一种机载近程无线电导航设备标准模拟器的设计研究
2023-10-30许海
许海
(国营芜湖机械厂,安徽 芜湖 241007)
1 前言
某型机载近程无线电导航设备(塔康)标准模拟器(以下简称模拟器)是一个校准测试仪器,可用来检侧和维修塔康和精密测距(DME/P)设备,它能提供模拟的距离、方位和识别信号。在空/地X 或Y 模式下,这些信号与塔康地面台的信号相同;它也能模拟出塔康在空/空X 或Y 模式下距离和方位信号;在DME/P 状态下,可分别模拟出X、Y、Z、W 等模式的距离信号。主要用途如下:(1)检测塔康的距离精度和在不同速率下的搜索和跟踪能力。(2)检测塔康的方位精度和在不同速率下的搜索和跟踪能力。(3)检测机载DME/P 设备的距离精度和搜索、跟踪能力。(4)测试塔康和DME/P设备的识别电路工作情况。(5)检测塔康、DME/P 设备接收灵敏度、选择性和邻波道抑制性能。(6)测量塔康、DME/P 设备发射机的峰值功率。
2 设备组成
模拟器由射频部分、视频部分和电源组成。其中视频部分包括距离单元、方位单元、波形单元和PC104 单元;射频部分包括调制组件、频率合成器、程控衰减器、定向耦合器、环流器、检波稳幅组件和低通滤波器,原理框图如图1。
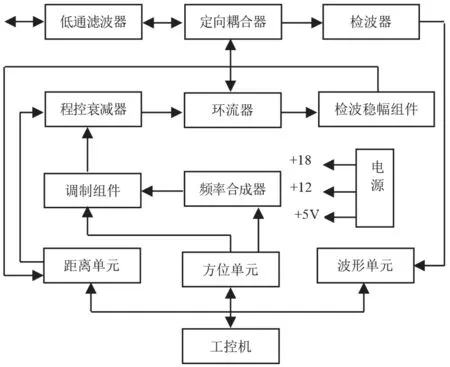
图1 模拟器原理框图
模拟器是一个校准测试仪器,可用来检测和维修塔康和DME/P设备,它能提供模拟的距离、方位和识别信号。在空/地X 或Y 模式下,这些信号与塔康地面台的信号相同;它也能模拟出塔康在空/空X 或Y 模式下的距离和方位信号;在DME/P 状态下,可分别模拟出X、Y、Z、W 等模式的距离信号。
3 射频部分
射频部分产生252 个波道的RF 信号,与塔康系统中126 个空/地(X 或Y)波道、126 个空/空(X 或Y)波道、DME/P 系统中200 个(X、Y、Z、W)波道相对应。波道以1MHz 为间隔,范围从962 ~1213MHz,其每一波道控制在±0.002%范围内。工作频率(波道选择)可由前面板控制键选择,且可程控响应选定的工作模式。
在RF 系统中,从视频系统来的一个混合调制信号加到调制器,用来调制RF 信号的电平,此电平从~-127dBm,通过程控衰减器使其以1.0dB 的增量变化,提供一个检测信号送给被检设备。RF 系统也接收从被检测设备来的距离询问脉冲,询问脉冲在检波后加到视频系统来激发一距离回答脉冲。距离回答脉冲也被送到脉冲峰值测量电路,以确定被检测设备发射机的输出功率。RF 系统方框图见图2。
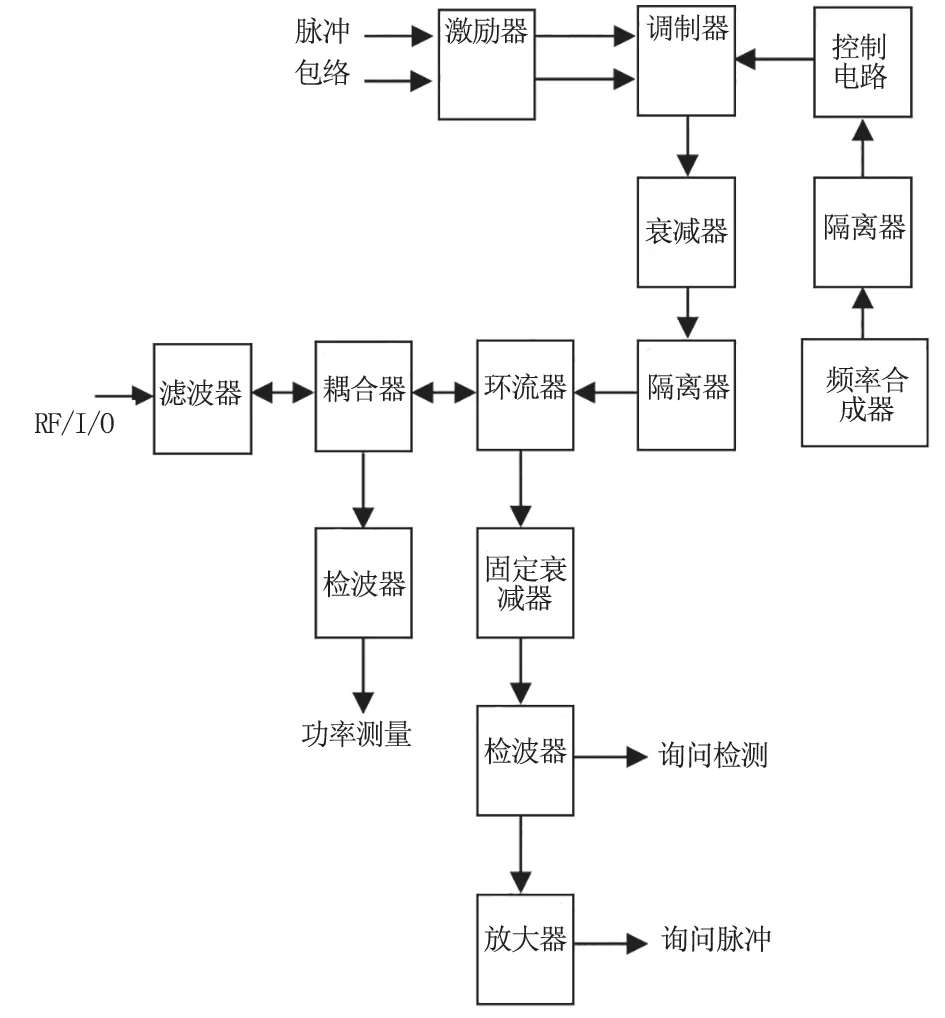
图2 RF 系统方框图
