压力式验潮仪在航道水深测量中的运用
2023-10-30曹清明
曹清明
(安徽省交通勘察设计院有限公司,安徽 合肥 230011)
现阶段潮汐测量方法已经经过改进,常用于航道水深测量的验潮仪有浮子式验潮仪、声学式验潮仪以及压力式验潮仪3 种,前两种在应用时对测量环境要求较高,适合用于离岸较远的潮汐测量,一旦海面结冰,验潮仪将无法正常工作。而压力式验潮仪可以观测海水的压力变化情况,由此推断潮位实际变化,不仅成本小且无须打井,可完成近岸、远岸和深海验潮,使用性能更稳定可靠。
1 压力式验潮仪的测量原理
1.1 测量原理
基于水位和压力的变化之间呈比例的关系原理,使用压力式验潮仪测量水下某一位置压力值,计算海面起伏而引发的水深变化,以达到设备的验潮功能。将设备放置在海上某个验潮处的水下固定位置,根据提前设定的时间间隔观察测量验潮点区域的压力值,然后再减去同一时刻大气压值,得到水压值,验潮仪的测量工作原理如图1所示[1]。
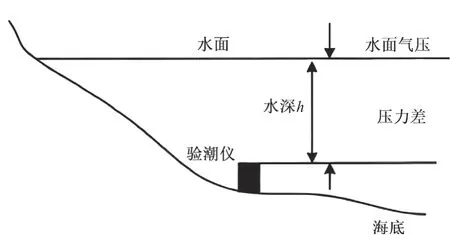
图1 压力验潮仪工作原理
基于水压值、海水密度值以及该处区域的重力加速度值的参数变化,得出压力式验潮仪水深值,其计算如公式(1)所示。
式中:h(t)为压力式验潮仪测量水深值;P1为测量到的压力值;P0为海面大气压值;ρ为当前海水密度,结合工程实际情况计算重力加速度,其计算如公式(2)所示。
式中:ϕ为压力式验潮仪在应用时所处位置的地理纬度。
TGR-2050 型压力式验潮仪设备可以用来观测与记录潮水变化,掌握海水温度变化,海面波浪不会给设备带来过于强烈的干扰影响,所以验潮仪具有较高的测量精度。2050 验潮仪根据压力传感器的测量方法,在测量某一时段平均压力后,计算设备零点处的水深,如公式(3)所示。
式中:P为水深压力 ;Pm为压力传感器测量压力 ;Patm为压力传感器产生压力。
压力P计算海面与验潮仪零点之间的深度,按照测区海水密度计算[2],如公式(4)所示。
式中:D为测量的深度,m;P为计算得到的压力,N;ρ为海水密度。
使用GPS 测定某个测量点的空间位置,再使用单波束与多波束回声探测仪测定水深,根据验潮仪测量记录的潮汛情况,得出潮位数据,经过修正后获得85 高程。使用三角分带解释法对潮位数据加以推算,一般会临时设置验潮站,观测7 天以上的验潮数据,计算平均海面和85 高程的关联,采集验潮站多年来平均海面和理论最低海面的关系,应用潮高差比法计算海面和深度基准面的差值,从而获得水下水深图。
1.2 测量过程
首先,分析测量区域,先在区域内选择3 个可以自动验潮的位置与水尺安置位置,保证验潮点可以代表该区域,并且反映海域内潮汐特征,要求将水尺安装在验潮点周围的近海岸区域,保证水尺所在位置和验潮仪位置的潮位一致。
其次,根据海域旁边的水准点资料进行水准联测分析,使验潮点周围能够至少有1 个工作水准点。安装验潮仪与水尺,每隔10min 记录潮位数据,启动验潮仪。一般情况下将压力式验潮仪安装在海面下15m 的位置,避免出现任何零点漂移的情况。
再次,测量水深后以及测量结束前,须同时利用水准点测量水深,可每隔10min 观测水尺读数,一般需要观测5~6 次,同时需要记录观测时间,计算各个时刻海面85 高程情况。水深测量结束后,导出验潮仪数据,根据同时刻水面85 高程与相应的验潮仪假设水面高程,计算12 各水面85 高程修正值,取均值后进行潮位改正。通过测量海水压力,将测量值换算后得到水深值,也就是水位值,计算如公式(5)所示。
式中:p为所测的绝对压力值和当前大气压的差值,Pa;g为测量点的重力加速度,m/s2;r为测量位置的水密度情况,kg/m³。
除此之外,波浪或暗涌起伏会对最终测量到的压力值产生影响,所以须对压力值进行滤波处理,采用数字滤波方法计算测量值的平均值。
最后,使用三角分带解释法计算海域中各个点的海水面85 高程数据,计算海底85 高程。水深测量期间,海域不同时波浪会对测量工作产生影响,应按照测区不同海域的波浪特点,使用消浪软件处理。采集到的测点平面位置与水深文件,需要将其编制为潮位改正计算格式文件[3]。
