六相直线感应电机模糊间接矢量控制
2023-10-28张振宇汪光森王志伟
张振宇,汪光森,王 康,王志伟
(海军工程大学 舰船综合电力技术国防科技重点实验室,武汉 430033)
0 引言
直线电机是一种无需中间转换结构,直接将电能转化为直线运动机械能的电磁传动装置[1],因其结构简单、可靠性高、控制性能好,在轨道交通、矿井提升、电梯驱动、飞机弹射等多种场合有着广泛应用[2-3]。在电机应用于复杂场景时,如电机运行于水中,由于水体运动的复杂性,而且可能受到一些非线性的、时变的、无法预测的外部干扰,因此往往难以建立电机与水体系统的准确模型。工程上常用的比例-积分-微分(PID,proportional integral derivative)控制等,参数的整定需要准确的系统模型,在这类场景下,往往需要多次尝试进行参数的整定,较为复杂耗时,且控制精度不高,适应性也较差[4]。
模糊控制是一种建立在自然语言控制规则、模糊逻辑推理基础上的控制算法,它将被控对象看成一个“黑箱”,通过由操作经验、表述知识等转换成的“模糊规则”,实现对被控对象的控制[5],因此无需准确的数学模型,很适合复杂、非线性、时变的控制系统[6]。模糊控制经过多年的发展,目前已经在炼钢、化工、家用电器等多个领域应用。在电机控制方面,相关研究也有很多。如文献[7]利用模糊神经网络的非线性逼近能力构建了电机的逆系统,从而实现了对原系统更好的解耦。文献[8]利用模糊控制原理为电机最大再生制动力分配系数,从而提高了再生制动能量的利用率。模糊控制算法也可以与其他先进算法结合,更好的用于对电机的控制。文献[9]将模糊控制算法与滑模控制结合,通过模糊控制算法调节滑模增益,提高了滑模控制的抗扰能力,并削弱了抖振的问题。文献[10]采用模糊控制算法取代模型参考自适应算法的PI调节器,对电机转速估算,使得算法能够更好适应负载的波动。文献[11]采用模糊控制算法调节有限集预测代价函数中权重系数,有效地抑制了转矩和磁链脉动。
