基于光敏二极管传感器三维阵列的光伏跟踪误差检测研究
2023-10-28唐梓彭魏超上官炫烁张骏何梓瑜许耀华
唐梓彭 魏超 上官炫烁 张骏 何梓瑜 许耀华

摘 要:光伏跟踪系统可提高光伏发电系统的发电效率,但由于光伏跟踪系统的运行机构及运动控制算法等存在不稳定性,常会导致其运行效果不理想,跟踪精度难以保障。为实现光伏跟踪系统跟踪误差的现场检测,设计了一种基于光敏二极管传感器三维阵列的光伏跟踪误差检测装置,该装置主要包括1个由多个光敏二极管传感器以三维阵列规则镶嵌构造的圆球体和主控制系统等;并设计了基于激光水平仪的传感器标定方案,实现传感器初始值偏差校正,提升检测装置一致性,实现对单轴或双轴光伏跟踪系统跟踪误差的自动检测。经设备试制及测试验证,结果表明:该检测装置可满足光伏跟踪系统跟踪误差检测精度需求,能够准确在线检测单轴、双轴光伏跟踪系统在不同情况下的跟踪误差。
关键词:光伏跟踪系统;跟踪误差;光敏二极管传感器;三维阵列;初始值标定;检测
中图分类号:TK519 文献标志码:A
0 引言
2020年9月22日,习近平总书记在第75届联合国大会上宣布中國要奋力2030年实现碳达峰、2060年碳中和战略目标,这是党中央做出的重大战略决策[1-2]。2021年3月1日,国家电网公司发布其《“碳达峰、碳中和”行动方案》,该方案提出在能源供给侧构建多元化清洁能源供应体系,大力发展清洁能源,加快太阳能热发电技术推广应用,最大限度开发、利用风能、太阳能等新能源[3]。
传统的光伏发电系统多采用固定倾角安装光伏组件,但太阳光照射角度每时每刻都在变化,采用光伏跟踪系统能够有效提升光伏发电系统的发电效率,从而提高发电量。但由于光伏跟踪系统的机械结构、传动系统、控制系统等存在一定的不稳定性及故障率,导致光伏跟踪系统在运行中会出现跟踪误差,不仅影响光伏组件接收的太阳辐照量,也存在安全隐患。
随着中国越来越多的光伏发电示范项目采用光伏跟踪系统,在现场运行场景下对光伏跟踪系统的跟踪误差和偏离程度进行检测分析的需求度也日益提升。这种需求度主要体现在:一方面,需要可靠的检测方法及装备,以准确排查光伏跟踪系统运行问题,辅助光伏电站的检修运维工作;另一方面,通过检测分析手段,将光伏跟踪系统运行性能数据反馈给设备供应商侧,可促进光伏跟踪系统稳定性与跟踪精度的优化和提升,有助于此类系统进一步推广应用,实现光伏电站从采用固定式支架系统向采用高效的光伏跟踪系统的转变。
现有的光伏跟踪系统产品多依照UL2703、UL3703进行型式试验及认证,但在现场运行场景下很难进行跟踪误差的检测分析。GB/T 29320—2012《光伏电站太阳跟踪系统技术要求》中,针对光伏跟踪系统的相关型式、性能、安全性等方面规定了具体的检测要求,但多基于实验室环境,并不完全适用于光伏跟踪系统现场运行场景下的检测或故障诊断。上述国际标准及国内标准中针对光伏跟踪系统跟踪误差检测的方法有针孔法、角度尺及水平角度仪法[4]。但这些方法目前既缺乏具体设备技术要求,也缺乏系统性的检测评估方法支撑,均不适合在光伏跟踪系统现场运行场景中直接应用。
国外针对光伏跟踪系统的研究起步于20世纪60年代,目前已成功进行了商业应用[5]。国内对光伏跟踪系统的研究多针对此类系统的系统设计、跟踪策略优化、太阳方位检测与跟踪等方面[6],对于其在现场运行场景下的跟踪误差检测及故障诊断分析则少有涉及。
