基于MATLAB 的双馈风力发电机组动态特性分析
2023-10-30张惠强
张惠强
(国电电力内蒙古新能源开发有限公司,内蒙古 呼和浩特 010020)
在经济持续增长的同时,能源问题也逐渐暴露在世人面前,为了早日摆脱能源枯竭的困境,不少业界人士将视线投向了风力发电,风力发电具有诸多优势,因此,如何将其转换成人类的基本电力,是一个亟待解决的课题。针对这种特殊的风能变化,通过对风力发电机在不同工况下的风能变化进行了分析,计算不同工况下的风能变化、动态性能,通过MATLAB 软件对其进行了模拟,得出了其动态特性,对于进一步开展双馈异步电动机的深入研究和市场的应用具有重要意义。
1 双馈风力发电机组动态特性分析必要性
风力发电是一种清洁无污染、易获取、储量巨大的可持续发展的新能源。但是,风力发电是一种时序性、随机性的能源,其输出功率存在很大的波动,而当风力发电装机的规模越来越大时,大规模的风力发电将会对电力系统的供电品质产生一定的不利作用。但在仿真分析的过程中,由于传统的蜜蜂算法收敛速度慢,容易陷入局部最优化,将遗传算法与其相融合,并采用了一种基于高斯化和混乱干扰的改进方法。采用该方法进行了BP 网络的参数优化和风速预报,结果显示,该方法具有较高的预报准确率和较好的预报性能。基于MATLAB 的双馈风力发电机组动态特性分析,提出了一种多模式的状态预报控制器,用于解决常规PI 系统中的电力波动大和输出超调量大等问题。模拟实验证明,与PI 相比,MMPC 系统的速度和输出功率的波动明显减少,而在风速干扰的影响下,舵面运动的改变幅度明显减少。风能是由风车通过能源转换为电力的过程。由于双馈风力发电机组自身的优点,这种无污染的新能源被人们所重视。再加上天然的风能是无穷无尽的,因此,各国对风能的利用也是越来越多。
2 双馈风力发电机组动态特性分析的原理
2.1 工作原理
双馈变频风电机组包括四个主要组件,其中,双馈式风电机组的总体架构,这种双馈型风力发电机的工作模式是:将风力马达的转子与发电机的转子之间以接触的形式驱动,这时,发电机的线圈是由AC 转换成DC,然后连接变流器和电网。风力机、传动系统、变桨执行机构和发电机的具体数学建模,并在MATLAB 上建立了开环动态性能测试系统。将该模型进行了分段线性化,并在此基础上导出了该单元的状态空间模式。通过分析双馈式风电机组的动态工作动态学特点,即在低于正常工况时,将转子度维持在最低限度,通过调整风力发电机的速度,使得机组达到最大的风能利用率,从而达到最大的风能利用率;超过标称速度时,保持额定速度,调整转子距角度,使其接近标称的动态。
2.2 研究思路
在了解了双馈异步变速恒频风力发电系统的工作原理的基础上,基于MATLAB 分析双馈风力发电机组动态特性。变速风力发电装置需要把风力转化为机械能,再把机械能转化为电力,完成电力输送。双馈异步电动机的转子、定子是用两个变流器相连的。在电网的常态工作条件下,转子端变频器通过对速度进行调节,使功率的输出达到最佳,这就是转子回路的变频点。
双馈变频器采用更低的变频器,它的额定能力稍大于其发电机的标称能力乘以其额定的滑动偏差,一般为风电场的25%。电网变流器通过不依赖转子的数字和方向来调节其DC 连接的电压,并在网络中维持均衡。针对风速本身的特性,本文提出4 种不同的风模式,即基础风Va、阵风Vb、渐变风Vc 以及随机风Vd。在此基础上,构建形成相应的数学模型。具体的仿真模型如下:
设VWB 为恒定风速,表示风速模型的平均速度,设VWG 为阵风风速,描述风速突然变化的特性,其数学模型如公式(1),t1G 表示阵风的开始时间,tG 表示阵风的持续时间.VG max 表示阵风的最大值,t 表示有风的时间,设VWR 为渐变风速,描述风速的渐变特性,其数学模型如公式(2),t1R 表示阶跃开始的时间,t2R 表示上升截止的时间;VR max 表示风速阶跃最大值。设VWN 为随机风速,可以用Simulink 中的白噪声表达,设风速为VW,则为公式(3)。