模糊控制也较多的应用于电机控制中的速度环。文献[12]在转速环中采用模糊自适应PI控制算法,改善了传统PID响应速度慢、超调大等问题。文献[13]以转速的偏差及其变化率作为模糊控制算法的输入,以参考电流值作为输出,提出了一种基于速度环模糊参数自适应的PID算法,该算法相比于传统的PID具有更好的鲁棒性。文献[14]将分数阶积分与分数阶微分引入模糊控制器中,设计了一种模糊分数阶PID转速外环控制器,提高了电机系统的控制性能。文献[15]提出了一种变论域自适应模糊PID复合控制策略,并将其应用到基于矢量控制的永磁同步伺服系统的速度环中,提高了系统的鲁棒性和抗扰能力。但模糊控制在用于速度环时,多是通过调节PID参数来改善系统的动态性能,由于PID参数较多,使得模糊规则较为复杂,调试也较为耗时。
为了实现电机在复杂环境条件下的准确控制,本文将模糊控制算法应用于六相直线电机间接矢量控制的速度环,以位移和速度的偏差为输入,经过模糊推理直接得到反馈电磁力,避免了复杂系统的建模和对PID参数的整定,且相比于模糊调节PID参数的方法,只有一个模糊输出量,控制规则更少。另外通过对隶属函数、模糊控制规则的优化选取,并采用隶属函数分区和中心法,减小了计算量,从而实现了算法的实时计算。最后通过仿真和半实物仿真平台对所提算法进行了验证,结果表明所提算法能够实现位移和速度对参考值的良好跟踪,且通用性好,能够实现复杂环境下直线电机的准确控制。
本文后续章节安排为,第一节介绍了六相直线感应电机的建模过程,以及间接矢量的控制方法。第二节阐述了模糊控制算法及其与电机控制算法的结合,第三节展示了仿真及半实物仿真平台的验证效果,最后第四节对全文进行了总结。
1 六相直线感应电机间接矢量控制
1.1 六相直线感应电机模型
本文被控对象为六相直线感应电机,六相绕组为半对称结构,两套绕组互差30°电角度。绕组联结方式如图1所示[16]。
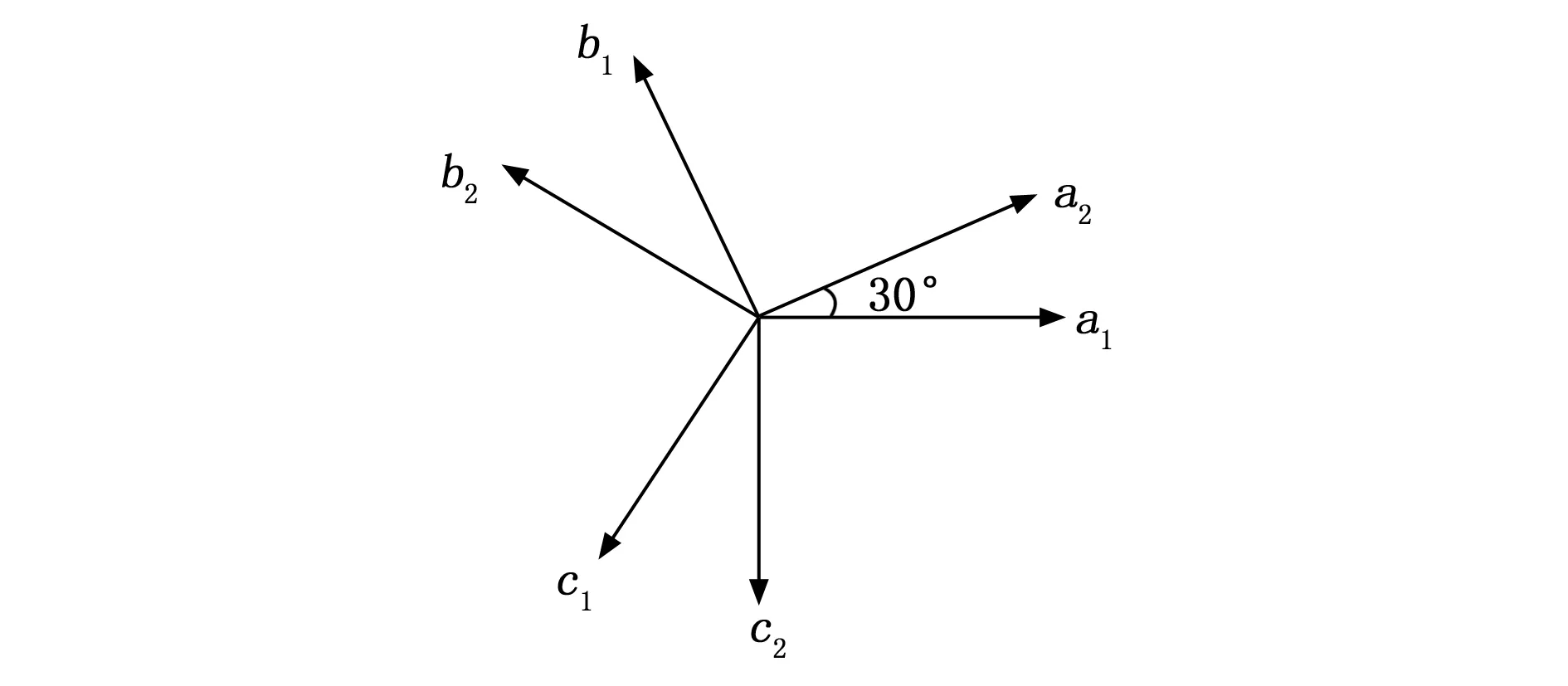
图1 直线电机初级绕组分布
在电机模型建立前,作如下的假设:1)忽略空间谐波的影响;2)忽略铁芯磁滞和铁心损耗;3)忽略频率和温度变化对绕组电阻的影响;4)由于初级绕组极数较多且动子运动速度较低,忽略边端效应。在自然坐标系下,六相直线电机的磁链和电压方程可以表示为[17]:
