一种无人值守巡检机器人行走机构的设计研究
2023-10-30常微于福龙卢元利樵永锋张伟
常微,于福龙,卢元利,樵永锋,张伟
(丹东东方测控技术股份有限公司,辽宁 丹东 118002)
随着国家数字矿山到智慧矿山的推进,图像识别技术及环境监测技术在矿山生产中得到了新的发展。尤其智能巡检机器人在矿山中的应用得到了广泛的推广。以国家战略性需求为导向推进创新体系优化组合,工业4.0 时代不仅仅会给全球各行各业带来新发展和新的变革,也势必给我们矿业行业带来新的发展机遇,无人化和智能化,正在将人类社会快速的推向智能化时代,国家大力发展5G+工业互联网,在5G 和智能制造的带动下,实现智能化、无人化。智能巡检系统立足解决皮带巡检工作存在的劳动强度大、工作环境恶劣等问题,产品技术附加值高,融合了5G 通讯技术及AI 智能算法,可实现对皮带系统运行状况、人员工作状态、潜在故障等进行全天候监测,智能巡检系统的研发已经提上日程,助力“中国制造2025”,为智能矿山持续助力指日可待。
1 整体结构设计
本文设计的无人值守巡检机器人行走机构,整体机构方案如图1所示。其组成包括从动轮机构、主动轮机构、承重导向轮机构。

图1 整体结构方案图

图2 从动轮机构示意图
1.1 从动轮机构
根据从动轮所需压紧力、摩擦力计算,轮体选用邵氏硬度65 ~70 橡胶制成,在保证摩擦力需求的情况下,兼顾耐久性,实现较低的维护量。端盖为减轻设备整体重量及配重采用铝合金材质,同时,为保证轮系的可靠性在轮座螺纹孔内加入钢丝螺套防止螺纹反复使用导致失效。在机器人经过导轨缝隙或转弯时,星形把手配合低压缩量弹簧(48.8N/mm)可以使机器人从动轮机构夹紧轨道,这样就有足够的摩擦力防止从动轮机构打滑,同时,保证从动轮与主动轮以相同的角速度平顺过弯。连接套起到防尘、防水的作用,采用三防布材质在从动轮机构过弯时允许有5 ~10mm 的窜动量,以保证编码器接线不被折弯。
旋转轴与轮座连接处使用塑料轴承连接,机器人巡检时,整体会暴露在充满粉尘的空气中,塑料轴承避免了常规轴承易进灰尘,维护拆修困难、费时费力等弊端,从而降低维护量,节约成本。从动轮行走过程中主要受到径向力,整台机器人重25kg,最快行走速度0.5m/s,因此选用深沟球轴承。在旋转轴、连接套、支座与转接板装配时,要安装密封圈,以达到巡检机器人整机IP65防水、防尘的设计要求。
1.2 主动轮机构
根据主轮所需启动的摩擦力,轮体采用与从动轮一致的橡胶(邵氏硬度65 ~70)制成。轮毂、端盖、轮座均采用铝合金材质以减轻设备整体重量。在常规巡检中,连接轴只受径向力作用,因此,与主动轮座配合使用深沟球轴承连接。主动轮机构选用抱闸伺服电机为整台机器人提供动力输出,当现场安装或调试时,出现断电情况,机器人的整个轮系是无法转动的,25kg 的机器人依靠人工送回充电桩或维修点费时费力,如图3 设计的离合机构就可以解决上述问题。旋动定位销上端螺堵,使离合套推动弹簧向下移动,定位销完全脱离联轴器后,主动轮可以实现自由转动,机器人维修或者调试时,可以在轨道上自由滑动。

