多角度共CCD 光谱仪探测系统设计
2023-10-28岳昊天焦瑞莉段民征
岳昊天,焦瑞莉,段民征
1.北京信息科技大学 信息与通信工程学院,北京 100101;2.中国科学院大气物理研究所,北京 100029
0 引言
光谱测量是实现大气要素遥感的主要手段,而多角度是提高大气光学遥感产品质量和探测效率的重要途径。光谱探测技术已经发展多年并取得了很大进展。MISR[1]同Terra 卫星进入太阳同步轨道,其9 个望远镜可从不同角度对太阳光谱进行探测。欧空局通过 ENVISAT-1 卫星将SCIAMACHY[2]送入轨道,其可在紫外、可见光、短波红外进行太阳光谱的探测。POM[3]是由日本PREDE 公司生产的太阳光度计,其可在紫外、可见光和近红外波段进行测量。在近红外波段,CE318[4]在340 ~1 020 nm 范围内有8 个带宽为10 nm 的探测通道,可测量太阳在可见光与近红外波段上不同时间、波段。
现有的遥感仪器在光谱仪探测方面存在局限性。首先,受探测模式局限性和高成本等因素的影响,对光谱的探测目前很难实现全球大范围布网与全天候探测;其次,由于不同大气要素资料来自于不同的探测设备,因此,探测模式和探测时间无法保证一致性,很难实现多角度的同步探测;最后,现有的地基遥感仪器很难在单一探测中实现高光谱分辨率的同时,连续获得多个独立的信息量[5-8],导致大气参数的反演误差很大。
基于以上问题,本文提出一种多角度共CCD(Charge Coupled Device)光谱自动探测系统设计。光谱仪自动探测系统分为硬件和软件两部分[9-10]:硬件部分由多角度采光系统、光谱采集系统、自动观测控制系统组成;软件部分包括可视化操作界面与后台程序。通过上位机的控制软件可以实时控制硬件系统,进而完成自动化多角度的高分辨率光谱探测。本系统成本较低,扩展性良好,可以实现不同吸收带的多角度高分辨率瞬态成像自动探测,对提高大气综合探测水平有重要意义。
1 系统原理
1.1 系统总体方案