马桂龙等[7]提出了一种基于自适应预测算法的光伏阵列最大功率点跟踪技术,在扰动观察法的基础上引进自适应预测的方法,以提高跟踪速度,达到快速稳定地实现光伏阵列最大功率点的跟踪。但是该方法在现场检测中,难以便捷快速地检测跟踪误差。张海昇等[8]提出了基于平顶锥形传感器的光伏组件方位检测系统,利用光电传感器检测被测光伏组件是否正对着太阳方位,产生电信号驱动跟踪器修正方位,其利用被动跟踪原理检测跟踪器的跟踪误差,光伏跟踪系统的现场检测中可借鉴此方法。
本文在上述研究基础上,设计了一种基于光敏二极管传感器三维阵列的光伏跟踪误差检测装置,并进行了试制,该装置能够对光伏跟踪系统的跟踪误差进行自动检测,并能实现流程自动化、数据可视化,脱离依靠人工观察判断的模式,提升现场检测效率与精度;同时,设计了基于激光水平尺的光敏二极管传感器初始偏差校正方案,以提高传感器检测的一致性。
1 基于光敏二极管传感器三维阵列的光伏跟踪误差检测装置设计
1.1 工作原理与设计
本文从现场检测光伏跟踪系统跟踪误差的角度出发,设计一种能满足一定检测精度要求的基于光敏二极管传感器三维阵列的光伏跟踪误差检测装置。该装置主要包括1个由多个光敏二极管传感器以三维阵列规则镶嵌构造的圆球体和主控制系统,通过主控制系统中的信号处理和数据分析模块及可视化模块,可实现流程自动化、数据可视化。利用激光水平仪搭建一个本检测装置的校准平台,完成传感器的初始偏差校准,保证传感器在可测范围内的一致性。
光伏跟踪系统包括单轴光伏跟踪系统和双轴光伏跟踪系统两种。采用单轴光伏跟踪系统时,光伏阵列仅可围绕一个旋转轴旋转,旋转轴可采用南北方向、东西方向或与地平面垂直等布置方式;光伏阵列仅能跟踪太阳方位角或太阳高度角的变化,因此,太阳光线入射角不能减小到零。采用双轴光伏跟踪系统时,光伏阵列有两个旋转轴,可同时跟踪太阳的方位角与高度角的变化,能完全跟踪太阳运行轨迹,使太阳入射光线始终垂直于光伏阵列。本文拟实现对单轴、双轴光伏跟踪系统跟踪误差均能自动检测的装置设计。
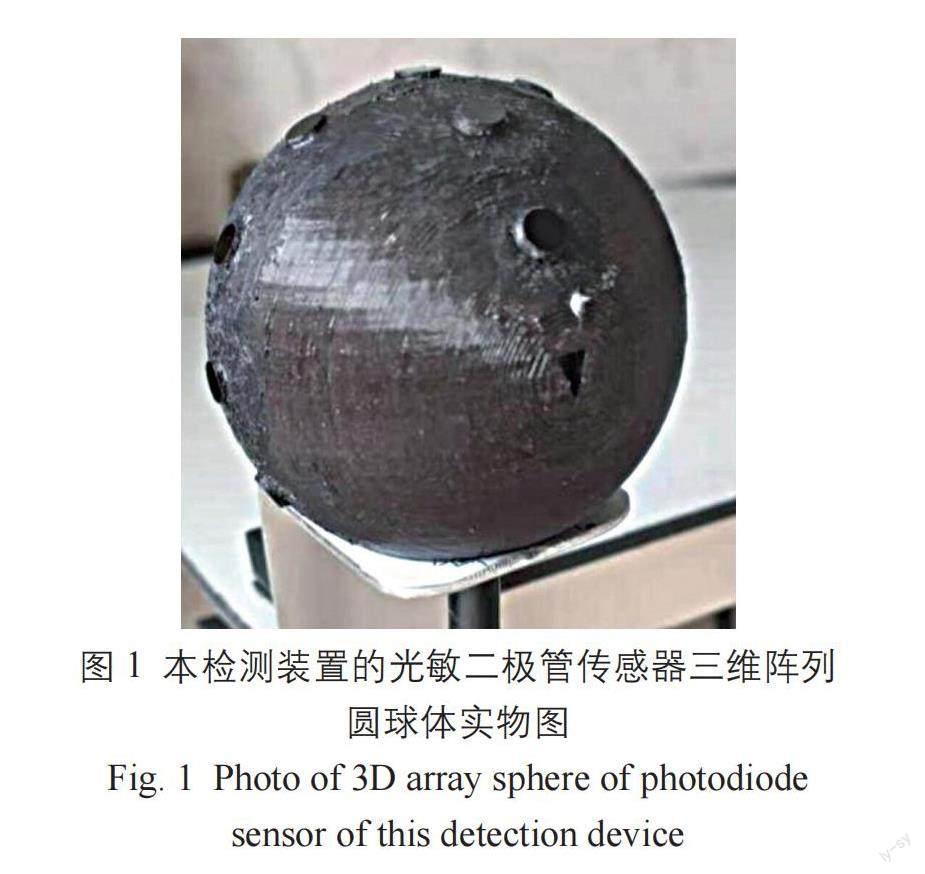
本检测装置的光敏二极管传感器三维阵列圆球体实物图如图1所示。该装置采用三维立体结构的目的是提高装置的检测精度和灵敏度,并实现对单轴和双轴光伏跟踪系统跟踪误差的检测。在设计的球形结构表面间隔90°的两条经线上,沿弧形均匀间隔布置一定数量的光敏二极管传感器,以保证在经线方向和纬线方向上都达到检测精度0.5°的目标。有光敏二极管传感器的两条圆弧所在的直径面相互垂直,且两个直径面均与检测装置的底平面垂直。
测试实验中,通过对不同太阳光入射角条件下检测得到的传感器电信号输出进行对比整理,形成太阳光入射角偏差值与电信号对应表。
1.2 跟踪误差检测方法
检测装置包括沿纬线布置的东西方向光敏二极管传感器,用于检测该方向的跟踪误差;还包括沿经线布置的太阳高度角光敏二极管传感器,用于检测南北方向的跟踪误差。经、纬线相互垂直形成的光敏二极管传感器三维阵列采集的光电信号经信号处理、模数转换 (AD转换)后送至主控制器,主控制器对采集的光电信号进行处理、判断后输出太阳的方位角和高度角数值[9]。
东西方向的光敏二极管传感器阵列在水平方位上覆盖220°夹角范围,从东向西均匀间隔布置光敏二极管传感器,编号为E1~E6及W6~W1。太阳高度角光敏二极管传感器阵列以球体赤道为中心覆盖90°夹角范围,可均匀布置4~6个光敏二极管传感器,当布置4个时,其由南向北的编号为Y1~Y4。
