水轮发电机组碰摩转子系统模型的周期解及数值分析
2023-10-30刁洋洋
刁洋洋
(山东华邦建设集团有限公司,山东 潍坊 262500)
水轮发电机组的转子和定子之间具有一定的轴径间隙,受振荡作用的影响,转子在水平方向存在小幅度的偏移风险,进而导致定子和转子间出现碰摩,探索碰摩转子系统的周期解能够建立科学的运动控制参数、降低碰摩对转子和定子的破坏程度。由于运动过程属于强非线性微分方程,难以直接求解,因此运用数值分析法进行迭代计算。
1 水轮发电机组碰摩转子系统模型及运动方程
1.1 转子-轴承模型
在直角坐标系o-xyz中,水轮发电机组的定子和转子运动系统如图1所示,其中椭圆实线部分为发电机定子,椭圆虚线部分表示发电机转子,定子和转子的几何中心为o点,轴径的初始中心为s点。当系统处于静止状态时,o点和s点重合;当系统处于运动状态时,受振动效应的影响,o点和s点有可能出现位置偏移。A点和B点分别为上导轴承、下导轴承的几何中心,ω为大轴转速。将转子的重心记为G,转子的质量偏心可为向量e0,大轴的旋转偏心可为向量e。
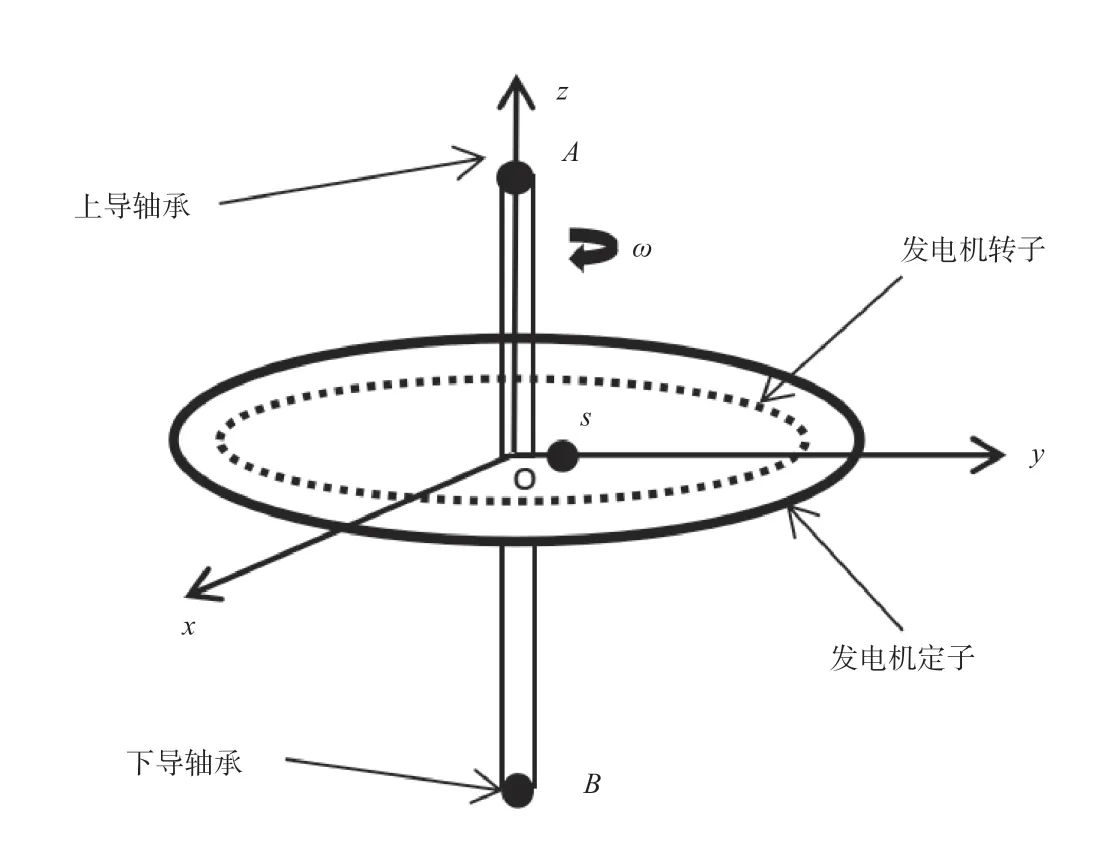
图1 水轮发电机转子-轴承系统示意图
1.2 建立运动微分方程
1.2.1 模型基本假设
将发电机转子简化成质量为m1的圆盘结构,转子的支撑结构为可滑动的轴承,该轴承为均匀的对称结构,其上、下端质量均为m2。转子位于上、下导轴承的中点,以线性方式处理轴承的阻尼和刚度。转子的振动效应较复杂,存在多个方向的分量,该模型仅考虑横向振动,不考虑陀螺力矩和扭转效应的影响。
1.2.2 转子-轴承碰摩运动微分方程
在仅考虑横向振动的情况下,转子在水平方向会产生一定的振动幅值,转子和定子之间存在特定的距离,当转子的水平运动幅值超过该距离时,转子和定子就会产生碰摩作用。从理论上讲,碰摩过程必然会引发热效应,并且定子会发生不可预知的形变[1]。为了便于建立运动微分方程,可将定子形变视为线性形变,同时不考虑碰摩产生的热效应。综合以上假设条件,定子和转子之间的摩擦力符合库仑摩擦力(见表1)的应用条件。转子处于运动状态,当产生碰摩作用时,以滑动摩擦力为主,将摩擦力分解至x轴和y轴,分解后的摩擦力如公式(1)所示。

表1 库仑摩擦力的基本观点
式中:Fx_rub、Fy_rub为撞摩擦力在x、y轴的分量;e1为发电机转子的径向位移;f为摩擦力系数;kr为定子径向刚度;δ0为定子和转子的平均气隙长度;H为函数。
H函数式如公式(2)所示。
根据现有研究成果,水轮机转子-轴承系统在运行过程中主要存在3 种作用力,分别为不平衡磁拉力(Unbalanced Magnetic Pull,UMP)、碰摩力和非线性油膜力。将轴承径处的坐标记为(Z,W),则定子-转子系统的运动微分方程组如公式(3)所示。