多角度共CCD 光谱仪自动化探测系统由采光镜头、光纤、相机探测器、精密太阳跟踪转台、三光栅光谱仪和程序控制计算机组成。多角度光谱仪探测系统的总体结构设计如图1 所示。自动化光谱仪探测系统以多角度前置采光镜头系统作为前端输入,负责接收光信号,配合太阳跟踪转台对太阳跟踪,光信号经过采光镜头之后沿着光纤传入三光栅光谱仪中,再经过内部光学系统,最后由相机进行探测,计算机对接受到的光谱信息进行采集、显示、储存及处理。

1.2 采集原理
采光镜头将收集到的光信号汇聚到光纤上,光纤的前端连接采光镜头底部,后端连接光谱仪的入射狭缝;待测光信号由前置采光镜头采集后,经光纤传到入射狭缝,再到光谱仪的光栅模块,在光栅的色散作用下,光信号按波长分散为多条光束照射在CCD 上,将光信号变为模拟电信号;电信号再经过前置放大器、积分器、A/D 转换器后转换为数字信号,最终经过数字处理器之后由计算机输出显示、处理及保存。光谱仪系统的探测原理如图2 所示。

1.3 吸收带原理
位于758 ~778 nm 波长范围内的氧气A 吸收带具有动态范围大、谱线分布规则的特性,在该波段范围内,除了氧气,基本上没有其他气体吸收线的干扰,因而属于非常“干净”的氧气吸收带[11]。同时,氧气在大气中具有分布均匀、混合比恒定的特性(占20.95%),因此,基于氧气A 带波段的吸收与后向散射辐射可以进行地表压强、气溶胶光学厚度、大气压力廓线、高层大气温度廓线、地表反照率、云顶高度及云光学厚度反演等一系列观测应用[2]。位于820 nm的水汽吸收带吸收也很纯净,且在高光谱分辨率条件下,其吸收动态范围也有利于地基水汽遥感[13]。研究表明,820 nm 波段附近通道的辐射信号包含有整层大气中的水汽信息,可以使用该通道探测大气中的水汽含量,并且,820 nm 水汽吸收波段与氧气A 带波长相近,更有利于探测。氧气A 带和820 nm 水汽吸收带的相对吸收率和波长的关系如图3 所示。

1.4 多角度探测原理
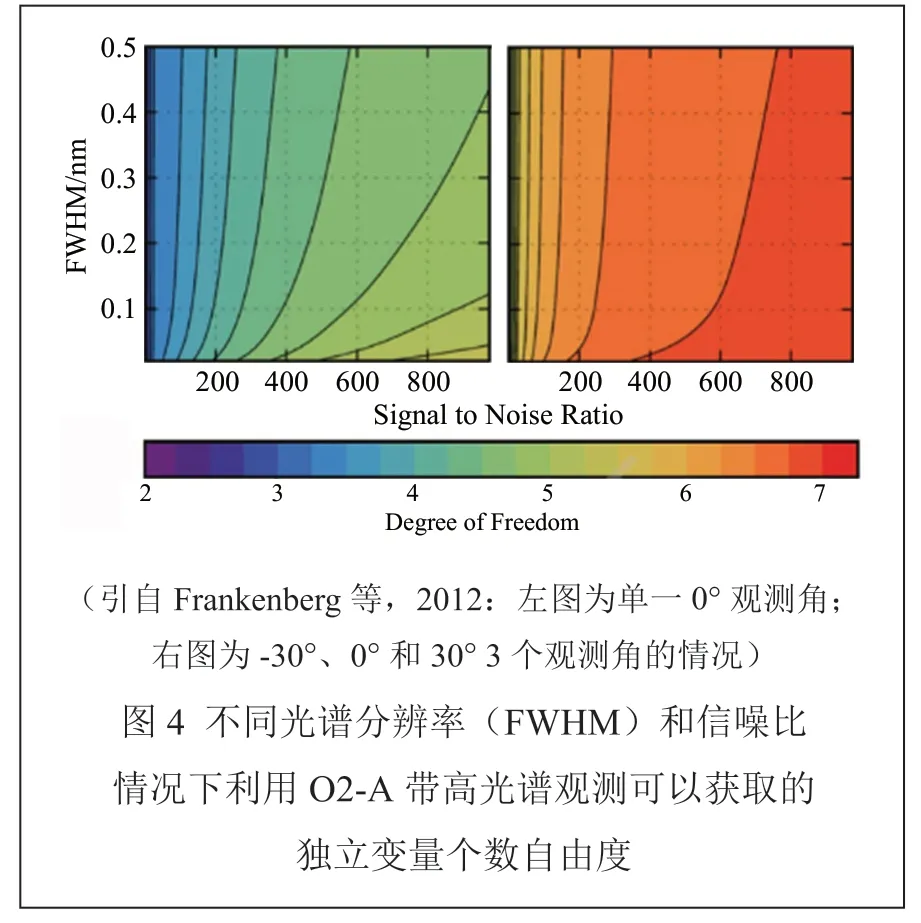