1.2.1 东西向太阳方位角的定位计算及判断步骤
1)粗定位:將光敏二极管传感器E3、W3采集到的信号值分别记为VE3、VW3,对VE3、VW3差值作判断:①若VE3–VW3>0,则说明太阳方位在东(E)侧,即在东至南范围内;②若VE3–VW3<0,则说明太阳方位在西(W)侧,即在南至西范围内;③若VE3–VW3=0,则说明此时太阳方位在E6和W6中间。
2)细定位:粗定位后,当太阳方位在E或W侧时,进行以下判定和计算。
①将光敏二极管传感器E2、E4、E5采集到的信号值分别记为VE2、VE4、VE5,当太阳方位在E侧时,作如下判断。
若VE2–VE4>0,则太阳方位角θ的计算式为:
式中:θE2为光敏二极管传感器E2测得的起始太阳方位角;20°为相邻光敏二极管传感器之间的固定角度。
若VE2–VE4<0,则太阳方位角的计算式为:
式中:θE4为光敏二极管传感器E4测得的起始太阳方位角。
②当太阳方位在W侧时,太阳方位角的判断方法与太阳方位在E侧时的判断方法相同。
1.2.2 南北向太阳高度角的定位计算及判断步骤
将光敏二极管传感器Y2、Y3采集到的信号值分别记为VY2、VY3;光敏二极管传感器Y1、Y4分别位于南回归线、北回归线一侧,其采集到的信号值分别记为VY1、VY4。比较VY2、VY3的大小,对差值作如下判断:
1)若VY2–VY3=0,则太阳高度角θY位于赤道中间;
2)若VY2–VY3>0,则太阳高度角的计算式为:
式中:θY2为光敏二极管传感器Y2测得的起始太阳高度角。
3)若VY2–VY3<0,则太阳高度角的计算式为:
式中:θY3为光敏二极管传感器Y3测得的起始太阳高度角。
1.2.3 计算结果处理
主控制器计算得到东西方向太阳方位角跟踪误差值和南北方向太阳高度角跟踪误差值,并输出至显示器和数据存储器。
2 本检测装置的实现及校准
本检测装置需具有单/双轴检测功能切换、采样周期(秒、分钟、小时)切换、暂停采样、数据显示、数据输出等功能。
2.1 主控制系统功能的设计
主控制系统主要包括主控制器及信号处理部分、人机交互模块。主控制器及信号处理部分主要由ARM处理器及数字参数存储等模块构成。主控制器采用型号为STM32F103的芯片,其可实现数据采集后的信号处理、AD转换、结果显示和外部数据存储等功能。
人机交互模块包含系统校准,单轴、双轴设置,采集时间设置等。其数据接口通信方式为USB2.0,存储介质为SD卡可移动存储。该模块可视化显示提供的数据信息有:单/双轴模式、偏东/偏西跟踪误差的检测结果数值、偏南/偏北跟踪误差的检测结果数值。主控制器同时接收主控面板上几个切换工作模式(单轴、双轴等的选择、采样周期设置等)的信息。
主控制系统的功能示意图如图2所示。
2.2 主控制系统软件的工作流程
利用光敏二极管传感器检测得到的数据,结合检测装置的单轴、双轴功能切换需求,设计如图3所示的主控制系统软件工作流程,逐一实现光敏二极管传感器初始化、检测装置算法处理、数据存储、检测结果可视化等功能。
2.3 本检测装置校准方案及实现
由于存在加工误差、元器件参数不一致等问题,需对光敏二极管传感器、信号放大器、AD转换器及偏转角度计算模块等进行校准及精度检测,因此搭建检测装置校准平台,该校准平台的示意图如图4所示。
校准方案的步骤为:
1)在暗室内的一个标准光学平台上固定安装本检测装置,并同光学平台处于同一水平面内。