ψs=Lssis+Lsrir
ψr=Lrsis+Lrrir
(1)
us=Rsis+pψs
ur=Rrir+pψr
(2)
式中,ψs、ψr为定子和转子磁链,Lss、Lrr为定子和转子的自感矩阵,Lsr、Lrs为定转子的互感矩阵,us、ur为定子和转子电压向量,is、ir为定子和转子电流向量,Rs、Rr为定子和转子电阻矩阵,p为微分算子。
由于六相电机的数学模型是一个高阶、非线性、强耦合的多变量系统,考虑通过坐标变换,将两个三相分别变换到同步旋转坐标系中,实现解耦控制。在同步旋转坐标系下,磁链方程为[18]:
ψsd1=Lsisd1+Lmisd2+Lmird1+Lmird2
ψsq1=Lsisq1+Lmisq2+Lmirq1+Lmirq2
ψsd2=Lmisd1+Lsisd2+Lmird1+Lmird2
ψsq2=Lmisq1+Lsisq2+Lmirq1+Lmirq2
ψrd1=Lmisd1+Lmisd2+Lrird1+Lmird2
ψrq1=Lmisq1+Lmisq2+Lrirq1+Lmirq2
ψrd2=Lmisd1+Lmisd2+Lmird1+Lrird2
ψrq1=Lmisq1+Lmisq2+Lmirq1+Lrirq2
(3)
式中,Lm为激磁电感,Ls为同步坐标系下初级绕组漏感,Lr为同步坐标系下次级绕组漏感。下标d表示d轴分量,下标q表示q轴分量,下标1和2用于区分两套三相绕组。
电压方程为:
usd1=pψsd1-ωeψsq1+Rsisd1
usq1=pψsq1+ωeψsd1+Rsisq1
usd2=pψsd2-ωeψsq2+Rsisd2
usq2=pψsq2+ωeψsd2+Rsisq2
urd1=pψrd1-(ωe-ωr)ψrq1+Rrird1
urq1=pψrq1+(ωe-ωr)ψrd1+Rrirq1
urd2=pψrd2-(ωe-ωr)ψrq2+Rrird2
urq2=pψrq2+(ωe-ωr)ψrd2+Rrirq2
(4)
式中,ωe为同步旋转角速度,ωr为转子旋转角速度。
电磁力方程为:
Fe=βLm[(isq1+isq2)(ird1+ird2)-(isd1+isd2)(irq1+irq2)]
(5)
式中,Fe表示电磁力,β=π/τ为波长系数,τ为电机极距。
1.2 间接矢量控制算法
电机采用间接矢量控制,主要原因是本文所研究的直线电机,工作时间较短,对响应速度要求较高,间接矢量控制采用开环磁通控制,属于前馈控制的思想,具有响应速度快的优点[19-20]。当采用转子磁场定向,即令d轴与转子磁链的方向重合,磁链的q轴分量为0,即:
ψrd=ψr
ψrq=pψrq=0
(6)
转子绕组电压为0,根据式(4)与式(6),得到:
(7)
式中,ωs为滑差频率,ωs=ωe-ωr。
根据式(3)、式(6)和式(7),可以求出转子磁链和滑差频率如下:
(8)
(9)
根据式(3)和式(5),得到电磁力的表达式:
(10)
对电机的两个三相采用相同的控制策略,其中一个三相的间接矢量控制算法原理如图2所示。图中上标*代表给定值。x、v、a为位移、速度和加速度。ACMR为电流励磁分量调节器,ACTR为电流转矩分量调节器。Fp为前馈力,由给定的速度和加速度决定,Ff为反馈力,由速度环计算得到。
2 模糊控制算法
由图2可知,给定的命令电磁力包括前馈力和反馈力两个部分,对于反馈力的计算,传统上一般采用PID控制的方法,但是PID参数的整定依赖于准确的系统模型,且较为复杂。因此考虑在原有间接矢量控制的基础上,将模糊控制用于速度环,避免了复杂的系统建模和参数整定过程。模糊控制算法的原理如图3所示[21]。
算法的原理为:以位移和速度误差作为输入,经量化因子放大,再通过隶属函数模糊化,按照预先设定的模糊控制规则进行模糊推理,将推理的结果采用中心法进行清晰化,并通过比例因子放大,得到反馈电磁力作为输出。由于仅有两个输入和一个输出,因此整个模糊控制算法计算量较小。
输入和输出论域选定范围为[-5,5],这样可以使隶属函数的解析表达式更加简洁。量化因子的选择则要根据运行工况下的最大偏差来确定,本文选定速度偏差范围为[-0.5,0.5],位移偏差范围为[-0.05,0.05],因此速度误差对应的量化因子设定为10,位移误差对应的量化因子设定为100。