地球大气环境复杂,不同的角度探测,气溶胶等悬浮在空气的颗粒会反射不同的光,光信号会携带大气中不同的参数信息,单一角度探测对气溶胶粒子有效半径敏感,而多角度探测可以提供粒子分布的有效方差及更多的关于气溶胶廓线信息,获取更多的独立信息量,而且不同的观测角度,对于同一波长而言,其最佳敏感高度亦不同。由图4 自由度分析可知,在相同光谱分辨率和信噪比情况下,多角度观测比单一对地观测角度所获取的信息多。
2 光谱仪探测系统的光机电设计
多角度共CCD 光谱仪自动化探测系统硬件部分由多角度前置采光镜头、高精度三光栅光谱仪、精密太阳跟踪转台及相机组成。在支撑框架上分别安装4 个前置采光镜头,每个镜头都装有平行光路望远镜,其中1 号镜头的光轴与精密太阳跟踪转台的水平位置平轴,作为中心镜头,其他3 个镜头的光轴与中心镜头光轴成20°、40°、60°夹角。支撑框架固定在太阳跟踪转台的安装平板上。4 个前置镜头通过光纤导入到三光栅光谱仪的入射狭缝处,经过光谱仪内部的准直镜、光栅、校正器、成像镜,最后聚焦于面阵相机探测器的焦平面上,实现对太阳各个角度散射光谱的成像探测。
2.1 多角度探测设计
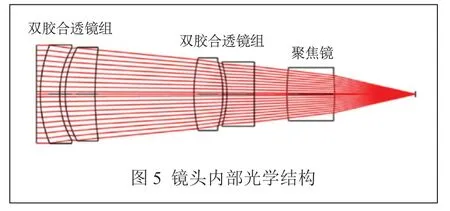
光谱仪探测系统采用的每个镜头的瞬时视场角为1.5°,系统采用一个双胶合的消色差透镜组将系统色差消除,通过焦距的设计,使得视场内的光线全部汇聚到匀光器前端面上,匀光器将接收到的视场内的光线匀化后,在后端输出,然后由光纤接收,再由光纤输入到光谱仪中,镜头的内部光学结构如图5 所示。
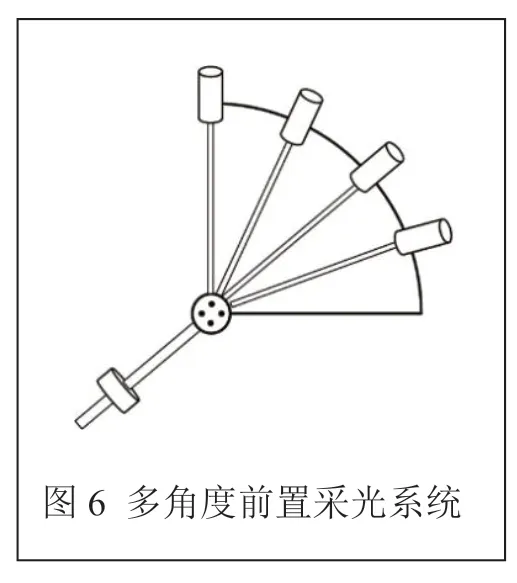
为实现多角度共CCD 的瞬态成谱测量,借鉴了昆虫复眼结构,在同一支撑架上设置4 个参数相同的前置采光镜头,其优势是使采集的光照信息更加丰富,4个采光镜头可以在任一角度同时采集,减小单一镜头带来的误差,每个镜头之间的夹角为20°,排列在支撑架上,支撑架保持良好的位置精度,如图6 所示。