频率合成器提供RF 载波经隔离器隔离馈给载波控制电路,其输出频率由视频处理系统的波道控制决定。频率范围为962 ~1213MHz,波道间隔1MHz。由视频处理系统来的控制信号对载波进行控制,当有脉冲时打开载波信号将载波馈给PIN 调制器。调制激励器将来自视频的脉冲信号和15Hz、135Hz 复合包络电压信号转换成电流激励信号,馈给PIN 调制器。经脉冲调制、复合包络调制后的输出RF 信号馈给程控衰减器,程控衰减器的衰减范围为0 ~127dB,其输出再经隔离器、环流器、定向耦合器、低通滤波器由RF 输入/输出接口输出。
由塔康和DME/P 发射的RF 测距询问脉冲,经输入/输出接口低通滤波器、定向耦合器、环流器馈给30dB 固定衰减器。衰减后的RF 询问信号经稳幅、检波、放大,一路询问脉冲输出给前面板上的询问监测口,另一路询问脉冲输出给视频分机。
由塔康和DME/P 发射的RF 测距询问脉冲在通过定向耦合器时,耦合一部分信号给同轴检波器,经检波器检波输出询问脉冲给视频的功率测量电路,测量塔康和DME/P 的发射功率。
4 视频部分
视频系统产生一个混合调制信号,可提供塔康空/地X、Y 模式下的距离、方位和识别信号,提供塔康空/空X 和Y 模式下的距离信号,还提供DME/P 状态X、Y、Z、W 模式下的IA 和FA 模式距离信息。视频系统方框图见图3。
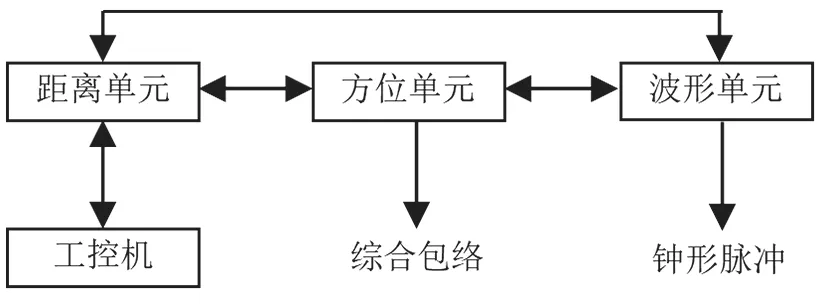
图3 视频处理系统方框图
在正常塔康空/地X、Y 模式下,混合信号是由一等幅的脉冲串和15Hz、135Hz 调幅信号组成。该脉冲串包括主基准脉冲群、辅助基准脉冲群、随机脉冲、识别和均衡脉冲及距离回答脉冲(在被询问时出现),所有这些脉冲都来调制RF 系统产生的RF 信号,15Hz 和135Hz 调幅信号用来改变脉冲调制过的RF 信号的幅度,从而得到包括距离、方位和识别信息的信号。
在塔康空/空X 和Y 模式下,混合信号是由一等幅的脉冲串和15Hz 调幅信号组成,该脉冲串包括主基准脉冲群、随机单脉冲、距离回答脉冲(在被询问时出现)及询问信号,所有这些脉冲都来调制RF 系统产生的RF信号,15Hz 调幅信号用来改变脉冲调制过的RF 信号的幅度,从而得到包括距离、方位信息的信号。
在DME/P 模式下,调制信号只包括随机脉冲和距离回答脉冲(距离回答脉冲只在模拟器被询问时出现)。这两种脉冲具有恒定的幅度,对RF 信号进行调制,从而得到只含有距离信息的RF 信号。
在工常塔康空/地X 模式下,调制包络是由3600对/秒脉冲所组成(7200 个/秒脉冲),在这些脉冲对中,有900 对代表方位基准脉冲群(主基准和辅基准),其余的2700 对组成随机脉冲(有或无距离回答脉冲)或识别和均衡脉冲,所有的脉冲对都被15Hz 和135Hz 调制。