由于实际工况存在一定的干扰,实际误差可能会超出该误差范围,对于这种情况,则按照最大误差处理。例如对于位移误差为0.06 m/s的情况,则按照位移误差为0.05 m/s处理。对于比例因子的确定,则要根据实际的工况进行调节。在实验前,可以根据经验对比例因子设定一个大致范围,实验时,再根据调节效果适当增大或减小比例因子,相比于PID需要整定3个参数,该方法更为简单。
2.1 隶属函数与模糊控制规则
隶属函数一般采用三角形或者高斯型,考虑到计算量,采用三角形隶属函数,且仅使用5个模糊子集{NBNSZOPSPB},分别代表负大、负小、零、正小、正大。采用的三角形不完全相同,因为在输入量较大时,调节较为粗糙,在输入量较小时,调节更为精细。输入隶属函数的形式如图4所示。
输出隶属函数形式如图5所示。
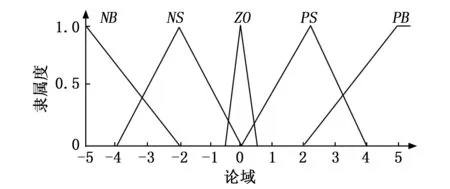
图5 输出隶属函数示意图
隶属函数形式较为简单,其表达式都是线性函数,因此计算量很小。且由于隶属函数都是关于0轴对称的,因此实际仅需存储横轴正半部分的函数,对于负半轴的计算,直接取绝对值,即可求出相应的隶属度,因此函数存储可以减少一半。
为了实现较好的控制效果,需要制定合适的模糊控制规则。本文所制定的模糊控制规则如表1所示。
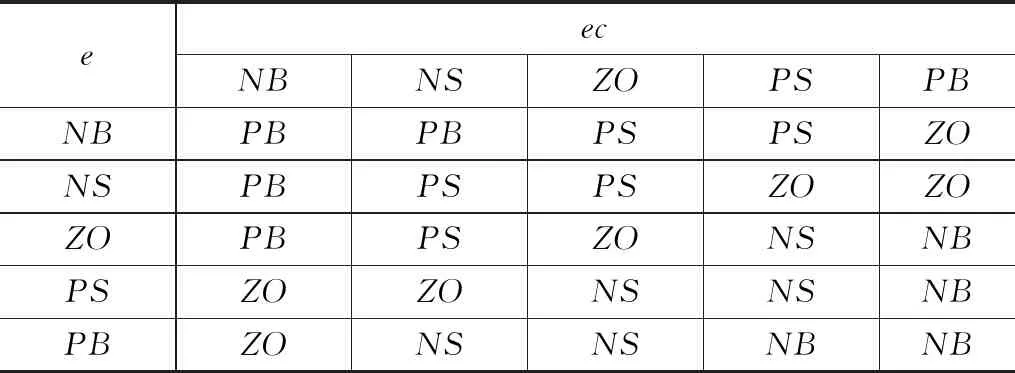
表1 模糊控制的规则
表中:e表示位移误差,ec表示速度误差。
模糊控制规则遵循:当速度和位移误差同为负时,说明实际速度和位移小于参考值,给定的电磁力偏小,此时应当增大电磁力,且误差越大,补偿力的绝对值应当越大;当速度和位移误差同为正时,说明实际速度和位移大于参考值,给定电磁力偏大,此时应当减小电磁力,且误差越大,补偿力的绝对值应当越大;当速度和位移误差不同正负号时,此时应当根据二者误差大小确定补偿力的正负以及合适的值。总体而言模糊规则数目较少,实现较为简单。
2.2 近似推理与清晰化
由表1可知,一共有25条模糊控制规则,如果每次计算都调用25条规则进行推理,计算量很大,因此考虑采用分区的方法[22],筛选出有效的控制规则,从而减小计算量。输入隶属函数分区如图6所示。
