面向多主瓣干扰的波形与滤波器联合认知设计方法
2023-10-29余显祥崔国龙
林 瑜, 卜 祎, 余显祥, 崔国龙
(电子科技大学信息与通信工程学院, 四川 成都 611731)
0 引 言
随着现代电子技术的高速发展,电子对抗日益激烈,各类干扰样式层出不穷,严重阻碍了雷达系统的正常工作。针对旁瓣干扰,旁瓣匿影[1]、超低旁瓣[2]、旁瓣对消[3]等旁瓣干扰抑制技术已发展成熟。而对于主瓣干扰,干扰能量上具有绝对优势,并且主瓣干扰在空时频等维度上与目标高度重合,现有干扰抑制手段效果欠佳,仍是雷达界亟需要解决的难题之一[4-6]。一般的抗主瓣干扰方法有:信号处理以及波形设计。
中国改革开放40年来的农村扶贫开发,是在从计划经济体制转向社会主义市场经济体制、从传统农业社会转向工业和现代化社会的双重转型重叠期,在中国既有的政治、经济、社会和文化基础上,由党和政府规划、领导、协调和支持,贫困人口通过自身的努力增加收入、提高福祉与发展能力、提高分享国家改革和发展成果能力,进而实现脱贫致富的过程。改革开放以来,中国农村扶贫开发取得了举世公认的巨大成就,7亿多农民摆脱了贫困,创造了世界减贫史上的一大奇迹,被国际社会广泛视为人类社会扶贫的一个成功样板。与此同时,扶贫开发,也成为中国道路、中国经验和中国发展模式的重要组成部分。
信号处理抗主瓣干扰方法主要是利用干扰信号和目标回波在时、频、空、极化等域的差异性,通过检测识别、自适应滤波等信号处理方法,达到干扰抑制的效果。常见的信号处理方法包括盲源分离和滤波处理。
盲源分离可以在不需要先验知识的情况下,利用干扰信号与目标回波在时、频、空、极化等域的差异性,对混合信号进行分离,广泛运用于雷达抗干扰[7-10]。然而,基于盲源分离的方法,在混合信号分离后,往往还存在少量干扰残余,且针对的都是单一类型的干扰。滤波处理主要是利用干扰信号与目标回波在时、频、空、极化等域的差异性,在不同维度上设计滤波器参数,达到干扰抑制的效果[11-18]。然而,基于滤波的方法大都需要精确干扰参数,且单一滤波方法可能仅适用于某一干扰类型。
相比于信号处理,波形设计抗主瓣干扰方法,不需要经过复杂的信号处理手段,仅仅通过设计脉内、脉间波形的相位、频率等信息,放大目标回波和干扰信号在时、频、空、极化等域的差异性,就能达到抗干扰的目的,已成为抗主瓣干扰研究的重点方向之一。
数字射频存储器(digital radio frequency memory,DRFM)可对接收到的信号进行高速采样、存储、干扰调制等,在电子干扰技术中运用广泛。针对DRFM距离欺骗干扰,在干扰滞后目标回波至少1个脉冲重复周期(pulse repetition time, PRT)的前提下,文献[19-20]提出在不同PRT发射不同的正交信号,并在接收端进行匹配滤波抑制距离欺骗干扰。由于干扰滞后,当前PRT内的干扰信号与目标回波信号正交,经过匹配滤波后被滤除,从而达到抗干扰的目的。然而,当干扰信号变为快转发信号时,此方法失效。针对快转发的间歇采样干扰,文献[21-22]分别提出一种脉内正交的线性调频-相位编码波形以及脉内频率正负交替变化线性调频(linear frequency modulation, LFM)信号,其抗干扰思想均是利用未被转发干扰机截取的发射信号信息进行对抗。文献[23]基于角域波形与干扰信号之间的幅度差异,利用波形优化的方法来压缩干扰信号,有效对抗了DRFM转发式干扰。文献[24]通过同时最小化发射信号与滤波器的积分旁瓣电平以及干扰信号与滤波器的互相关电平,使得干扰被滤波器滤除,从而达到抗干扰的目的。然而,上述方法只针对单一类型的主瓣干扰,未考虑多主瓣干扰。
针对多主瓣干扰环境,如切片组合(chopping and interleaving,C&I)干扰、间歇采样直接转发干扰、间歇采样重复转发干扰等,本文开展波形与滤波器联合认知设计方法研究。首先,基于恒模相位编码信号,构建了C&I干扰、间歇采样直接转发干扰、间歇采样重复转发干扰信号模型;然后在干扰参数完全已知和干扰参数存在偏差的条件下,建立了发射—接收联合优化问题。其次,利用迭代的限制内存Broyden-Fletcher-Goldfarb-Shanno(limifed memory Broyden-Flefcher-Goldfarb-Shanno,L-BFGS)算法对优化问题进行求解。最后,设计典型多主瓣干扰应用场景完成仿真验证,为复杂电磁环境下雷达抗干扰能力提升提供理论和方法指导。
1 多主瓣干扰下的信号模型
1.1 发射信号模型
如图1所示,考虑雷达系统发射脉冲串信号,对目标进行检测时,面临着多种类型叠加的主瓣干扰威胁。
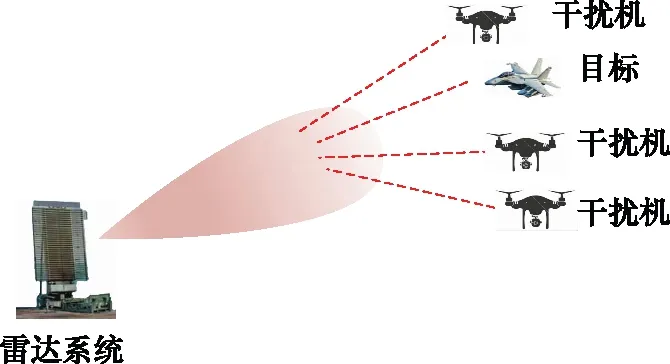
图1 多主瓣干扰下的探测场景
不必要的约束条件可能会造成优化问题求解困难,甚至无法求解。而在恒模约束下,波形进行优化设计时,可直接对波形相位进行编码设计[25]。因此,本文考虑雷达系统发射恒模的相位编码信号s,表示为
s=[s1,s2,…,sNs]T
(1)
式中:sn(n=1,2,…,Ns)为发射波形的码字;Ns为相位编码波形的码字个数;上标T表示转置。
多媒体教学可以丰富学生的情感体验,促进师生交流。在进行古诗词朗诵的时候,通过播放音频,让学生去猜测其中的感情,或者利用背景音乐营造感情并让学生进行区分,利用多媒体去充分调动学生的参与度,使得学生获得更加清晰、多方位的情感体验。因此,教师要善于利用多媒体教学,这更加适应发现探究学习,符合素质教育对此提出的要求,学生的主动性更容易被调动起来。
第n个元素sn可以表示为