3 双馈风力发电机组动态特性分析的结果
3.1 正常运行时风电机组输出特性仿真
基于双馈感应发电机的数学建模,利用Matlab 软件对其进行建模,该组件的分系统结构是由风力机、感应发电机定子电流、电网一侧变换器电流组、发电机、变频器等的子组件构成。设定了双馈式风力发电机的各项参数,并用模式视窗中的配置控制器来开启设定模拟参数的对话,选取Ode23tb 演算法,设定模拟起始时刻0s,终止时刻10s。通过模拟计算,得出了风力发电机在一定速度下的输出量的变化规律,结果表明,在一定的风速条件下,风力发电机的出力是平稳的,而风力发电机的有功功率随着出力的增加而增加到一定的水平。
通过对风力发电系统的模拟,发现风力发电系统在风力发电系统中的输出容量在一定范围内仍能维持较好的稳定性,而风力发电机的有功功率随着出力的增加而增加。通过比较发现,无论是在固定风速或阵风速度下,双馈异步风力发电机的输出电压均能维持在一个较低的水平,且在较长的一段时间内,其输出电压均能达到较好的稳定性。

图1 阵风风速下风电机组输出特性变化曲线
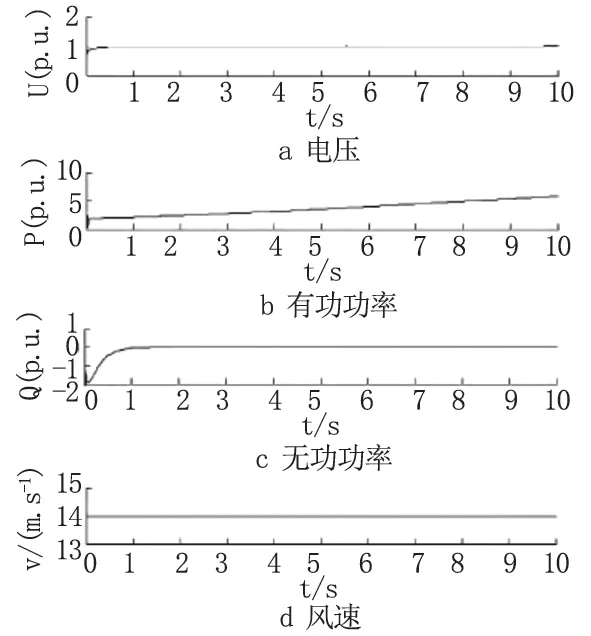
图2 恒定风速下风电机组输出特性变化曲线
3.2 故障运行时风电机组输出特性仿真
采用失效模式设定了单相短路,设定1s 内出现一次单相短路,1.2s 内排除,模拟起始点0s,终止点2s。通过模拟单相短路故障时风电机组输出特性曲线可以看出,当发生电网单相故障时,风电机组的出口电压降低,出口电流增大,但是变化幅度都较小。风电机组的输出有功功率和无功功率也会出现少许的波动。故障清除后,风电机组为了使端电压恢复到给定值需要从电网中吸收无功功率,恢复速度相对较快。采用模式中的失效模式设定三相的短路,设定1s 内出现三相短路,1.2s 内排除,模拟起始时刻0s,终止2s。通过对风力发电机三相短路事故的分析,得出了风力发电机在三相短路事故中的输配电性能图。经过一段时间的检修,风力发电机的电压可以在短的一段时间内恢复到原来的运行,但是其恢复速率比较缓慢,而且在失效的地方,有功和无功的值都会比失效之前降低。

图3 单相短路故障时风电机组输出特性变化曲线
3.3 总结分析
在风速为常数的情况下,该双馈风电机组的输出电压及输出功率均为常数。在双馈风扇机组中,在风速波动时,其输出电压几乎不变,而其输出功率则会随风速的改变而改变。在电网发生单相干短路时,可使系统的输出电压下降,并使其具有较低的有功、无功等方面的功率变化,一旦排除了这些问题,就可以相对快速地回到原来的运行。在网络发生三相短路时,风电场的输出电压会急剧下降,而其输出的有功也会随之减少,并且为电力系统输送了大量的无功,从而使风电场在排除了这些问题后,重新回到原来运行的时间要长一些。
4 MATLAB 技术在双馈风力发电机组动态特性分析的应用
4.1 方法分析
首先,对风轮、传动系统、变桨执行机构、发电机进行了建模,建立了风轮、传动系统、变桨执行机构和发电机的数学建模,建立了系统的模型,通过MATLAB/Simulink 软件建立了系统的模型,通过对模块的分段进行了线性分析,得到了系统的状态空间建模。为了克服传统的人工蜜蜂算法容易陷入局部最优、收敛速度慢的缺点,将遗传算法与其相融合,并将其应用于后续的高斯化和混乱干扰中。为了检验该方法的效率和效果,采用了一种经典的试验方法,并利用该方法进行了参数识别。仿真试验证明,该方法具有收敛精度高、全局和局部优化性能好、稳定性好等特点。利用经试验证明的改良的蜂窝结构优化方法进行了BP 神经网络的参数优化和风速预报,并与BP 神经网络的实测结果进行了比较,结果显示,该方法具有较高的预报准确率和较好的预报性能。针对常规PI 控制方案中的电力波动大、输出超调量大等问题,MATLAB 技术从理论上分析了该系统的基本特性,建立了一种多模式的预报控制器,通过对阶跃风、阵风、湍流风等不同风速情况的模拟计算,发现该方法可以在低于标称风速的情况下,实现对最大风力的追踪,使其平稳地实现输出功率的平稳,超过标称风速时,其速度和输出功率的起伏明显减小,而偏心执行器因风速干扰而提早启动,俯仰角度的变化也相对较小。总的来说,MMPC 控制方案,既能获得最大风能捕获和平滑输出功率,又能在某种程度上减少螺距运动的改变,减少机器的机械疲劳,提高使用装置的使用年限。与PI控制相比,在最大风力追踪期,多模式预报控制方案的性能提高不明显,故在低于标称风速时,其最大风力追踪控制仍需深入探讨。