在正常塔康空/地Y 模式下,调制包络由用于方位基准脉冲群的单个脉冲和随机脉冲对或识别和均衡脉冲对组成,速率为7155 个/秒,在这些脉冲中1755 个代表方位基准脉冲群,余下的5400 个(2700 对)为随机脉冲(有或无回答脉冲)或识别和均衡脉冲对,所有这些脉冲都被15Hz 和135Hz 调幅。
在塔康空/地X、Y 模式下,随机脉冲对以随机的间隔,2700 对/秒的速率传输,提供足够的填充脉冲由15Hz 和135Hz 进行幅度调制。在一个识别信号的传输期间,随机脉冲对由一串识别脉冲所代替。这个脉冲串的重复速率为1350 对/秒。并且在上述的基准群后740μs 出现识别信号的第一脉冲,为了保证脉冲重复频率和在传输识别信号期间的方位误差最小,在每对识别脉冲后100μs 传送一个均衡脉冲对。在主基准和辅助基准群前后60μs 期间,没有随机和识别脉冲。
模拟器发射距离回答脉冲对以响应询问器的询问脉冲对。这个响应的延迟时间是从第一个询问脉冲的前沿到第一个回答脉冲的前沿即零公里延迟。回答脉冲对代替随机脉冲对以维持填充速率为2700 对/秒,在主、辅基准脉冲群期间及前后60μs 范围内空出。
15Hz 和135Hz 幅度调制模拟通过旋转天线阵列所出现的在地面台的塔康信标的调制。在正常(T/R)X 模式下,15Hz 幅调与主基准同步。结果在信标的正南点,主基准群的第10 个脉冲与15Hz 幅调的正斜率点重合,而在从正南开始分成几个40°点上,每个辅助基准群的第12 个脉冲与135Hz 调幅的正斜率点重合。在正常(T/R)Y 模式下,重合点在主基准群第6 和第7 个脉冲中间,而辅助基准群在第12 个脉冲上。
在A/A 距离+ 方位工作模式下,发射一主基准脉冲,它包含10 个间隔为30±0.1μs 单脉冲和速率为1350 个/秒的随机单脉冲以及编过码的A/A 询问脉冲。当模拟器被从塔康来的编码脉冲询问时,单个的距离回答脉冲也被发射出去,全部的脉冲信号都被15Hz 调幅信号调制,以对塔康提供方位信息。
为了获得测距信息,被测设备产生并发射给模拟器一对询问脉冲,这些脉冲经模拟器检波和解码延迟一定时间后,产生一个回答脉冲对或一个回答单脉冲。在模拟器的脉冲延时为零公里延迟与模拟的脚离延迟之和。当接收到距离回答脉冲时,被测设备要减去零公里延迟,把总的时间分成两段,解决了在一个方向上的距离传输,这就是测距信号。这个距离信号实际代表着从地面台到飞机的距离(在T/R 模式下),而在A/A 模式下则代表主机到僚机的距离。
方位信息包含在主基准脉冲群、辅助基准脉冲群、15Hz 和135Hz 调幅信号中,为得到方位信号,15Hz 的调幅信号的相位相对主基准是可调的。当15Hz 调幅信号的正斜率点与主基准脉冲相重合时,方位定义为零度或北,如果被测设备指示为零度方位,就表示从飞机上看地面台的方向。