式中:m1为电机转子圆盘的质量;m2为轴承上端或者下端所集中的质量;转子质量偏心为e0;c1为转子处的阻尼;c2为轴承处的阻尼;Fx_ump、Fy_ump是不平衡磁拉力在x轴、y轴方向的分量;Ke为大轴的刚度;fx、fy为非线性油膜力在x轴、y轴的分量;将转子外圆几何中心的坐标记为(X,Y,0);X''、X'分别为对坐标的二阶微分、一阶微分;Y''、Y'、Z''、Z'、W''、W'的含义与X''、X'类似。
2 碰摩转子系统模型的周期解及数值分析
2.1 周期解的近似表达式
2.1.1 运动微分方程的解析方法
谐波平衡法(Harmonic Balance,HB)是处理非线性问题的常用方法,但公式(3)属于强非线性微分方程,HB 方法难以对该方程进行解析[2]。隐式谐波平衡法(HB-AFT)由HB 方法和时域频域转换技术(Alternating Frequency/time,AFT)综合发展而来,能够解析强非线性微分方程,其原理如下。
假设存在某个非线性系统,其二阶微分方程如公式(4)所示。
为了得到公式(4)的周期解,假设x与t的关系式为x(t),并且x(t)为周期性函数,其周期为T,于是有x(t)=x(t+T)。此时函数f(·)与x(t)建立了相同的正交基,可分别对其实施傅里叶展开,进而获得二者的隐式非线性代数关系式。
2.1.2 周期解近似表达式的推导过程
根据HB-AFT 方法的应用原理,应该先对公式(3)进行非线性函数谐波平衡化,再从中获取主方程,具体过程如下:对方程在X、Y、Z、W这4 个坐标点的周期解实施傅里叶展开,得到相应的傅里叶级数形式和线性外力的傅里叶级数[3]。例如非线性外力如公式(5)所示。式中:cx0、cy0、cz0以及cw0均为常数;cxk、cyk、czk以及cwk为余弦项相关的系数;dxk、dzk、dwk以及dyk为正弦项相关系数。
将经过傅里叶展开的周期解和非线性外力代入公式(3)中,即可推导出有关常数项的代数方程,将该方程记为G。将X、Y、Z、W方向的周期解经过傅里叶展开后同样可得到常数项ax0、ay0、az0、aw0,相应的余弦项系数为awk、azk、ayk、axk,相应的正弦项系数包括bwk、bzk、byk以及bxk。