图3 自动转运装置示意图
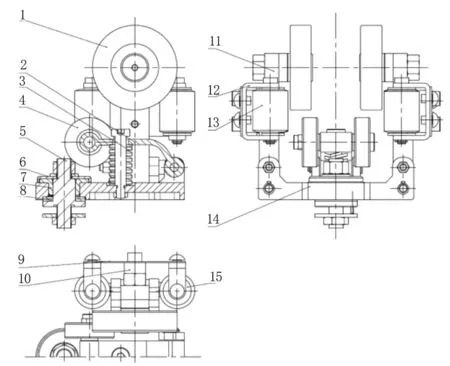
图4 承重轮机构
1.3 承重导向轮机构
承重轮需要在粉尘、低温(工作温度/湿度:-40~60℃/RH ≤90)等恶劣工况下保证跨越断轨、提升爬坡及同步转弯功能。因此,承重轮采用聚氨酯材质,邵氏硬度55 ~60,配合密封轴承,这种设计可以应对各种工况同时降低维护量。下导向轮的作用是在机器人爬升时(最大爬坡角度20°),保证机器人时刻与导轨贴合,同时,也避免机器人高速行驶至爬升区域,离心力及惯性对电气元件冲击及机器人本体的冲击。使整个爬升过程流畅稳定。设计该结构时需要注意弹簧预紧力要适中,过紧则摩擦力增大,增加电机负载,减少机器人续航时间。相反,预紧力较小时,则起不到对机器人的保护作用。转向轴与行走机构底座连接时要安装止推垫片防止转向轴的轴向窜动,安装铜滑套使导向轮支架旋转顺滑,保证行走机构在过弯时起到导向的作用(转弯半径:水平≥1.5m,垂直≥2m),减小转弯时的摩擦力,引导机器人的前进方向。
导向轮由尼龙轮毂配合不锈钢轮套及密封轴承组成,尼龙轮毂起到减轻重量的作用,不锈钢轮套可以减少机器人行走时的滑动摩擦力,同时,降低机器人在常规巡航状态下的维护量。导向轮支架与垫块配合时要考虑到定位精准,使板簧安装后与承重轮架保持平行。板簧是整个导向轮组件的核心,其原理类似汽车悬架中应用最广泛的一种弹性元件,由若干片等宽但不等长、厚度可以相等也可以不相等的合金弹簧片组合而成的一根近似等强度的弹性梁。在转弯过程中,主片卷耳受力严重,是薄弱处,为改善主片卷耳的受力情况,常将第二片末端也弯成卷耳,包在主片卷耳的外面,称为包耳。为了使得在弹性变形时各片有相对滑动的可能,在主片卷耳与第二片包耳之间留有较大的空隙。这种结构就解决了转弯时机器人卡顿,转向迟钝,有效减小转弯半径,同时,延长了整套导向机构的使用寿命,节约了成本。
1.4 电机选型
伺服电机为巡检机器人行走机构的动力来源,其精度高,可实现位置、速度和力矩的闭环控制,克服了步进电机失步的问题;高速性能好,一般额定转速能达到2000 ~3000 转;适应性强,抗过载能力强,能承受三倍于额定转矩的负载,对有瞬间负载波动的和快速启动的场合特别合适,电机加减速的动态响应时间短,一般在几十毫秒内,同步进电机相比发热和噪音明显降低。
主动轮机构所需有效功率:
传动装置总效率η=η²齿轮·η²承·η 轮·η 联。
齿轮啮合效率η齿轮=0.97(齿轮精度为8 级)。
轴承效率承η承=0.99。
联轴器效率联η联=0.99。
橡胶轮轮η轮=0.96。
传动总效率η=0.97²×0.99²×0.99×0.99=0.904。
所需电机功率:
连接轴橡胶轮端P3=P0·η 齿轮²·η 承²·η 联·η=180·0.97²·0.99²·0.99·0.99=0.163kW。
减速器速比i=30。
主动轮扭矩
本研发项目选择的是自制电机,型号为DFMC62-24-B,其技术参数如表1。

表1 电机参数表
1.5 结合TRIZ 创新理论优化设计
矛盾分析:
(1)根据因果链分析原理,解决顶轮夹紧力不足,如果要提升顶轮夹紧力,那么就要增加顶轮的预紧压力,但轮系整体能耗增加。将问题模型标准化为对应的39个通用工程参数:改善的是压力,恶化的参数动物能耗。通过查矛盾矩阵表得出可使用的发明原理有:曲面化原理、中介物原理、预操作原理,热膨胀原理。根据矛盾分析,可使用曲面化原理,将物体的直线部分用曲线或球面代替。
(2)运用物理矛盾原理,顶轮夹紧力既要小又要大。顶轮夹紧力不足,会出现机器人在运行过程中打滑、晃动,夹紧力特别大会出现摩擦增大,电机负载、能耗增加。
(3)根据因果链分析原理,解决机器人转向时承重轮摩擦阻力大,如果要解决转向时承重轮滑动摩擦阻力大,那么可以增加回转机构降低轮系阻力,但装置复杂性增加。将问题模型标准化为对应的39 个通用工程参数:改善的是力,恶化的参数装置复杂性,通过查矛盾矩阵表得出可使用的发明原理有:复制、参数变化、预操作、振动,根据矛盾分析,可使用预先作用,预置必要的动作、机能。
(4)运用物理矛盾原理,回转机构内的导向轮距离轨道既要近又要远。由于增加回转机构,机器人在转弯行驶时,导向轮要根据转弯半径不同,提供不同的压紧力,弹簧钢材质可根据轨道形状自适应压紧轨道。
2 结语
(1)巡检机器人配合行走机构,可以适应恶劣环境,实现跨断轨,多自由度行走,提高了工作效率,减少了工作人员的劳动强度。
(2)巡检机器人行走机构,外露部分零部件定制了相应的防水、防尘措施,可以杜绝样料粉末机器人的磨损,降低维护量,延长设备使用寿命。
(3)主动轮机构的离合组件,从动轮机构的弹簧压紧组件,承重轮机构的导向组件,既保障了机器人在巡检时的可靠性与稳定性,也降低了企业的运维成本。
(4)利用TRIZ 创新方法,对机械结构进行优化,可以降低成本,缩小整机结构空间,减少整套轮系重量,更好地适应恶劣的极端环境。