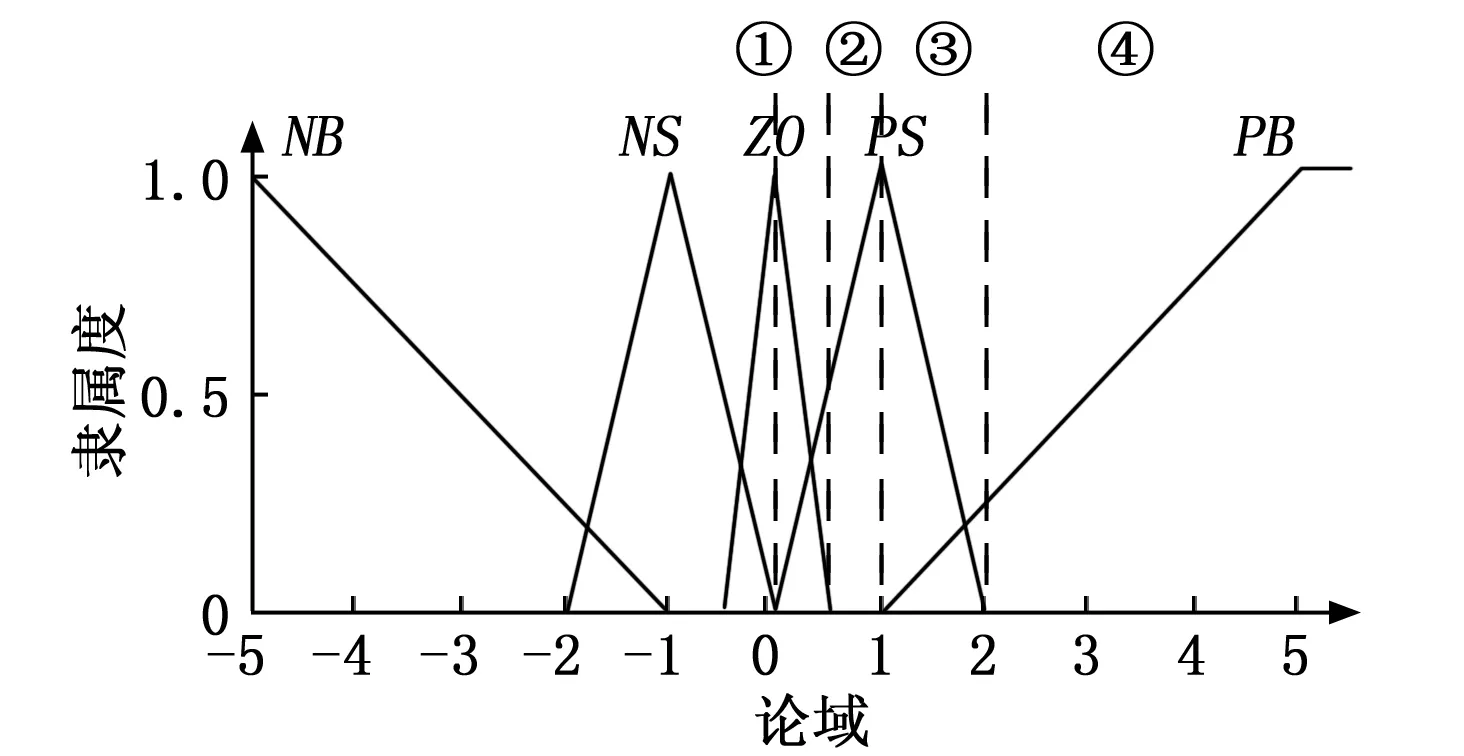
图6 隶属函数分区示意图
鉴于隶属函数关于0轴对称的,因此只对正半轴进行分区,分区的依据是该区域内包含隶属函数的数目,例如,在①区有ZO和PS两个子集,而②区只有PS一个子集。通过分区,可以确认有效的模糊子集,其余不含有效模糊子集的控制规则不用考虑,从而减小模糊推理计算量。
选择有效控制规则,采用Mamdani算法进行推理[23],得到的结果需要经过清晰化,转换为具体的数值。清晰化一般采用重心法,但是重心法的计算量较大,考虑采用文献[24]中的中心平均法,其计算结果与重心法较为接近,且计算量较小。中心平均法具体计算方法为:
(11)

根据隶属函数和模糊控制规则,我们可以得到模糊推理输出曲面,如图7所示。

图7 模糊推理输出曲面
图7中,e和ec分别表示位移和速度误差,ΔF为模糊推理的输出。从图中可知,模糊推理输出曲面较为平滑,且具有对称性,与设定规则相符,即e和ec同为负时,实际速度和位移小于参考值,给定的电磁力偏小,因此输出的ΔF为正,增大电磁力;e和ec同为正,则同理ΔF为负,减小电磁力。且e和ec的绝对值越大,ΔF的绝对值也越大。当e和ec不同号时,则根据误差绝对值的大小来确定具体确定ΔF的正负和大小。另外,当e和ec同为0时,ΔF也为0,符合设定的规则。
3 仿真和硬件在环测试
3.1 仿真结果
为验证算法的正确性,在Simulink中搭建了系统的仿真模型,仿真模型主要由电源、逆变器、电机、负载、水动力和控制模块几个部分组成,电源为整个系统提供能量,逆变器将输入的直流电逆变为交流电,供给电机,电机动子推动负载加速运动,水动力模块主要模拟水体环境,控制模块主要是包含图2所示的控制算法的实现。整个系统可以模拟直线电机在水体环境下,短时间内推动负载加速运行的工况。电机参数和控制参数如表2所示。
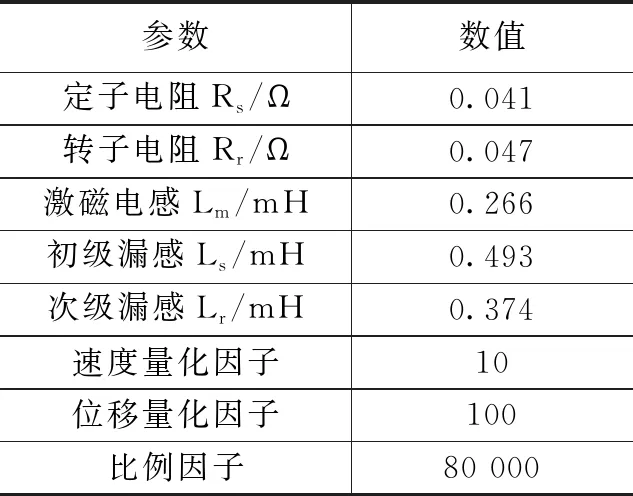
表2 电机参数和控制参数表