2 压力式验潮仪在航道水深测量中的误差问题
2.1 气压变化引发测量误差
以实际情况为例,在北纬30°,重力加速度值为9.8m/s²的情况下,海水密度计算值为1.02×103kg/m³,大气压变化为-50hPa~50hPa,按照上述公式进行计算,得知大气压变化对压力式验潮仪的观测产生的影响。经过研究发现,随着大气压升高,水深值将会变小;大气压下降,水深值会增加,可见大气压的变化对水深的影响呈现线性变化的趋势。
2.2 海水密度变化引发测量误差
经过研究得知,当水位观测误差处于±2cm 时,验潮仪在海面下的投放深度越浅,海水密度的变化对观测潮位的影响也就越小。使用底层海水密度计来计算潮位可有效降低海水密度带来的影响。
2.3 潮流对潮汐测量造成误差
由于该处位置潮差比较大且潮流存在一定的规律性,涨潮时,潮流方向通常是从下游到上游,退潮时潮流方向是从上游到下游,因此潮流的存在要求验潮仪必须有不同的安装方式,所造成的测量误差一般会有以下2 种情况:1)验潮仪安装在锚链中,导致零点漂移误差出现。零点漂移具体指放大电路在没有输入信号时,用灵敏的直流表测量输出端,也会产生变化缓慢的输出电压。2)验潮仪垂直安装于固定桩柱中。使用3 台压力式验潮仪进行试验,先将2 台设备固定于水尺底部,再将1 台压力感应孔区同样固定于水尺底部,要求采用水平固定的方式。第三台验潮仪须放置在空气内,用来测量大气压扰动情况,3 台设备的设计参数是相同的,基于大气压下形成的压力常数为101.325kPa,将取样周期设置成10min,设备启用的间隔为40s,测定潮位时,将密度设置为1.011g/mm³,大潮时需要连续4 天测定数据,同时安排工作人员从每天上午08:00—18:00,每隔30min 观测一次数据。
2.4 验潮仪压力感应零点漂移引发测量误差
验潮仪压力感应零点漂移会导致压力误差,从而影响潮位测量精度。如果零点漂移过大,那么潮位测量数据将难以达到精度要求。为解决这一难题,采用简化后的测量方式,将密度设置成1.0g/mm³,使验潮仪以水平的方式固定于水中,持续观测24h,经过大气扰动改正后,分析其曲线是否处于同一直线,判断仪器运行的稳定性,最后取潮位观测平均值即可,再利用验潮仪压力感应孔道水面的水质,判断当前是否出现了零点漂移的情况[5]。
3 解决压力式验潮仪在航道水深测量中误差问题
3.1 解决气压变化测量误差问题
因为压力式验潮仪无法确定水深是否与大气压变化或潮汐变化有关,为测量得到水深值,须根据大气压变化情况进行修正,尽可能地降低这方面对验潮仪的影响。该项目中分别在验潮点周围200m 的海面上安装验潮仪,观测该处大气压的变化情况,减少大气压变化给验潮仪工作带来的不良影响,其中的一部分验潮数据见表1。
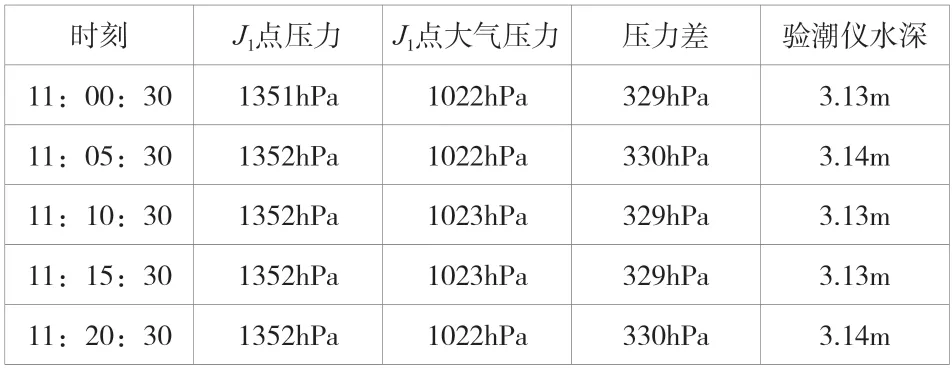
表1 项目中部分验潮数据
根据表1 中的验潮数据可知,大气压变化1hPa 都会导致设备观测值出现约1cm 的变化[4]。
整个装置长度检定与压力检定2 个部分,在0~8m 在水塔内完成长度检定,超过8m 后,装置会以数字精密压力表,联合压力容器与压力源一同进行压力检定,防止压力变化测量出现误差问题,保证验潮数据完整。
3.2 解决海水密度变化测量误差问题
为修正误差创造有利条件。在该项目中,不同的验潮仪抛投深度会使用不一样的密度计,所计算的水位数据如下:当抛投深度为4.3m 时,海水密度为1.030t·m-3;当抛投深度为4.0m 时,海水密度为1.030t·m-3;当抛投深度为23.5m 时,海水密度为1.025t·m-3。为保障游轮能够进出港航行安全,在通航水域试投产前进行复测扫海,保障通海安全,为后续航道水域清淤维护奠定基础。整个项目航道设计总长度38km,底高程-22.8m,包括3 个部分,外航道长度26.2km,宽度320m,方位角为104°~284°。项目内一共建立3 个验潮站,以便对潮位进行分段研究。压力式验潮仪能够以高分辨率观测水下压力值变化情况,但是设置的采样参数固定,不会因为外界的环境改变而产生变化。因此,压力式验潮仪无法确定压力值变化带来的影响,须进一步分析误差值的来源。
