基于RecurDyn 履带机器人的结构设计和动力学仿真
2023-10-29吴朝阳谢占山
吴朝阳,谢占山
(1.226019 江苏省 南通市 南通大学 杏林学院;2.226019 江苏省 南通市 南通大学 机械工程学院)
0 引言
履带式底盘是最常见的移动机器人,适用于复杂的路面工况。为获取研究所需的动态性能,使用以及开发和调试移动机器人,特别是履带车辆的控制算法,传统方法与实际相结合实验时间长、成本高[1-4]。吴子岳等[5]提出一种适用于丘陵山区农用机械的履带底盘设计方案,对履带底盘直线、爬坡和越障行驶过程进行了仿真分析;高亚东[6]结合履带机器人的工作环境,提出一种利用丝杠实现变节的三节六履式移动机器人设计方案;刘路等[7]提出一种基于降维变系数的滑模控制方法,实现对三维崎岖路面履带机器人的运动控制。对履带机器人的结构设计及控制等方面的研究也取得了较丰硕的成果[8-11]。鉴于虚拟样机技术的快速发展,利用该技术能对复杂机械系统进行快速建模,提高机器人运动计算、测试效率[12],缩短产品开发周期、降低成本。
相较于传统的轮式移动机器人,履带式移动机器人以其优良的地形适应能力和运动性能得到了广泛应用。履带机器人大致分为单节式、双节式、多节式3 种。单节式结构简单,在越障时难以发挥优势;多节式灵活度高,但功耗大,控制困难,且越障时稳定性不高。鉴于此,本文以双节四履式履带机器人为研究对象,其越障性能优于单节式,且越障时稳定性较高。通过RecurDyn 软件进行仿真分析,可以有效节约成本,并能获得实时数据,从而加快设计和开发,为产品具有较高的稳定性和可靠性打下基础。
1 履带式机器人的结构设计
履带底盘机构由履带、驱动轮、诱导轮、负重轮、张紧装置组成,常用于履带底盘行走装置主要有长方型、倒梯形型、三角型3 种[13],本文所研究的履带机器人的行走装置示意图如图1 所示。

图1 履带机器人的行走装置示意图Fig.1 Schematic diagram of walking device of tracked robot
图1 中:r1——驱动轮半径;r3——负重轮半径;h1——行走装置质心高度;l1——履带接地长度。整体设计的主要指标[14]包括:(1)整机空载质量≤300 kg,满载质量≤400 kg;(2)正常行驶速度为2~4 km/h;(3)在松软路面具备较好的通过能力,满载接地比压<30 kPa;(4)具备较好的爬坡越障能力,最大爬坡角度≥20°,可跨越壕沟宽度≥0.5 m;(5)操纵方式简单且能灵活转向,具有较小的转向半径。
1.1 最大越障高度
履带的越障高度以履带重心达到障碍物的垂直线延长线计算,越障示意图如图2 所示,其中H1为底盘的最大越障高度。由图2 几何关系可得最大偏转角θ和越障临界高度ha(θ)表达式[15]为
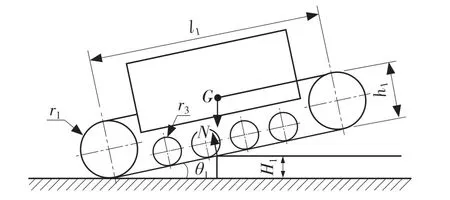
图2 越障示意图Fig.2 Schematic diagram of obstacle crossing
其中,偏转角度0 <θ<θ1。
1.2 最大跨越壕沟宽度
行走装置跨越壕沟示意图如图3 所示,可以分析出跨越壕沟时底盘发生倾翻、越障失败的临界点。为保证顺利通过,底盘重心应在壕沟边缘,且一端能接触到另一侧的壕沟边缘[16]。壕沟最大宽度L1的表达式为

图3 跨越壕沟示意图Fig.3 Schematic diagram of trench
1.3 履带的参数设计
考虑到工作环境恶劣,设计的履带应具有高强度和耐磨抗损坏能力。履带宽度b和接地长度l应满足式(4)和式(5)。
式中:λ——系数,取值0.18~0.28。许用接地比压
式中:mm——满载质量。
结合设计要求,履带车取值为
驱动轮半径计算公式为
导向轮用于引导履带式机器人运动,诱导轮直径r1计算公式[17]为
履带机器人的主要参数如表1 所示。

表1 履带机器人的主要参数Tab.1 Main parameters of tracked robot
2 建立履带机器人的动力学模型
LMTV 提供了履带系统所需的所有建模仿真模型,包括链轮、履带轮和履带,其中履带是由离散的钢履带板组成,为进行动态模拟试验,应在RecurDyn 中建立动态模型[18]。对三维模型进行模拟,移除与运动无关的零件,如螺母等。质心位置与三维模型一致,尽可能不影响模拟试验结果,首先由SoildWorks 建立整体模型,保存为X_T 模型导入RecurDyn,然后在特定坐标系建立履带系统组:履带、驱动轮、诱导轮、负重轮、惰轮以及张紧弹簧,最终完成履带子系统模型,如图4 所示。

图4 履带子系统Fig.4 Track subsystem
添加每个零部件之间的运动关系,如表2 所示,建立与地面的约束关系设置摩擦因数[19-21]。经过大量仿真试验,建立履带机器人的动力学模型,如图5 所示。

表2 零部件之间的运动关系Tab.2 Motion relationship between parts

图5 履带机器人动力学模型Fig.5 Dynamic model of tracked robot
3 仿真实验分析
3.1 越障仿真分析
主要分析了以下问题:(1)机器人越障是否会出现卡死在角落等问题;(2)张紧轮的预紧力是否设置合理;(3)带轮是否会脱落。
系统参数的合理设置至关重要,主要参数有:弹簧刚度、地面接触参数、机器人速度、最大爬坡高度、整机质量等。进入驱动轮设置,添加STEP函数,设置驱动函数为:EP(TIME,0.5,0,2,300D)-step(time,4,0,10,300d),经过多次仿真实验与参数调整,最后成功到达最高障碍,如图6 所示,障碍物的高度为350 mm。

图6 履带机器人跨越楼梯Fig.6 Tracked robot crossing stairs
3.2 仿真结果分析
设置仿真时间为8 s,步数1 000,仿真得到如图7 所示的曲线。由图7(a)可知,3.0~5.5 s 时,在弹簧作用下覆带所受拉力增大,以抵抗越障时受到的冲击。

图7 车辆速度、拉力弹簧、偏航角的变化曲线Fig.7 Variation curves of vehicle speed,tension spring and yaw angle
图7(b)为重心方向的加速度,可见,只有在越障时加速度会突然变大,其它时刻都保持良好的稳定性;由图7(c)所示偏航角度变化可知,越障完成之后,角度没有因巨大的冲击而出现太大变化,只偏移了0.4°,说明履带车在越障高度约为350 mm 时具有良好的越障性能。
4 结语
本文对履带机器人进行结构设计和越障仿真,采用RecurDyn/Track LMTV 获得速度、偏航角及弹簧拉力等仿真数据,总结如下:(1)在传统履带机器人机构基础上,增加诱导轮张紧装置,实现了越障的稳定性;(2)合理设置RecurDyn 仿真参数进行实验仿真,得到一系列姿态数据,为后续设计提供有效支撑;(3)通过RecurDyn 仿真软件开发履带机器人能获得实时仿真数据,加快了设计进程,可节约成本,使产品具有比较高的稳定性和可靠性。