2)用两台激光水平仪在光学平台上交叉出两个相互垂直的光面,标识出如图4所示的两个垂直光面的交叉垂直线。将光源球、检测装置放在该垂直线上,并保证二者的上下中心点垂直对准,此时光源中心点在检测装置的正上方,模拟太阳在传感器正上方90°,用来对传感器进行垂直方向(南北方向)的初始角度误差的测量、标定。
3)采用与步骤2)相近的方法,将光源球精确定位在光学平台的0°水平位置,对传感器进行东西方向的初始角度误差测量、标定。
4)以上初始值校准结果可通过主控制系统软件进行校准归零,从而保证传感器和检测装置测量的一致性。
传感器标定用激光水平仪的参数如表1所示。
将表1中正交精度指标3 m ±1 mm转换成角度表示,即,或arctan(1/3000)≈0.02°。同样,将水平、垂直精度指标5 m ±1 mm转换成角度表示,即,或arctan(1/5000)≈0.013°。由此可知,激光水平仪水平、垂直、正交精度都在0.02°以下,满足检测装置0.1°~0.5°检测精度的要求。激光水平仪实物图及实际的检测装置校准平台如图5所示。
经过搭建的检测装置校准平台的校准后,达到对传感器的标定,消除了检测装置试制过程中的加工偏差,保证了后续实验结果的一致性。
3 检测装置实验
为测试光伏跟踪误差检测装置,本文采用两种不同应用场景进行实验。一种场景是在地面固定平台下进行的太阳方位角静态检测实验,检测装置处于相对地面静止不动的状态,以检测太阳运行过程中检测装置的数据输出,标定检测装置数据输出基准,判断其能否达到预期误差检测精度。另外一种场景则是在真实的双轴光伏跟踪系统上固定检测装置,完成双轴光伏跟踪系统在跟踪条件下的跟踪误差动态检测,对应输出跟踪误差检测结果,并根据检测结果进行检测精度判别。
3.1 固定平台下太阳方位角静态检测实验
在太阳日照条件较稳定的室外环境下,将本检测装置固定在地平面,检测一定时间周期内太阳自然运转时引起的检测角度偏差值变化,以验证是否达到预期的角度变化检测精度。实验分为两个测试方向,先开展东西方向上的角度偏差检测测试,然后开展南北方向上的角度偏差检测测试。
3.1.1 东西方向太阳光入射角检测测试
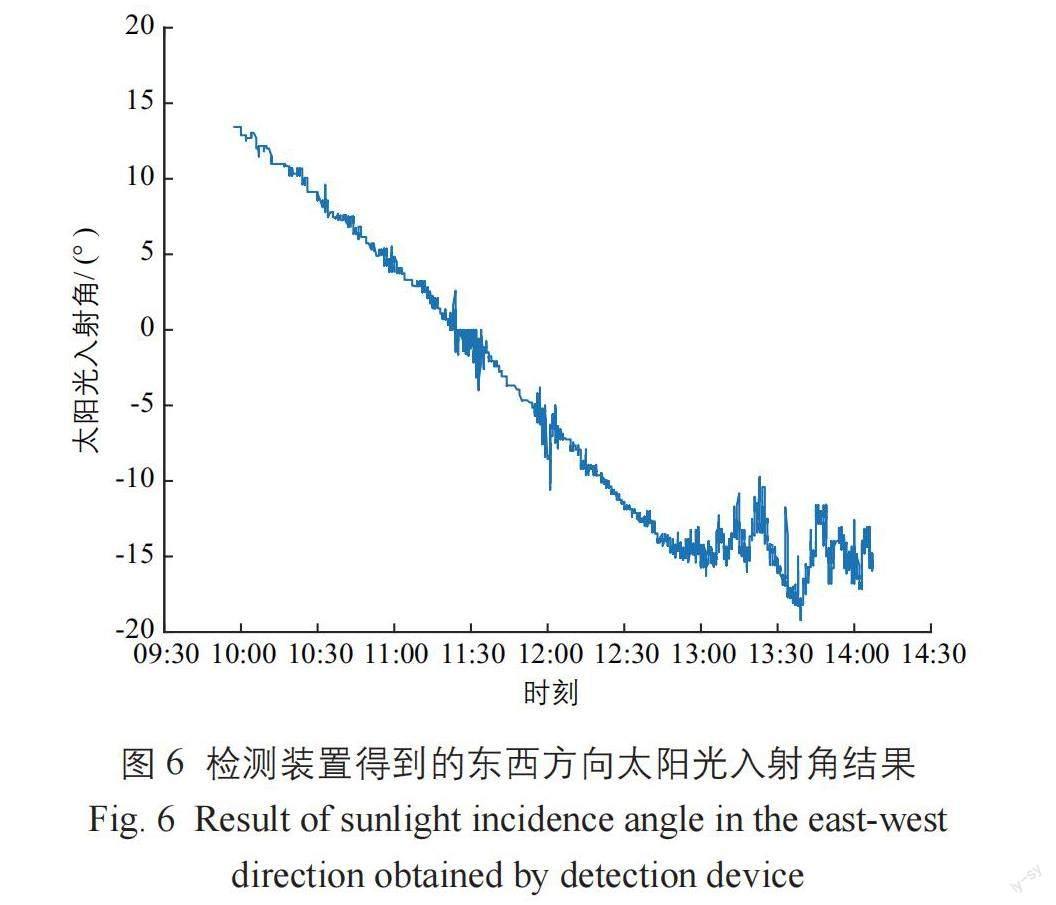
以固定平台(地面)为基础,利用本检测装置测试太阳光入射角,用于反映太阳方位角随时间的变化情况。将检测装置放置在太阳光下某个固定平面上,观察测量得到太阳光入射角变化的情况。选取测试当天09:57~14:07时间段检测装置得到的东西方向太阳光入射角结果,具体如图6所示。图中:正值表示太阳方位偏东,负值表示太阳方位偏西。
从图6可以看出:在测试当天,11:20之前太阳方位偏东;受检测装置摆放位置的地平面限制,在11:20之后,太阳方位角出现反转,太阳方位由偏东转向偏西。
随着太阳自然移动,记录各时间点东西方向太阳光线入射角数据,并与实测数据进行对比,发现检测装置的测试结果满足设计精度要求。
3.1.2 南北方向太阳光入射角检测测试
同样采用固定平台的方式,测试环境与东西方向测试时相同,在09:57~14:07测试时间段内,对检测装置测得的南北方向太阳光入射角数据进行了统计记录,得到南北方向的太阳光入射角曲线如图7所示。
将记录的各时间点南北方向太阳光入射角数据与实测数据进行对比,发现检测装置的测试结果满足设计精度要求。
3.1.3 静态检测结果