3.3 解决潮流对潮汐测量误差问题
将验潮仪固定在锚链上,同时与水底的距离为3m,无论是涨潮还是落潮,验潮仪的零点距离水底的距离都是d,当和垂直方向的偏移角度逐渐变大且偏移角为5°时,零点变化是1cm;当偏移角为15°时,零点变化是10.2cm,所以压力式验潮仪是无法固定在特殊状态下的锚链上的,例如受到潮流严重影响的锚链。
大气扰动改正后,提取人工观测数据,将验潮仪和人工观测的数据进行对比发现,水平安装的设备观测数据比垂直安装的数据更接近于人工观测结果,差值可以保持在0~2cm。采用压力式验潮仪可减少动压强与涡流对潮位测量的影响,所以需要将设备安置在水下且压力感应面需要与水面之间保持平行。
3.4 解决验潮仪压力感应零点漂移问题
3.4.1 数据记录
在航道水深测量过程中,零点漂移属于一种不可控影响因素,一般会根据验潮仪移动、沉降以及飘动等一系列变化来记录零点的大致突变情况。在整个校核过程中,需要提前对潮位资料进行整理。首先,需要提前换算潮位基准面。在水深测量过程中的观测潮位根据考证之后的基面关系,使其被转为85 高程下的基准潮位,再检查绘制的同步潮位过程线图,修正因风浪导致的跳点,最大程度地保证观测点的潮位计算正确。其次,科学编制潮位观测表,获取深度探测中的潮位情况,再将国家规定的高程基准潮位编制为相应的格式文件,得到深度数据[6]。
受自身原因与外部环境等因素的影响,验潮仪在工作期间难免会遇到零点漂移的情况,投放验潮仪之前需要将几个验潮仪放在室内同等高度悬挂,以相同的参数设置方式,要求数据采集频率保持在1 次/min,观测时间应超过24h,采集数据之后再导出每个验潮仪记录的数据,提出测量之前和之后半小时的数据,计算在统一时间段中各个设备的大气压均值。
3.4.2 同步验潮法
采用同步验潮法高程传递需要满足一定的前提,即假定同一时间段内的相应范围内的海域海水面相同。项目所处的海域为半日潮,根据相应规范要求得知,要求半日潮的潮汐高程传递的同步验潮时间达到3 天,高差最大差值2cm,在满足以上条件后才能达到规范要求。为确定验潮站的实际潮位,对2 个不同的验潮站进行3 天的同步验潮分析,按照上述公式计算验潮仪的水深值,再将得到的结果与人工水尺读数相比,为保证设备验证的数据可靠,人工水尺读数和验潮仪数据的校验时间不能小于2h,同时采样间隔时间应保持约10min。基于平均海水面相同的原则,计算2 个验潮站的水深值、平均值和差值,完成数据修正,使其达到理论最低潮面,得出潮位情况[7]。
经过研究可知,使用压力式验潮仪能够最大程度地降低人为操作压力,节约人力与物力成本,提高工作效率。如果需要更精准的验潮数据,就需要提高对环境变化的关注度,特别是大气压与海水密度对验潮数据的影响,与此同时,应重视验潮仪的零点漂移问题。经研究发现,大气压变化对验潮数据产生的影响主要呈现线性变化特征,当大气压变化1hPa 时,验潮数据就会变化约1cm,此时应采用同步观测大气压的方式,减少影响。随着验潮仪抛掷的深度增加,海水密度变化造成的误差使设备误差变大,所以要尽可能地减少验潮仪抛设深度,验潮前在空气内对同一个地点的多个设备进行同步观测,以大气压均值作为标准值,科学计算其他压力式验潮仪的实际零点漂移校正值。对沿岸水位站不能控制水位的测量情况,在同一时间段的相应范围海域内,使用压力式验潮仪可以根据相同的原理有效传递高程信息[8]。
4 结语
该文以压力式验潮仪的航道内水深测量作为研究重点,针对压力式验潮仪的测量原理与测量过程,基于工程实际情况掌握压力式验潮仪观测值的误差来源。分析大气压、海水密度等影响因素带来的观测值误差变化,提出有效的误差修正方法,从而提高验潮仪在航道水深测量的应用优势。