难以直接对隐式非线性方程G进行求解,于是利用牛顿迭代法来求解,其实施步骤包括确定需要迭代的变量、构造迭代关系式以及控制迭代过程[4]。利用X、Y、Z、W方向周期解傅里叶展开级数中的常数项、余弦系数项、正弦系数项,构造出迭代关系式P,则有P=[ax0ay0az0aw0ax1ay1az1aw1bx1by1bz1bw1...axkaykazkawkbxkbykbzkbwk]。再将非线性外力经过傅里叶展开所形成的常数项、正弦系数项、余弦系数项构建立为迭代式Q,则有Q=[cx0cy0cz0c w0cx1cy1cz1cw1dx1dy1dz1dw1...cxkcykczkcwkdxkdykdzkdwk]。在求周期解的过程中,将迭代关系式Q作为已知因素,P为求解目标,以不动点迭代法求解P,但计算过程涉及大量数学推导且较抽象,难以直观展示,下文将通过数值分析展示求解过程。
2.2 数值分析
以某型水轮发电机为数值分析对象,其对应的m1、m2质量分别为60kg、25kg,转子阻尼和轴承阻尼分别为c1=4000N·s/m、c2=1200N·s/m,转子和轴承的半径分别为Rr=0.06m、Rb=0.5m,将转子和轴承的对应长度记为Lr和Lb,取值分别是0.15m、0.3m。定子和转子的平均气隙长度为δ0=0.0045m,转子的质量偏心e0=0.0006m。励磁电流Ij=4A,碰摩擦系数f取0.01。将空气的磁导系数记为μ0,取值为4π×10-7H/m,µ为润滑油绝对黏度,取值为1.8×103Pa·s。
2.2.1 周期1的近似解
2.2.1.1 设置对照求解方法
为了评价HB-AFT 方法在碰摩转子系统周期解数值分析中的效果,将Runge-Kutta 方法作为对照组。Runge-Kutta方法是一种隐式或显式迭代法,在非线性微分方程的求解中具有重要应用,其优点为求解精度高,缺点为实现原理较复杂,不易操作[5]。
2.2.1.2 数值分析结果
数值分析结果具体如下。
首先,周期解的求解结果。水轮机大轴转速ω取值为13rad/s,轴径间隙设置为0.0002m,时域离散点的数量设置为144 个,迭代精度设定为1×10-11,谐波次数设置为8。根据隐式谐波平衡法的实施原理,通过MATLAB 软件求解出水轮机碰摩转子系统周期1 的近似解析表达式,将X方向的周期解记为X(t),Y方向的周期解记为Y(t),结果如下。
X(t)=-1.6432231×10-11+6.13443091×10-3sin(ωt)-1.1020326×10-11cos(2ωt)+1.61331×10-11cos(3ωt)+1.12521×10-10sin(3ωt);Y(t)=0+6.1343138×10-4cos(ωt)+1.10925×10-10cos(3ωt)。
其次,求解方法性能评价。HB-AFT 求解法和Runge-Kutta 求解法在相同条件下得到的数值解如图2(a)所示,二者的数据高度吻合,说明求解结果具有良好的可信度。上述2 种方法求解的转子X方向时域图如图2(b)所示,其中τ为周期数。Runge-Kutta 法于大约第260 个周期达到稳态解,所用时间约为17.42s。与Runge-Kutta 法相比,HB-AFT 法更早达到稳态,所用时间约为7.72s。可见,HBAFT 法不仅具有较高的精确度,还能有效缩短求解时间。