当15Hz 调幅信号谷点与主基准脉冲相重合时,方位角定义为90°或东;当15Hz 调幅信号的负斜率点与主基准脉冲相重合时,方位角定义为180°或南;而15Hz 调幅信号的峰值与主基准脉冲相重合时,方位角定义为270°或西。这样飞机的方位指示器将总是指示出从飞机到地面台的而不是地面台到飞机的方位。为增加方位信号的精度,再产生一个135Hz 调福信号,它与辅助基准脉冲的关系正如15Hz 调幅信号与主基准脉冲的关系一样。由于135Hz 调幅信号是附加在15Hz 调幅信号上的。所以,135Hz 调幅信号所决定的方位信号的精度将是15Hz 调幅信号的9 倍。
对识别信息,在正常(T/R)X 或(T/R)Y 模式下,模拟器将每37.5s 产生一个键控识别信号,而在识别状态下,产生连续的识别信号。键控识别信号是由莫尔斯码组成,实际上代表着由地面台所产生的识别信号。只是每个地面台都指定有自己的识别莫尔斯码,连续的识别信号是一个固定频率的信号,它用来检测和维修被测设备的识别电路。这两种情况都是间隔为740μs,速率为1350Hz 的识别脉冲对,它的相位锁定在基准脉冲上。在发射识别信号的过程中,随机脉冲对是不发射的。在发射的识别信号中,为了提供足够的脉冲对给15Hz 和135Hz 调幅信号,还要同时产生均衡脉冲对。均衡脉冲对是在识别脉冲对后100μs 处,这样就保持了2700 对/秒的速率,以保证方位精度。
4.1 距离单元
距离单元主要产生距离、距离跟踪速率数据信息,距离回答概率控制信号,产生随机填充脉冲、A/A询问脉冲;10%、50%电平检测及RF 电平控制等信号。距离单元原理框图见图4。
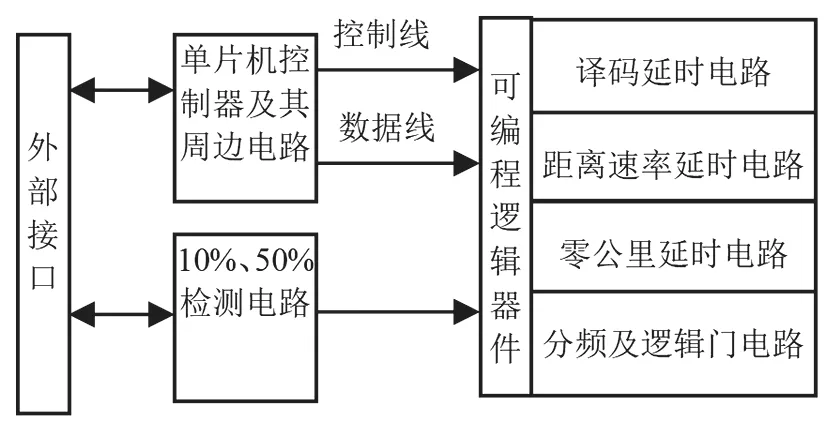
图4 距离单元原理框图
距离单元采用单片机来控制协调整个单元,包括与工控机通过RS232 接口进行通讯。考虑到距离单元在产生回答信号时需要延时,最小延时多少就意味着距离的最小变化量,在DME/P 状态对距离精度要求高,因此,延时精度要求很高,所以在选用晶振时选用了高稳定、高精度晶振。
50%电平检测主要完成对前端设备来的视频信号进行检测,产生50%脉冲信号送给译码延时部分。1%、50%电平检测部分采用了成熟电路。
4.2 方位单元
方位单元用于产生方位、方位跟踪速率数据信息;产生调制度控制信号、15Hz 和135Hz 包络信号、主辅基准群触发信号以及识别脉冲及平衡脉冲。
方位单元采用单片机来完成控制、计算功能,并与工控机进行串行数据通信,接收工控机发送来的命令和数据,获得工作状态和参数,作出相应的控制,包括方位主辅基准延时电路、主辅基准群触发信号的产生、调制度调整电路等。方位单元原理框图见图5。
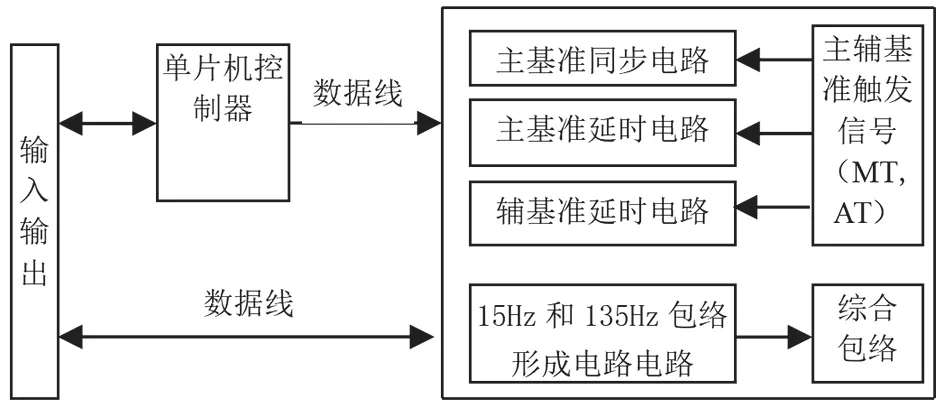
图5 方位单元原理框图
