信设备和发射天线、1套差分定位设备、1部时统设备.
机载子系统包括1个差分定位接收机、1部卫星导航天线、1部地空甚高频数据广播(VDB)收信设备和接收天线.机载子系统实时解算以基准站为原点的坐标系下的无人机东向、北向、天向坐标,东向、北向、天向速度,UTC时间等导航参数.然后计算出无人机与基准站之间的厘米级相对定位矢量基线(包括东向距离、北向距离、天向距离),引导无人机起降.
2 起降系统设计
基于RTK的无人机起降系统由地面站子系统和机载子系统组成,各自的关键设计要素如下.
2.1 地面站子系统
地面站子系统功能为:时间同步、卫星信号跟踪与观测值采集、差分修正值生成与播发、差分定位检测.地面站子系统组成[18]如图4所示.

图4 地面站子系统组成
时统设备统一提供地面站子系统中设备的同步时钟.时间同步的设备包括:4个基准站接收机、差分定位设备、VDB发射电台.
卫星信号跟踪与观测值采集是由基准站接收机采用低动态高精度环路处理算法实现,对信号进行放大、滤波、下变频、模数转换、捕获、跟踪、解扩、解调、译码等处理,获得伪距观测值、载波相位观测值以及卫星导航电文等信息.
差分修正值生成与播发设备将GNSS观测值、差分修正值、卫星星历以及下滑道信息等,按照误差修正值报文、地面站数据报文和原始载波相位观测值报文ICD要求进行编码,送VDB发射电台进行播发.地面站子系统信号处理流程如图5所示.
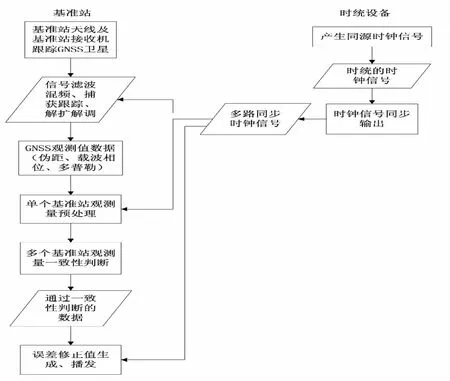
图5 地面站子系统数据处理流程
差分定位检测对空间段卫星信号、地面站子系统的VDB发射电台进行异常监测,保证差分系统的可靠、安全.差分定位检测设备的主要作用有两个:一是可以实时接收地面站播发的差分报文,检测报文通信是否正常;二是可以通过差分运算检测地面站播发的差分修正值是否正确.
2.2 机载子系统
机载子系统主要用于机载端卫星信号跟踪与观测值采集、接收地面站子系统的差分校正量数据,同时完成机载端的差分校正功能以及计算保护级水平.机载子系统组成如图6所示.
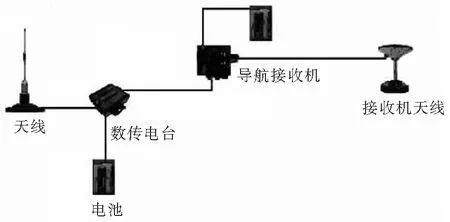
图6 机载子系统组成
卫星信号跟踪与观测值采集功能是机载接收机采用高动态环路处理算法对GNSS卫星信号进行稳定跟踪,对信号进行放大、滤波、下变频、模数转换、捕获、跟踪、解扩、解调、译码等处理,获得伪距观测值、载波相位观测值以及卫星导航电文等信息送差分定位处理.
差分修正值接收功能是通过机载子系统VDB电台接收解析码伪距差分修正值报文、地面站数据报文、下滑道数据报文和原始载波相位观测值报文送差分定位处理.
差分定位处理是利用差分修正值和机载接收机采样的观测值数据,同时完成载波相位平滑码伪距,RTK差分定位解算及误差估计;使用地面站参数对水平保护级和垂直保护级进行计算,实时检测保护级是否超出告警门限,并给出告警信息.机载子系统数据处理流程如图7所示.

图7 机载子系统数据处理流程
机载子系统差分接收机的功能特性如下.
1.BDSB1、B3双频信号跟踪;
2.每个频点通道数≥12;
3.支持实时动态码相位差分技术(RTD);
4.支持RTK定位;
5.采用载波相位技术;
6.能够输出自定义报文,进行数据提取与传输,同时便于与其他设备交联;
7.RTK定位数据更新率10 Hz.
3 系统算法
k历元时刻基准站接收机与流动站接收机共视观测到n+1 颗卫星,以仰角最高的1号卫星作为参考卫星,形成n个相互独立的双差载波相位观测方程如式(1).
(1)
式(1)简写为:
yk=Akb+N+εk.
(2)
式中:k是历元时刻;yk是双差载波相位观测向量;Ak是几何矩阵;b是流动站指向基准站的基线向量;N是整周模糊度;εk是噪声误差.
经过m个观测历元,根据式(1)、(2)可以得到下列双差观测方程:
(3)
式中,I是单位矩阵,式(3)可简化为:
y=Ab+BN+ε.
(4)
式中:A、B是系数矩阵;b是流动站指向基准站的基线向量;N是整周模糊度.b、N是待求解未知量.运用最小二乘估计准则对b、N进行估计,以最小目标函数进行计算:
(5)
其中Zn与R3分别是n维整数空间以及3维实数空间.由式(5)得到基线向量b的解如下:
(6)
式(6)转换后如下:
(7)
由式(7)计算b、N以及各自的协方差矩阵如下:
(8)
(9)