可以根据需要适当增减镜头,最终形成一个整体的多角度前置采光系统,每个镜头可以分别适用于不同的光谱测量和探测方向,并将各方向的光子能量精确地汇聚到光纤,经光纤束把不同方向的光引导到光谱仪狭缝所在的不同位置,然后多路光纤光源经光栅色散分波长成像在CCD不同位置,从而实现多角度光谱的同步测量。具体光纤排布如图7所示。

2.2 光谱采集设计
经过筛选与调研,选取IsoPlaneSCT320 光谱仪。与传统光谱仪相比,其像散为0,光谱分辨率高,信噪比与灵敏度较好,并且在SCT320 光谱仪内装配上3 块光栅,可以在不同分辨率下以极低的光噪声从UV(紫外)到NIR(近红外)进行操作。为消除弥散效应,引入了天文成像观测中的Schmidt 校准器,使色散光线在CCD 边缘成像质量也得到较大提升,从而提高光子量化效率和光谱分辨率,有效降低光谱混叠效应。
为了探测和记录光谱的位置与强度,还需选择合适的相机作为成像探测器。由于本系统采取了4 个前置采光镜头,因此选择面阵CCD 相机,另外,为了兼顾信噪比与光谱分辨率,要求在信号值较小的情况下拥有较大的动态范围,因此选择背照式相机。经过调研,最终决定采用Pixis_1024BRX 相机作为成像探测器,该相机是一款背照式面阵CCD 探测器,像素为1 024×1 024,量化位数为16 bit,像元尺寸13 μm×13 μm,具有低暗电流、高量子效率的特点。
2.3 自动化探测设计
为了实现太阳直射的多角度同步测量,还需配置精密太阳跟踪转台。太阳跟踪转台通过方向角与高度角的旋转,可以实现不同探测角度下跟踪太阳光的功能,因此,拟研制二维转动平台与自动控制软件来实现自动跟踪。由于采用了精密结构,跟踪精度优于0.1°。
3 光谱仪探测系统的软件设计
多角度共CCD 光谱自动探测系统软件的设计主要用于实现不同波段、不同吸收带的多角度高分辨率瞬态成像的自动化探测,对采集的图像进行存储、实时显示、处理,最后通过谱线数据进行分析与对比。