为了充分说明算法的有效性,首先给出模糊控制算法投入前,即不加反馈力,命令力直接等于前馈力的情况,之后再投入模糊控制算法,对比模糊控制算法投入前后的速度位移和命令力数据,如图8所示。
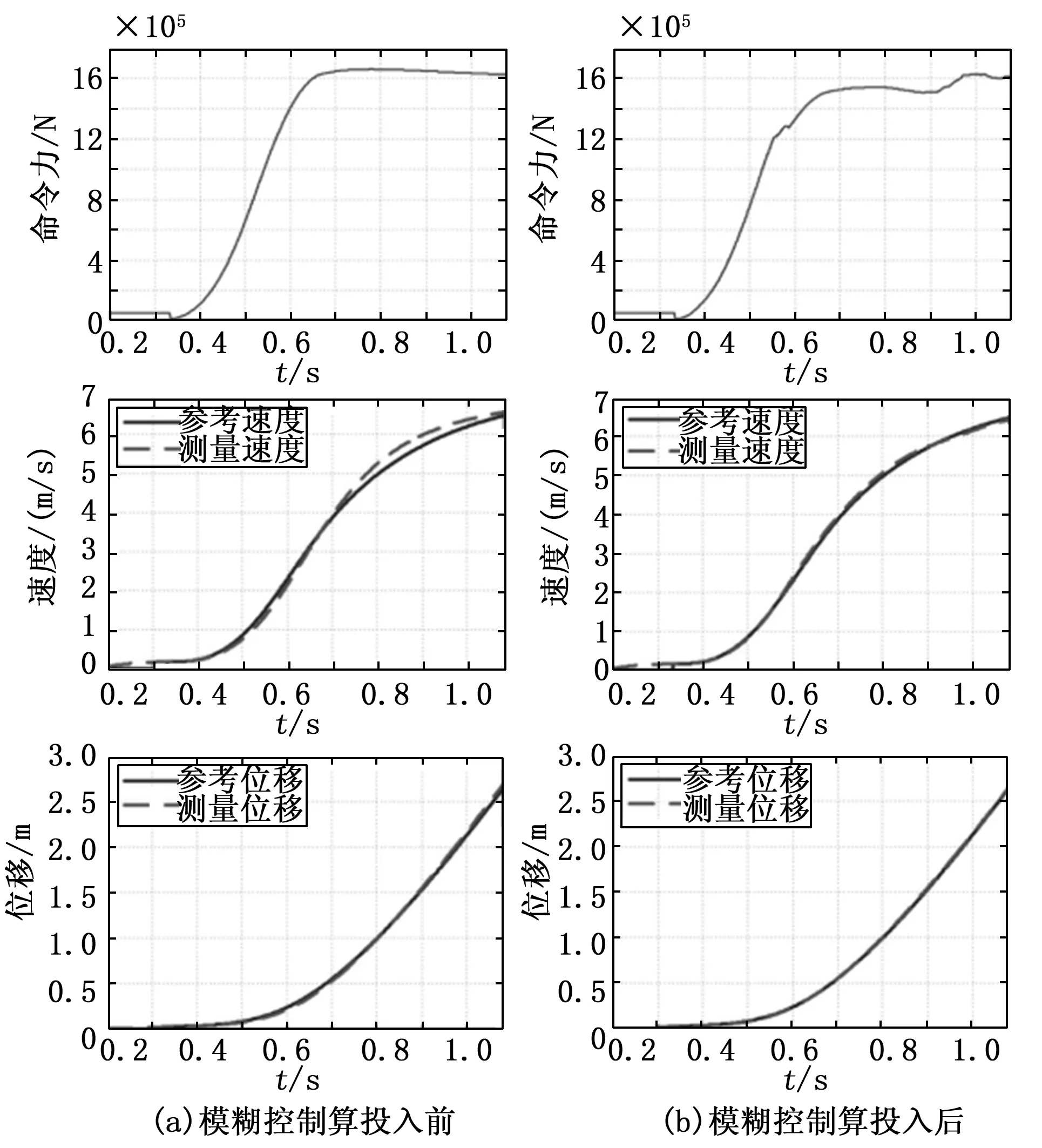
图8 模糊算法投入前后仿真结果对比
从仿真结果可以看出,模糊控制投入前,速度位移跟踪效果较差,电机运行后期,速度明显偏高,速度和位移都有较大的偏差,最大速度误差达到0.296 m/s,位移误差为0.054 m,模糊控制投入后,速度和位移误差大大减小,最大速度误差仅为0.098 m/s,减小了66.7%,最大位移误差仅为0.015 m,减小了72.2%。模糊控制投入后,0.5 s之前,速度位移误差较小,电磁力的调节也较小;在0.5 s之后,误差明显变大,电磁力调节力度也增大,速度和位移误差显著减小。从结果上看,速度和位移已经能够准确的跟踪参考值,且电磁力的调节较为平滑,说明模糊控制算法的有效性。
3.2 硬件在环测试结果
为进一步验证算法的可行性,搭建了半实物仿真平台,如图9所示。
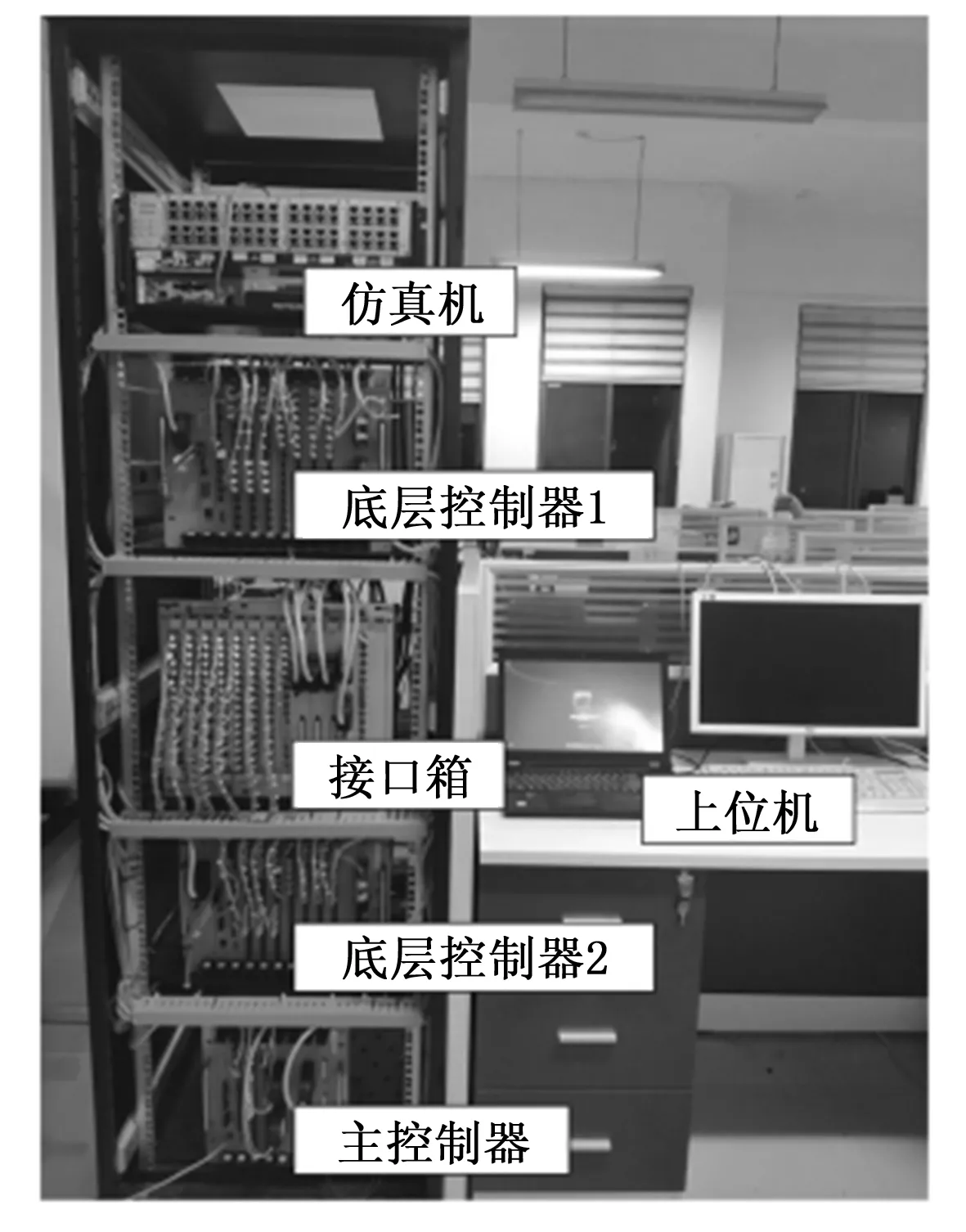
图9 半实物仿真平台
图9中,上位机即带有Labview软件的笔记本电脑,用户可以通过在界面中输入指令和参数,通过串口下发给主控制器,执行不同的运行工况。另外,上位机可以存储主控制器上传的故障和状态数据。主控制器主要包括数字信号处理器(DSP,digital signal processor)芯片以及若干光电转换板,用于将指令和参数通过串口通信同时发送给两个底层控制器,并接收底层控制器上传的故障和状态信息。两个底层控制器和主控制器具有相同的硬件组成,每个底层控制器负责执行一个三相的控制算法,包括图2所示的控制算法、模糊控制算法和相关的故障判定等。算法主要在DSP芯片中执行,由于本文设计的模糊算法计算量小,执行时间较短,不会影响实时控制效果。两个底层控制器通过接口箱与仿真机连接,接口箱包含若干光电转换板,主要用于信号的转换和适配。底层控制器发送IGBT驱动信号到仿真机,同时也采集仿真机中电机模型的位置、电压、电流等状态信号。仿真机包含电机、逆变器和水动力、负载等模型,用来模拟实际的系统运行状态[25]。控制参数仍采用表2中参数,在半实物仿真平台上的测试结果如图10所示。