(2)
式中:φ为相位编码信号s的相位,即s=exp(jφ)。
以“禅茶养生”为主题,紧扣庐山西海与庐山的佛教文化和茶文化起源进行微电影的拍摄。内容可以以云居山真如寺的发展历程为题材,讲述一位在寺中常年修行的高僧为了增强自己的修行阅历进行茶叶的种植、采摘、烘烤制作以及和寺外来的读书人在品茗中讲经说道的过程,以体现禅茶的悠久历史和它的深远影响。
1.2 C&I干扰信号模型
针对C&I干扰,假设DRFM干扰机对雷达信号进行截取,如图2(a)所示,从si开始,以m个码字为一段,每段转发l次,共截取k段,根据C&I干扰原理,C&I干扰码字总长度与原信号码字总长度相等,因此Ns=klm。

图2 干扰产生原理
C&I干扰信号为
(3)
式中:Ht(t=1,2,…,k)为干扰机截取的第t段,所代表的码字可以表示为
Ht=[s(t-1)ml+i,s(t-1)ml+i+1,…s(t-1)ml+i+m-1]
(4)
A1可表示为
A1=diag(B1)Ns×Ns
1.3 间歇采样干扰信号模型
目前,间歇采样干扰最常见的两种转发方式为直接转发与重复转发,本文研究这两种间歇采样干扰信号模型。
1.3.1 间歇采样直接转发干扰信号模型
针对间歇采样直接转发干扰,假设DRFM干扰机对雷达信号进行截取,如图2(b)所示,从si开始,以m个码字为一段,每隔ml个码字截取一次并转发,共截取k段。
间歇采样直接转发干扰信号为
(5)