通过C++与MATLAB混合编程来实现软件设计。一般来说,常用的界面程序开发包括Qt、Python、MATLAB 等,而Qt 编译效率较低,Python 在调用C++语言时会存在不便捷的缺点,因此,本软件采用MATLAB 开发环境进行开发。最新的MATLAB 不再使用过去版本的GUI,而是采用一种全新的图形用户界面——App Designer。MATLAB 通过C-MEX 函数可以快捷地将C++与MATLAB 结合。采用MATLAB用于编写用户界面、太阳跟踪转台模块、光谱仪模块、数据处理、数据分块及感兴趣区域(ROI)模块,C++用于编写相机模块。
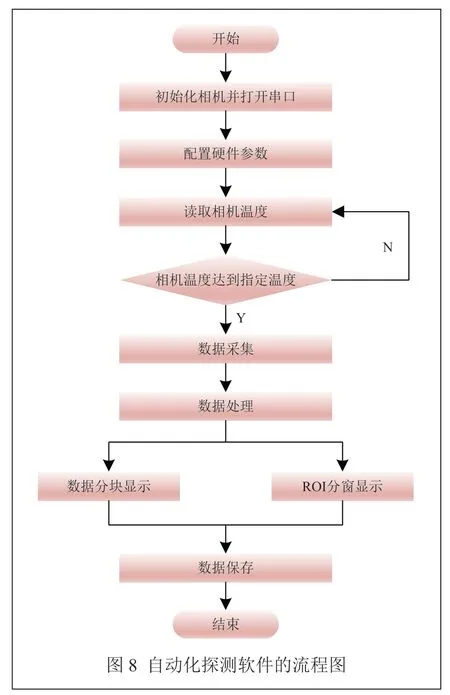
本软件功能:通过软件实时控制3 个硬件设备,并使它们可以协同工作,进而完成对光谱数据的多角度采集,最后对数据进行保存、显示与处理,实现氧气A 带与水汽吸收带的高分辨率瞬态自动化探测。自动化探测软件的流程图如图8 所示。
3.1 数据采集设计
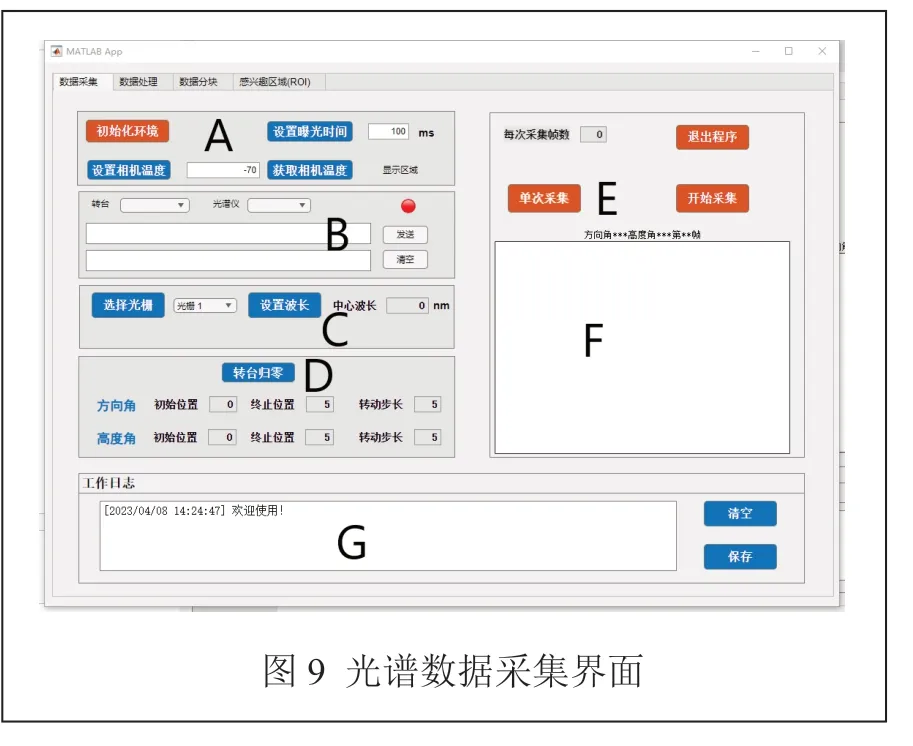
依据设计要求,光谱数据采集界面设计如图9所示。
3.1.1 相机模块
初始化环境:首先将相机环境初始化,并且同时打开光谱仪和转台两个串口,使其同步工作,初始化之后,相机功能可以正常使用,且串口灯变绿。
设置曝光时间:设置相机的曝光时间。
设置温度:控制相机CCD 传感器的温度,使相机对CCD 阵列进行冷却。
读取温度:设置完相机CCD 传感器温度之后,实时读取传感器的温度,没有达到指定温度之前,不可以进行任何操作;当达到指定温度后,相机可以开始工作。
3.1.2 串口配置
三光栅光谱仪模块和太阳跟踪转台模块都是通过RS-232 与计算机进行通信,二者串口配置参数相同,通过对应的串口指令可以直接控制。RS232 串口配置如表1 所示。
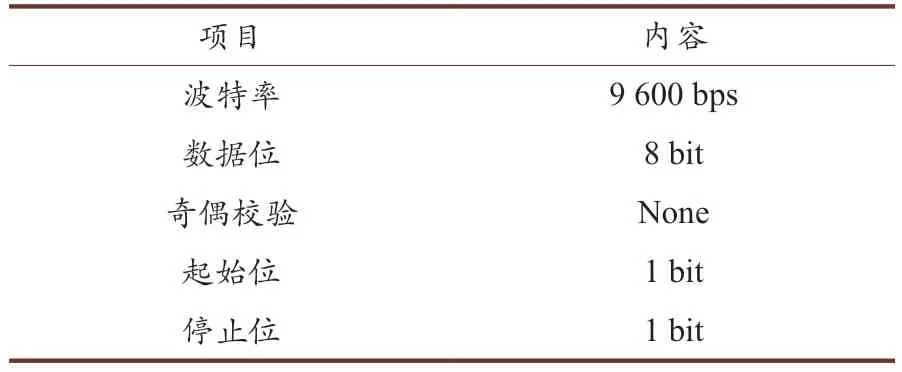
表1 RS-232 串口配置
3.1.3 光谱仪模块