由图10可知,半实物仿真平台的测试结果与仿真结果基本吻合,模糊控制算法投入前,速度和位移都有较大的偏差,最大速度误差为0.187 m/s,位移误差为0.096 m,模糊控制投入后,速度和位移误差大大减小,最大速度误差仅为0.064 m/s,减小了65.8%,位移误差仅为0.004 m,减小了99.6%,速度和位移能够较好跟踪参考值,且电磁力调节较为平滑,验证了模糊间接矢量控制算法的有效性。
为进一步验证算法的通用性,更改参考速度和位移,并将负载调整为原来的1/2,新工况的硬件在环测试得到结果如图11所示。
由图11可知,工况改变后,前馈力明显偏大,使得速度和位移的误差很大,相比于图10,最大速度误差由0.187 m/s增大到0.281 m/s,位移误差由0.096 m增大到0.183 m,但模糊控制投入后,速度和位移误差显著减小,最大速度误差仅为0.051 m/s,减小了81.6%,相比于图10,最大误差更小,误差减小的比例也更多,而位移误差为0.017 m,减小了90.7%,相比于图10,最大误差稍大,误差减小比例略小,但速度和位移能够准确跟踪参考曲线,电磁力调节稍有波动,但基本平滑,验证了算法的调节能力以及算法的通用性。
4 结束语
本文将模糊控制算法与间接矢量控制结合,用于复杂环境条件下六相直线感应电机的控制,通过将模糊控制算法应用于速度环,避免了对复杂系统建模及PID参数的整定,由于模糊控制仅包含两个输入和一个输出,因此模糊规则较为简单,且调试时仅调节比例因子,能够大幅节省参数整定时间。在模糊控制器设计时,通过对模糊控制规则的优化选取、对隶属函数分区和采用中心法进行清晰化,减小了算法的计算量,确保了实时控制。最后,通过仿真和半实物仿真平台对所提算法验证,结果表明在模糊算法投入后,位移和速度误差减小都超过了65%,速度和位移能够准确的跟踪参考值,且能够适用不同的负载工况,验证了算法的准确性和通用性。后期考虑将该算法应用到实际的装置中。