(6)
A2可表示为
在实现工作流引擎的所有接口之后,由部署中心执行编译和打包操作,构建成Docker镜像,最后将其上传到镜像仓库,以便后续从镜像仓库中下载指定的镜像,运行相应的Docker容器。
A2==diag(B2)Ns×Ns
1.3.2 间歇采样重复转发干扰信号模型
针对间歇采样重复转发干扰,假设DRFM干扰机对雷达信号进行截取,如图2(c)所示,从si开始,以m个码字为一段,每隔ml个码字截取一次,复制q次后转发,共截取k段。
间歇采样重复转发干扰信号为
④黄公度《卜算子》(薄宦各东西):双调45字,上阕4句23字2仄韵,下阕4句22字2仄韵。句式:55733。5575。
(7)
同理,当间歇采样直接转发干扰或间歇采样重复转发干扰参数存在偏差时,ωJ也可改写成上述形式。
(8)
A3可表示为
A3=diag(B3)Ns×Ns
由干扰信号模型可知,C&I干扰、间歇采样直接转发、间歇采样重复转发干扰等信号可由一个矩阵乘以发射信号产生,即
Jm=Ams
(9)
式中:m∈[1,NJ],NJ为干扰的总个数。
1.4 接收滤波器模型
假设雷达接收端其相应的失配滤波器h长度为Nh(Nh≥Ns),失配滤波器h可以表示为
h=[h1,h2,…,hNh]T
(10)
第n个元素hn可以表示为
(11)
式中:a为失配滤波器h的幅度向量;θ为失配滤波器h的相位向量;h=a⊙exp(jθ),⊙表示Hadamard积。
2 发射波形与接收滤波器联合认知设计优化问题建立
2.1 发射波形与滤波器互相关模型
相位编码信号s经失配滤波器h的输出结果在距离位移k处可表示为
(12)
式中:[·]*表示共轭;Γ1表示一个取值区间,即Γ1=[-(Ns+Nh)/2+1,(Ns+Nh)/2-1]。当k=0时,ω(0)为相位编码信号s经失配滤波器h输出的主瓣电平;当k≠0时,ω(k)表示输出的旁瓣电平。
(4) 抗多主瓣干扰性能:在实际应用中,失配滤波器与多主瓣干扰输出的距离电平应尽可能地低,以此降低干扰信号对真实目标检测的影响。因此,可利用一个最小—最大优化准则来压缩距离电平,即
可利用最小化最大主瓣匹配误差的方法来保持主瓣形状,即
式(12)中所有的距离主瓣电平堆叠在向量ωmain,可表示为
ωmain=[ω-M,…,ω-1,ω0,ω1,…,ωM]T
(13)
ZHANG Xue, ZHANG Deng-hai, CHEN Xiao-ping, TENG Wei-qiang, PENG Bin, ZHANG Yi, WANG Ying, CAO Fan-fan,XUE Xiao-cheng
ωside=[ω-(Ns+Nh)/2+1,ω-(Ns+Nh)/2+2,…,ω-M-1,ωM+1,…,ω(Ns+Nh)/2-2,ω(Ns+Nh)/2-1]T
(14)
为了便于书写,将旁瓣区域记作Γ2,可表示为
式(12)中所有的距离旁瓣电平堆叠在向量ωside,可表示为
Γ2=[-(Ns+Nh)/2+1,-M+1]∪
[M-1,(Ns+Nh)/2-1]
(15)
2.2 干扰信号与滤波器互相关模型
干扰信号Jm经失配滤波器h的输出结果在距离位移k处可以表示为
(16)
(17)

(18)
(2) 干扰参数存在偏差时,认知雷达对多主瓣干扰进行感知,在其他类型干扰信号参数已知的条件下,C&I干扰参数的估计有一定的误差。假设实际C&I干扰的截取段数为k,转发次数为l,感知到的参数截取段数为k′,转发次数为l′。假设误差较小,有k=k′+L,l=l′-L,L为大于0的自然数。
(19)

步骤 3若|fw-1-fw|≤ε,则得到xw并且停止迭代;若|fw-1-fw|>ε,令p=μp,w=w+1,跳转到步骤2。
(20)