图2 HB-AFT 求解法与Runge-Kutta 求解法性能对比
2.2.2 周期运动的稳定性分析
2.2.2.1 改变轴径间隙的周期解
在周期1 的运动分析中,将轴径间隙设置为0.0002m,为了进一步验证周期运行是否具有稳定规律,将轴径间隙扩大至0.0014m,其他模拟条件保持不变。同样利用HBAFT 法和Runge-Kutta 法进行迭代计算。HB-AFT 法在新条件下的X方向和Y方向周期解X1(t)和Y1(t)如下。
X1(t)=3.2755×10-8+2.82821×10-8cos(0.25ωt)-2.6488×10-1sin(0.25ωt)-2.4338×10-8cos(0.5ωt)-4.490×10-8sin(0.5ωt)-1.2406×10-8cos(0.75ωt)-1.6481×10-8sin(0.75ωt)-1.7878×10-7cos(ωt)。
Y1(t)=0+2.6144×10-1cos(0.25ωt)-2.8433×10-8sin(0.25ωt)+3.1124×10-8sin(0.5ωt)-1.2481×10-8cos(0.75ωt)+1.7214×10-8sin(0.75ωt)+1.7654×10-7sin(ωt)。
2.2.2.2 稳定性分析
Floquet 理论可用于分析周期运动的稳定性,通过特征乘子判断运动过程是否稳定。如果最大特征乘子小于1,表明周期运动是稳定的;当最大特征乘子大于1 时,表明周期运动不稳定(出现分叉);如果最大特征乘子等于1,说明周期运动处于临界稳定状态[6]。设置不同的轴径间隙,计算最大Floquet 乘子,结果见表2。从表2 可知,当可调参数轴径间隙为0.0001m、0.0002m、0.0009m 和0.0014m时,系统呈现出稳定的周期运动,其他轴径间隙均出现了分叉。
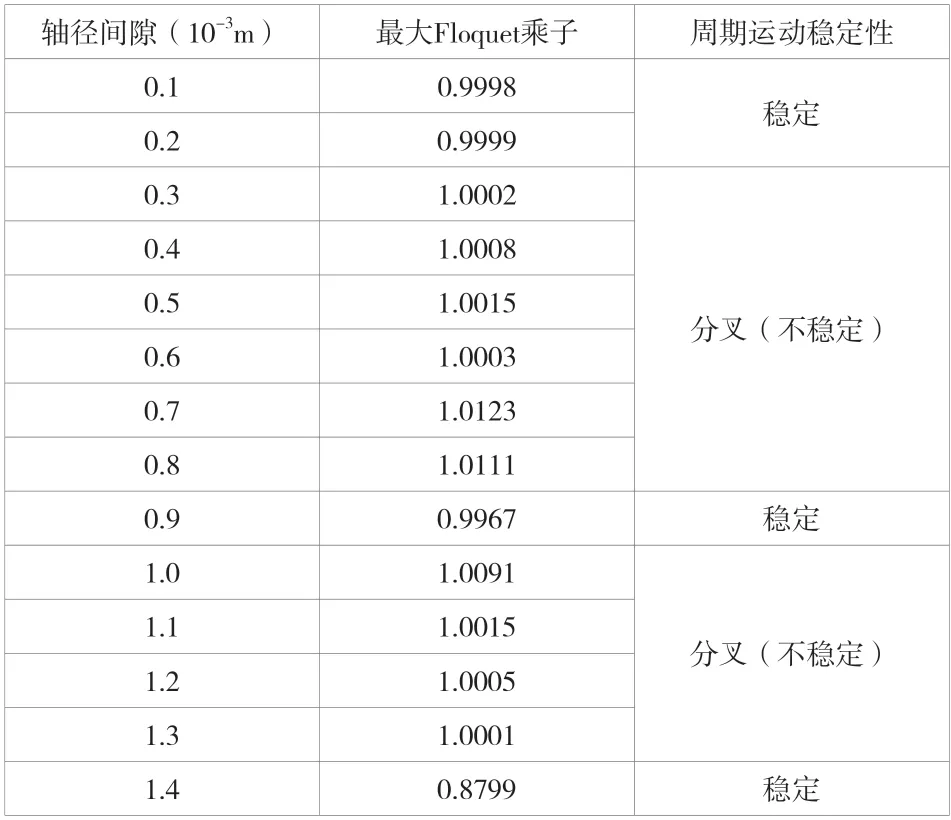
表2 不同轴径间隙对应的最大Floquet 乘子及周期运动稳定性结果
3 结语
对以上研究内容进行总结,得到以下3 个结论:第一,通过HB-AFT 法对碰摩转子系统的运动方程进行迭代结算,可有效求出X方向和Y方向的周期解。第二,与Runge-Kutta 法相比,HB-AFT 法均能达到基本相同的计算精度,计算耗时也有明显降低。第三,当轴径间隙为0.0001m~0.0014m 时,仅有0.0001m、0.0002m、0.0009m、0.0014m 共4 种取值能够使碰摩转子系统达到稳定运行状态。