15Hz 和135Hz 包络的形成是由4.86MHz 的温补晶体振荡器经分频后产生54KHz 和486KHz 的时钟进入地址计数器顺序产生0 ~3600 范围的地址,进而读取数据存储器中的数据,使其连续输出地址数据,再送给D/A 转换器,D/A 转换器将数字脉冲信号转换成1Hz 和135Hz 正弦信号;由15Hz 和135Hz 模拟信号经加法器形成综合包络信号;135Hz 的一周期完成后的清零脉冲直接形成辅助基准触发信号,利用主辅基准频率9:1 的关系,对辅助基准触发信号进行九分频形成主基准触发信号。
将形成的主辅助基准触发信号送入方位延时电路作为方位延时电路的触发信号,方位延时电路将预先设置好的方位延时数据进行延时,从而完成方位数据信息的形成。同时,将形成的辅助基准触发信号送入识别形成电路,产生出识别脉冲和均衡脉冲。
方位单元需要的硬件电路较多,包括包络数据存储器,包络D/A 转换器,调制度控制D/A 转换器以及其他时序电路,为了减小体积,提高可靠性,在方位单元除了采用单片机技术外,还采用大规模可编程逻辑器件来完成本单元的功能。
4.3 波形单元
波形单元主要用于主辅基准群形成,产生脉冲序列控制和脉冲对编码,钟形脉冲形成、功率测量;频率合成器控制以及产生莫尔斯码。
波形单元采用单片机来控制协调整个单元,包括工控机通过RS232 接口进行通讯,采用串形数据收发端口完成。波形单元原理框图见图6。

图6 波形单元原理框图
由距离单元和方位单元产生的随机填充脉冲、主辅基准群触发信号、识别及平衡脉冲送入波形单元,波形单元根据工作模式和状态,对这些信号进行组合和脉冲对编码。脉冲对编码信号将时钟打开,通过D/A 转换器将数字脉冲信号转换成钟形脉冲信号,钟形脉冲再经过放大后送往调制器组件完成脉冲调制。
4.4 输入/输出系统
输入/输出系统主要用于键盘管理及屏幕显示;向各视频分机发送控制命令及参数、数据;接收各视频分机发送来的数据并显示;要求界面设计良好,操作简洁,明快。输入/输出系统原理框图见图7。
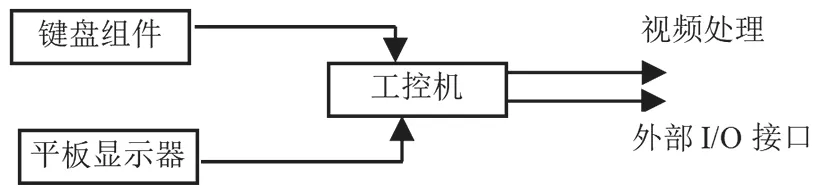
图7 输入/输出系统原理框图
在输入/输出系统采用工控机作为主控制器,完成键盘信息的输入和有关信息的显示输出,在DOS 环境下运行,软件采用C 语言编制,工作于图形模式。在工作过程中,将从键盘输入的工作状态(包括空/地、空/空、DME/P)、工作模式(包括X、Y、Z、W)、波道信息、距离和距离速率数据、方位和方位速率数据、随机填充率等信息进行识别、判断、分组、打包,发送给各视频分机。
另外,在工作过程中,各视频分机将计算出的距离数据、方位数据和测量出的功率数据回传给工控机进行显示。
5 结语
本设计充分考虑测试的需求以及系统的易操作性、实用性等要求,采用总线化、模块化的测试技术组建的信号发生平台。该设计合理,应用技术成熟,可以为塔康和DME/P 设备的修理深度提供一定的支撑。