2.3 优化设计准则
在对相位编码信号与失配滤波器进行优化设计时,需要考虑很多因素,如雷达目标检测性能、测量精度、杂波抑制、抗电子干扰能力等[27]。
本文主要考虑以下4个因素。
(1) 距离旁瓣:在实际应用中,失配滤波器输出的距离旁瓣电平应尽可能的低,以此来确保微弱目标不被强目标回波信号的高旁瓣所淹没。因此,可通过最小化峰值旁瓣来降低距离旁瓣。即
(2) 信噪比损失:在实际应用中,信噪比如果损失过大,则会对雷达的探测性能造成影响,因此需要对信噪比损失进行控制。
相位编码信号s与失配滤波器h滤波处理后,输出的信噪比损失可以表示为
(21)
在波形给定的情况下,一个典型约束为ω(0)=Ns,那么,式(21)可以化简为
在扫描区域布设标靶,采用无棱镜全站仪测量标靶具体坐标,将扫描数据坐标转换至工程独立坐标中。为了提高扫描数据坐标转换精度,应在测区周围均匀布设四个及以上的反射片标靶。这些反射片标靶应避免处于同一面上或同一条线中。为了防止影响地面三维激光扫描仪扫描及后期拼接精度,反射片标靶的布设不能太远,一般距离保持在30 m左右为宜。
(22)
由式(22)可知,信噪比损失将随着hHh减小而减小。因此,可同时约束|ω(0)-Ns|和|hHh-Ns|来控制SNRloss,即
(23)
式中:常数η1≥0;常数η2≥0。
(3) 主瓣控制:假设q∈C2M+1为期望的主瓣。向量e=[e1,e2,…,e2M+1]为期望主瓣与设计的主瓣的误差向量,可表示为
e=ωmain-q
(24)
误差向量e的第n个元素e(n)可表示为
e(n)=ω(n-M-1)-q(n), 1≤n≤2M+1
(25)
为了提升设计自由度,可适当展宽相位编码信号经失配滤波输出信号的主瓣[26]。假设ω(k)(k=0,±1,…,±M)为展宽后的主瓣区域,M为主瓣宽度控制参数。
该变频电动机高速运行时转速较高,故采用了护环结构,端环为下端环结构,护环与端环固定,导条经涨紧处理,这些均采用以往的成熟设计。
第二,特色农产品质量无法保障,售后机制不完善。通过互联网销售特色农产品,不是简单的销售渠道的方面,更重要的是保证消费者收到质量高的农产品。很多消费者在进行区域特色农产品购买时候,当产品送达时,产品出现过期、与特色农产品不符等状况,同时,还无法便利进行售后,对平台造成不利影响。所以,要制定严格的质量标准,加大检查与执法力度,平台应不断完善相应的售后机制,提升消费者获得感、幸福感。
其二,新闻传播主体继续呈现多元化特征,数字报纸面临更加严峻的竞争压力。CNNIC的数据显示,最近半年内,手机网民使用过的手机应用个数平均超过10个,手机软件的多样化促进了新闻获取渠道的多样化,也促使各个平台对移动新闻客户端的争夺进入白热化,其中人民日报、光明日报等传统媒体,新浪、搜狐等门户网站,以及没有任何新闻背景的今日头条、鲜闻等新闻聚合平台都纷纷推出移动新闻客户端。随着互联网“去中心化”的发展,网民通过微博、微信等社交平台都可以成为新闻提供商。新闻来源的多元化使得传统媒体的数字报纸优势减弱,竞争压力更加严峻。
2.4 优化问题建立
结合式(21),式(24),式(27)和式(28),抗多主瓣干扰的相位编码信号s和失配滤波器h的设计问题可表示为
s.t. |hHh-Ns|≤γ1
(26)
式中:λ1、λ2为预先设定的权系数。由于向量e包含ω(0)-Ns,所以将式(23)的第2个约束省略了。
3 发射波形与接收滤波器联合认知设计优化问题求解
3.1 优化问题转化
由于式(26)的优化问题是非凸、非光滑并且带约束的,比较难求解。因此,需要将优化模型转化,可利用罚函数法,将公式转化为

2.1 病例组与对照组治疗前各指标的比较 治疗前病例组与对照组比较:两组的年龄、血糖、三酰甘油、总胆固醇、HDL、LDL、凝血酶原时间等差异无统计学意义(P>0.05),见表1。
(27)
式中:向量x∈CNs+2Nh是由向量φ、a和θ按顺序构成的列向量,表示为
x=[φ1,φ2,…,φNs,a1,a2,…,aNh,θ1,θ2,…,θNh]T
(28)