设置光谱仪的中心波长以及选择当前工作的光栅(1 ~3 号)。
3.1.4 太阳跟踪转台模块
可以对转台进行归零操作,并且可以设置转台的方向角和高度角的初始位置、终止位置及转动步长,使跟踪转台可以根据设置的参数进行自动化转动。
3.1.5 采集模块
根据需求选择单次采集或者多次采集。
3.1.6 显示界面
将采集的图像实时显示到界面。
3.1.7 工作日志
将每次操作的步骤与时间记录下来,可以进行保存与清空,方便后期处理。
3.2 数据处理设计
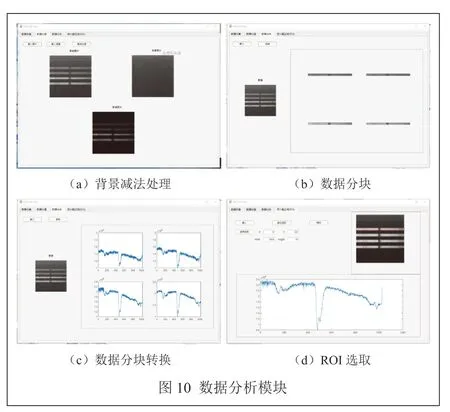
在进行光谱图像数据采集之后,可以根据需求对图像进行背景减法处理来实现图像的背景校正,目的是最大限度地减少信号中恒定背景及暗电流噪声的影响,从而使低强度信号更加明显。背减处理会减去信号中的恒定背景,包括由控制器中的放大器系统引起的恒定偏移以及暗电荷的时间相关积累,如图10(a)所示。
由于4 个镜头采集到的4 条光谱在一幅图像里,为了更好的数据对比,将4 个镜头采集的光谱数据分别单独显示到不同区域,如图10(b)、(c)所示。
当选择ROI 开窗时,软件的感兴趣区域(Region Of Interest,ROI)功能可以将1 024×1 024 按照使用需求进行不同尺寸的开窗,自定义选取感兴趣的区域,方便数据的采集和处理。根据提前设置的宽度、高度及坐标位置,自动生成相应的区域。如图10(d)所示。
4 系统联调及测试
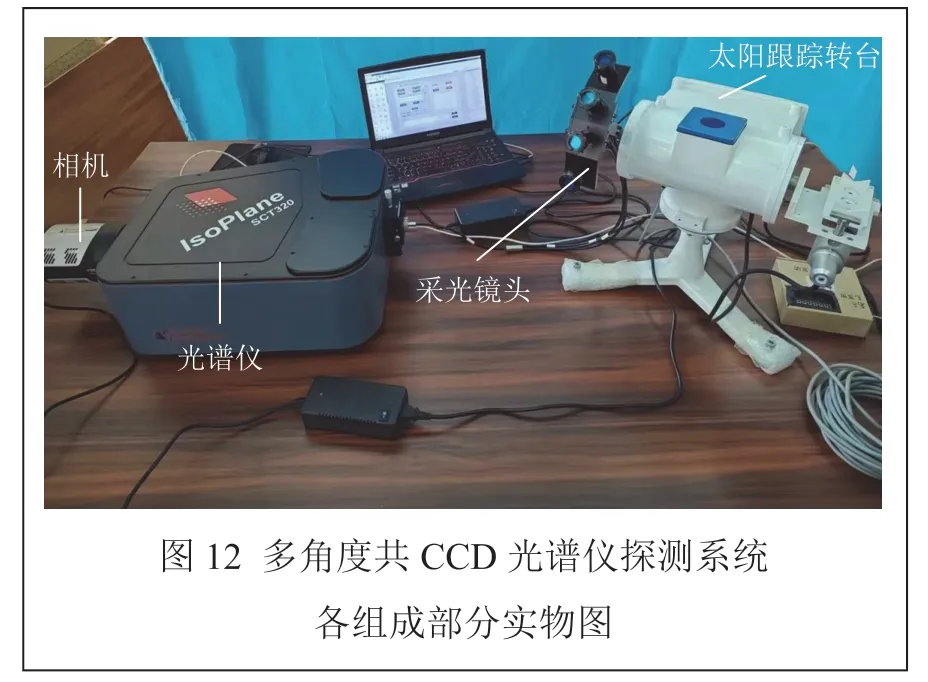
首先将光纤后端通过光纤底座与光谱仪的入射狭缝进行连接,光纤前端连接到多角度前置采光镜头系统,4 条光纤分别连接到4 个采光镜头,分别传输4 个角度光信号。采光镜头系统固定到太阳跟踪转台的安装平板上,通过法兰将相机安装到光谱仪的出口狭缝处,将光谱仪、相机、转台连接到计算机并通电。