通过上文东西方向和南北方向两个测试方向的静态检测实验,完成了对检测装置中的传感器在双轴两个不同方向上的检测精度验证,保证检测装置在设计测量范围内,都能针对外界光线角度的微小变化输出对应的检测结果,从而保证在实际现场的单轴、双轴光伏跟踪系统的跟踪误差动态检测的可靠性。
3.2 单轴、双轴光伏跟踪系统的跟踪误差动态检测实验
在静态检测实验基础上,将本检测装置固定在真实的采用单轴或双轴光伏跟踪系统的光伏组件上,保证传感器底面平行于光伏组件玻璃板面,完成真正的在跟踪条件下的跟踪误差动态检测。选定单轴或双轴跟踪模式,实现户外环境中的测试验证。本次实验以双轴跟踪模式为例,在太阳光照射下,随着动态检测平台的追日运动,观察检测装置随着太阳移动时检测输出的太阳方位角及高度角跟踪误差结果,通过可视化电子屏幕输出测试数据。图8为某个测试瞬间的输出结果案例。
检测实验过程中,随着动态检测平台的追日转动运行,本检测装置检测到跟踪系统在东西向的跟踪误差较小,仅为0.13°,而南北向跟踪动作则有6.60°跟踪误差。检测装置实现了对光伏跟踪系统在经线与纬线方向跟踪精度的检测目的,输出的跟踪误差最小角度单位为小数点后两位。
切换单轴、双轴检测类别,即可以同样的方式完成单轴光伏跟踪系统的跟踪误差检测。
4 结论
本文针对光伏跟踪系统的现场检测需求,设计了一种基于光敏二极管传感器三维阵列的光伏跟踪误差检测装置,并进行试制,实现了对单轴、双轴光伏跟踪系统的跟踪误差、跟踪范围的实时检测分析,有利于在实际应用中提高现场运维人员对光伏跟踪系统运行状态与质量的掌握,了解设备运行偏差,现场检查光伏跟踪系统设备在存在偏差时的运行情况,提高设备可利用率,最终实现光伏电站发电量提升的目标,具有较好的工程应用推广价值。
[参考文献]
[1] 王永中.碳达峰、碳中和目标与中国的新能源革命[J].人民论坛·学术前沿,2021(14):88-96.
[2] 贾君. 以习近平生态文明思想引领东北碳达峰碳中和工作[N]. 中国环境报,2021-08-09(003).
[3] 《农村电工》编辑部. 国家电网公司发布“碳达峰、碳中和”行动方案[J]. 農村电工,2021(5):3.
[4] 中国电力企业联合会.光伏电站太阳跟踪系统技术要求:GB/T 29320—2012 [S]. [S. l.:s.n.],2012.
[5] 闫云飞,张智恩,张力,等.太阳能利用技术及其应用[J].太阳能学报,2012,33(S1):47-56.
[6] 李晶,窦伟,徐正国,等.光伏发电系统中最大功率点跟踪算法的研究[J].太阳能学报,2007(3):268-273.
[7] 马桂龙,付青,陈淑华.基于自适应预测算法的光伏系统MPPT技术研究[J].太阳能学报,2012,33(12):2062-2067.
[8] 张海,韩春成,王斌,等.基于平顶锥形传感器的光伏组件方位检测系统[J].中国农机化学报,2015,36(6):281-285.
[9] 王金平,王军,张耀明,等. 槽式太阳能聚光器跟踪系统运行特性分析[J]. 太阳能学报,2016,37(12):3125-3131.
PV tracking error detection based on 3D array of photodiode sensors
Tang Zipeng1,Wei Chao1,Shangguan Xuanshuo1,Zhang Jun1,He Ziyu1,Xu Yaohua2
(1. Huadian Electric Power Research Institute Co., Ltd., Hangzhou 310030,China;
2. Anhui University,Hefei 230601,China)
Abstract:PV tracking system can improve the power generation efficiency of PV power generation system. However,due to the instability of the operating mechanism and motion control algorithm of the PV tracking system,its operation effect is often not ideal,and the tracking accuracy is difficult to guarantee. In order to realize the on-site detection of the tracking error of the PV tracking system,this paper designs a PV tracking error detection device based on the 3D array of photodiode sensors. The device mainly includes a spherical body composed of multiple photodiode sensors reqularly inlaid in a 3D array and the main control system;A sensor calibration scheme based on the laser level is designed to realize the correction of the initial value deviation of the sensor,improve the consistency of the detection device,and realize the automatic detection of the tracking error of the single-axis or doute-axis PV tracking system. After the trial production and test verification of the equipment,the results show that the detection device can meet the tracking error detection accuracy requirements of the PV tracking system,and can accurately detect the tracking error of the single-axis or double-axis PV tracking system under different conditions online.
Keywords:PV tracking system;tracking error;photodiode sensor;3D array;initial value calibration;detection