(10)
(11)
式(6)与式(10)基线向量解之间的关系如下:
(12)
(13)
计算候选整周模糊度的方差,对方差从小到大排序,以最小、次小的两个方差之比作为判据值Rthres,即
(14)
式中:s0、s1分别为最小、次小的方差.当Rthres值≥3.5,判整周模糊度固定成功.最后使用整周模糊度对流动站坐标进行修正(定位收敛为Fix状态).
4 试验验证
采用静态零基线、飞行试验两种方法对RTK系统进行测试验证.
零基线方法本质是基于双差模型的误差处理方法,消除了一系列相关误差.卫星端消除了卫星钟差、星历误差、相对论效应.传输路径消除了电离层误差、对流层误差、多路径误差.接收机端消除了接收机钟差.
静态零基线方法是衡量RTK定位精度以及观测量精度的重要方法.架设1台卫星导航天线接收GNSS卫星信号.在卫星导航天线射频输出口接功率分配器,将相同的卫星信号分两路输出,两路卫星信号的信号强度、相位完全相同.1路信号接基准站接收机,另外1路接流动站差分接收机.零基线测试方法原理图见图8.静态零基线设备架设图见图9.因为基准站和流动站接同一个天线,基线长度理论值为0.以理论基线长度0为对比基准.RTK系统在零基线条件下的定位基线长度值就是RTK系统的定位误差.

图8 零基线测试方法原理图 图9 静态零基线设备架设图
零基线条件下,RTK系统对天实收GNSS卫星信号,以10 Hz频率进行采样.流动站定位收敛为Fix状态后,统计试验数据东向(East)、北向(North)、天向(Up)基线长度数据实测结果如图10所示.定位误差如表1所示.

表1 定位误差
图10、表1数据表明,静态零基线时RTK系统的实测定位精度水平方向在5 mm以内波动,高程方向在8 mm以内波动.
飞行测试在某型中程固定翼无人机上进行试验.精度考核基准以机上惯性导航设备与NovAtel DGPS设备Fix状态定位结果融合的数据为准.
基准站架设在机场附件坐标精确标定过的点位(基准站距离跑道起飞点直线距离约1 km),基准站生成的误差修正值通过地面VDB发射电台以无线链路的方式播发.流动站及VDB接收电台均安装在无人机上,VDB接收电台接收、解码差分修正值并输出到流动站接收机.无人机从跑道起飞点滑行起飞,以由近及远的路线进行飞行试验,飞行的基线距离范围是1~30 km.图11所示为飞行测试环境.

图11 飞行实验图 图12 定位误差
差分系统随无人机开展了超20架次飞行测试,工作状态稳定可靠.飞行试验前测量出无人机与基准站的直线距离为1.372 km,无人机以约30~80 km/h的速度滑行,飞行最大速度为300 m/s,单次飞行任务时长约5 h.对全部飞行数据进行分析,按照基线在1~12 km(覆盖起降区域)范围内,定位收敛为Fix状态(Rthres值≥3.5),定位精度因子(PDOP)小于等于3.5,差分共视卫星个数≥6颗统计试验数据.将差分定位结果与考核基准进行对比,统计定位精度.机载流动站在东向(East)、北向(North)、天向(Up)的定位误差实测数据如图12所示.误差统计如表2所示.

表2 定位误差
图12、表2数据表明,飞行试验时RTK系统的实测定位精度水平方向在3 cm以内波动,高程方向在5 cm以内波动.
5 结论
针对中程固定翼无人机的起降需求,设计了固定基准站无人机厘米级高精度起降引导系统,具有一定的工程应用价值.
1)基于GNSS载波相位观测量、设计了双差载波相位模型、以最小二乘估计准则构造了最小目标函数进行b、N值的整数解估计、完成差分RTK解算.
2)通过静态零基线试验、无人机飞行试验表明,RTK起降引导系统相对定位精度水平方向≤0.03 m(1σ),高程方向≤0.05 m(1σ),系统达到了厘米级定位精度.满足中程固定翼无人机在起降阶段对定位精度的要求.
RTK起降系统的可用性、完好性检测、多频卫星信号的周跳探测与修复以及GNSS与惯性导航传感器的数据融合技术是进一步研究的方向.