4.2 应用效果分析
MATLAB 技术以全机动态学模式是以转矩控制为核心,以转矩为基础,以向量控制为基本单元。通过在3~25m/s 的速度下,通过仿真分析,得出3 ~25m/s 的有功功率、转速与机组的功率因子1。通过仿真对比表明,采用直接转矩-空间矢量调频技术能够较好地反映出机组的稳定工作状态。为评价直方转矩-空间矢量调变系统的动态学特性,以低于额定风速、高于额定风速和接近额定风速3 种工况下的动态特性进行仿真,并与常规的转矩控制作比较。在模拟时,把单位的电力系数设定为1。低于标称风速时,当风力发生变化(1s 内从7m/s升高到8m/s,而在1s 内,风力从7m/s 降低到8m/s)时,单位电力的反应。仿真表明,在低于标准风速条件下,当风速出现1m/s 的瞬时,采用直接转矩-空间矢量调频的方法可以获得更高的反应速率,但因单位功率小,两者之间的差异并不显著。此外,由于常规的转矩控制在低负载情况下的控制效果较差,因此,与直接转矩-空间矢量调节方法的速度有较大差异。随着风力的增大,两者之间的距离也随之缩小。
在接近标称的速度时,当风速出现变化时(从1s的10m/s 到11m/s,从1s 到10m/s)的有功电力的反应,可以看到,风力发电机的运行状况从最大风能跟踪到标称运行。在给定工作条件下,仅有的控制风能输出(不计偏转)的方法是调整螺距角度。滞环控制系统在启动时,要有一个扭矩的误差。因此,与直接转矩-空间矢量调制控制相比,对俯仰角度的调整有一定的延迟。可见,此时的速度也会有很大的改变。传统的转矩控制方法在反应速率上,不如采用直接转矩-空间矢量的方法。另外,在接近固定风速的情况下,这种差异是非常显著的。
当超过标称风速时,该设备的速度会出现变化(从1s 的15m/s 增加到16m/s,从1s 下降到15m/s),该设备的有效功率反应,如图所示,当超过标称风速,当该设备处于额定功率时,该电机的直接转矩-空间矢量调频仍具有较高的反应速度。不过,由于发电机的功率已经达到了极限,这两种方法在反应速度方面的差别并不大。
通过对转子的速度特性的分析,发现在采用直接转矩-空间矢量调节模式时,风速对速度影响不大。在干扰出现后,常规的直接扭矩调节要6s 左右,才能实现完全的稳定。本文针对一台双馈式风电机组,从理论上导出了一种采用直接转矩-空间矢量调节的方法,并根据该系统的动态建模,模拟了在不同的额定风速、不同的风速和不同的不同工况下,不同的机组在不同工况下的动态特性。通过与常规的转矩控制方法的比较,得到了较好的效果。通过对直接矩-空间矢量调变的稳态校核,证明了采用这种方法所得到的发电机的稳态特性和所需的设计参数有很好的一致性。本文所提出的控制逻辑是正确的。从模拟实验中可以看到,利用PI 控制器代替转矩环与转子磁链环滞环控制器,使其在控制精度和反应速率上都得到了明显的提高;因为提高了俯仰角度的调整速率,因此,当发电机在接近标称风速时,采用直接转矩-空间矢量调幅来提高其性能。
5 结语
综上所述,风力发电系统的瞬时、随机性对发电系统的运行性能有很大的影响,但由于风力发电系统的大量投入,使得风力发电系统的发电能力越来越强,风力发电对电力系统传输质量的影响也越来越大。针对风力发电机在随机风速的影响下,采用了一种新的CGCGABC-BP 神经网络进行了风速预报,采用多个模式的可变桨距预报控制器,使其能够达到最大限度地减小输出功率的目的。