使用室内自然光作为输入光源,入射光由前置采光镜头采集,经光纤进入到光谱仪,然后通过计算机软件程序控制相机对接受到的信号进行采集与显示,并通过分析确定光谱图像在相机探测器上的位置,保证光谱仪的光轴与CCD 相机的中心像素平齐,使出射光束垂直与水平对准。确定好图像位置之后,将光谱仪中心波长设置为0 nm,通过调节光谱仪入射狭缝处的千分尺,使4 块相同的亮斑均匀显示在探测器的像面上,如图11 所示。多角度共CCD 光谱仪探测系统整机集成以后如图12 所示。

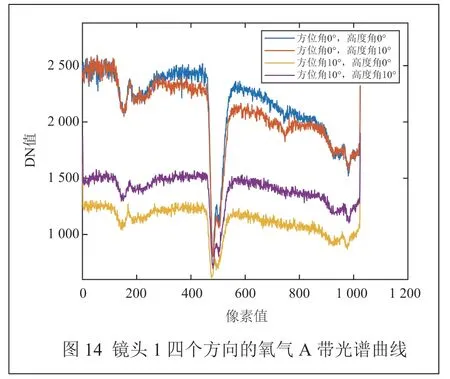
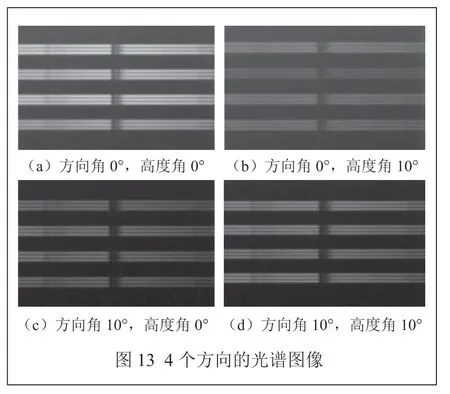
将中心波长调到760 nm,设置相机温度为-70 ℃,曝光时间为100 ms,采集帧数为1 帧,设置转台的方向角和高度角的初始角度为0°,终止角度为10°,步长为10°,开始采集。采集的光谱图像如图13 所示。
为了统一,取每幅图像的第一条亮带(即镜头1)进行研究,并将其转换为以像素值为横轴,DN 值(灰度值)为纵轴的曲线,如图14 所示。
为了分析系统观测结果的准确性,利用Princeton 公司官方采集软件——LightField 采集的光谱曲线进行对比,结果如图15 所示。
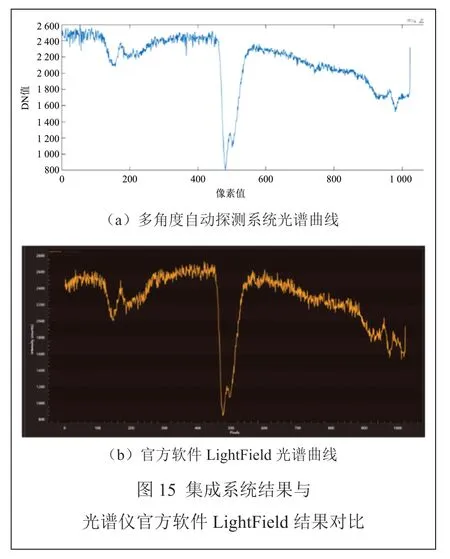
测试结果表明,多角度自动探测系统得到的吸收光谱曲线和官方软件LightField 得到的吸收光谱曲线相似,可以作为光谱探测的工具。
5 结束语
本文提出一种多角度共CCD 光谱仪自动化探测系统设计,该系统可实现一次扫描瞬态获取多个角度(多个方向)的大气辐射独立观测量,再经过光谱分光系统和采集系统,从而实现一次扫描多个方向的大气辐射光谱。该系统设计可为后续气溶胶、云、水汽及其他大气成份等的遥感反演提供观测基础。本系统具有开发周期短、成本低的特点,可以提高探测效率。自主开发的硬件和控制软件不仅节约了高成本的软件维护费用,还具有良好的扩展性和可维护性。实验结果表明,多角度共CCD 光谱自动探测系统操作简便,探测精度高,对于提高大气综合探测水平有重要意义。