无人机航测在道路工程测量中的应用研究
2023-10-27李东
李东
(广西路桥工程集团有限公司)
1 引言
当前,我国的无人机航测技术取得了非常显著的成绩,尤其是在道路工程测量中,发挥着积极作用,无人机航测技术正成为道路工程测量中最重要且最先进的一种技术手段,对整个道路工程的准确测量和稳定运行有很重要的作用。
2 采集道路工程三维遥感图像
使用无人机对道路工程进行采集,根据地形检测出的数据信息对其进行三维重建,提出有效的建模方案,从而提高对道路工程整体图像采集的准确性。为了构建三维辅助测量模型,需要选择出适合此道路的网格间距,并且使用此匹配方法建造道路工程图像的采集模型。构建道路工程图像的采集模型,最主要的就是构建出几何要素点的集合,假设C为几何测量出的长度,通过特征点的采集,可以得出中心位置S中各个像素分布的位置参数,而此坐标采用的是世界大地测量系统中的地心坐标系(简称为WGS84),这样就可以得到回传数据的特征,并且满足遥感图像前n个像素的特征分布[1]。采用道格拉斯-普克算法测量出的简化曲线,构建出地形辅助测量模型,得到整个网格区域的中心为S。然后在前期基础上,连接AO两个点,保证被探测目标处于正确位置,从而获得工程需要的全局空间位置分布图,通过构建类地心弧线,真正形成观测目标点的仿真模型,用以下公式来表示。
式(1)中:我们可以得知数据密度的特征量,其中B1,B2,B3分别表示不同的阈值。还可以通过常用的几何路径测试法进行验证,我们还可以获得一个全新的公式用来表示采集数据后的特征分布。
式(2)中:p0(x)是一个特殊的数据节点,表示该工程三维模型中某一采集数据的处理结果。按照一定的数值处理和重组加工,我们可以得到新的道路工程3D测量模型,如公式3所展示。
式(3)中:通过对几何识别函数∇x的分析,我们可以得到3D地形分布中的相关数据,从而帮助工程建造者利用三维辅助测量模型,获得精确的施工3D影像图。通过对其特性的分析,可以得到3D地形分布中被人为破坏的特征参数,提前做好分析及应对准备。
3 提取遥感图像线特征
在道路工程测量中使用无人机航测技术所拍摄到的图像中,存在着大量的线特征,而图像中的线特征在进行图像识别过程中,始终处于最基础且最有用的一种特征,。本文中所提到的道路工程测量技术,就需要以提取图像线特征为基础,构建所需要的视觉框架结构,而正确的提取方法对整个视觉框架结构最终的呈现结果有着非常重要的价值与意义。拉东变换(又称为Radon变换)主要就是将m维的空间域在m-1维的平面上利用积分表示出来。假设两维坐标面上的函数g(x,y),优先确定直线F,以获得它的拉东变换,用σ0=xcosϑ0+ysinϑ0来定义。我们先观察这条直线的σ0和ϑ0两个参数,σ0表示直线所处位置到初始位置的距离,而ϑ0一个表示垂直距离到X轴的夹角。我们沿着直线F求值,对函数g(x,y)进行积分,得到新函数g(x,y)。求得拉东变换之后的函数值G(ϑ0,σ0),通过下面的公式4进行延时。
式(4)中:ε表示单脉冲函数;而dx、dy表示x、y上的差值。然后,再利用函数二维平面上的全部直线F(ϑ,σ)进行积分G(ϑ,σ)的计算,得到经过拉东变换后的函数g(x,y)。根据拉东变换的相关原理可知,拉东变换是提取图像线特征中最重要的步骤。而在进行处理过程中,首先需要做的就是将彩色的RGB图像利用下述公式(5)转变成为灰度的图像。
式(5)中:根据三原色原理:R、G、B代表红、绿、蓝,而他们的数字则反映亮度值;Gray是灰度值。
图像特征提取核心在于对图像边缘点的有效提取,而采取拉东变换则是最直接的方法。灰度图像的变化值在物体内部比较平稳,但是背景灰度与边缘像素灰度的阈值有很大不同,给人以突变的视觉冲击。如何高效提取边缘像素,则决定着成像的好坏,以灰度值突然变好为前提,进行梯度捕捉,通过设定阈值与采集数值的对比,从而有效提取边缘的像素点。得出的二值影像就是边缘像素影像,1是边界点的恒定数值,0则是非边界点的数值,一条白色的曲线就呈现出来。通过拉东变进行线性积分的求取,我们得到关于(ϑ,σ)平面上的图像显示,在合理的阈值设定后,我们可以得到图像的线性特征。
4 图像滤波处理并生成道路工程数据信息
滤波的概念就是将整个信号中某一特定的波段频率进行过滤处理,这是一种防止信号被干扰的重要措施。然后就需要对三维遥感图像,使用相匹配的滤波机器进行滤波处理,将提取到线特征后的图像中所存在的特征变化,利用目标数据的剖面结果,获取图像中特征的交集处。再根据特征点的分布情况,就可以得到道路回传后的三维遥感图像,其重构的输出曲线为下式(6)所示。
式(6)中:k为道路回传后的三维遥感图像的回传系数,β为图像中特征的集合,a0为连接成曲线的坐标点集合。沿着弧形进行数据采集,得到的辅助测量的特征为下式(7)。
式(7)中:G0,Gn为道路的高程数据分布,构建出三维辅助测量目标点集合,根据遥感图像会得到交点检测的结果,并且得到的结果和目标点的几何路径都会满足下式(8)。
式(8)中:Zyo为高程数据的采集率,x,y为新增控制点与道路进行融合的参数,再根据几何路径会得到整体的函数,再根据贝塞尔曲线来实现对三维道路工程的数据重组,会得到图像滤波处理的模型为下式(9)。
式(9)中:trace(x,y,λ)则等于其中h2为三维特征的参考数值,l2为数据信息的分布,φ为三维道路检测出的网格特征分布集合。通过上述就可以实现三维遥感图像对滤波进行的检测和处理[2-3]。
要想准确地获得道路工程的信息,首先,需要利用无人机航测技术来对道路工程的原始数据进行采集,并选择出目标点进行标记以及后续的检测;其次,可以通过得到的标记点对所属空间进行加密处理,随之进行全数据处理,从而得到更加准确的位置和其他外在因素;最后,可以利用“三维技术”将监测出的数据进行三维建模,并且进行反复检测,从而得到最终的整体工程图像。将检测到的数据,通过三维遥感图像进行滤波处理,结合无人机航测得到的图像,最终实现无人机航测在道路工程测量中的应用[4]。
5 应用测试与分析
为了检验此次提出的无人机航测技术在道路工程测量中的可靠程度以及实际使用的效果,需要构建模拟实验测试平台,以某道路工程施工区域作为监测对象,代替实际道路工程测量,降低测试的风险以及外在因素带来的不稳定性。在实验平台搭建三个完全一致的模型,其中一个使用本文提到的无人机航测技术,另外两个使用传统测量技术(Excel VBA与GPS-RTK技术),从而比较哪种技术在实际地形测量中更加准确且便捷。具体测量结果如图1所示。
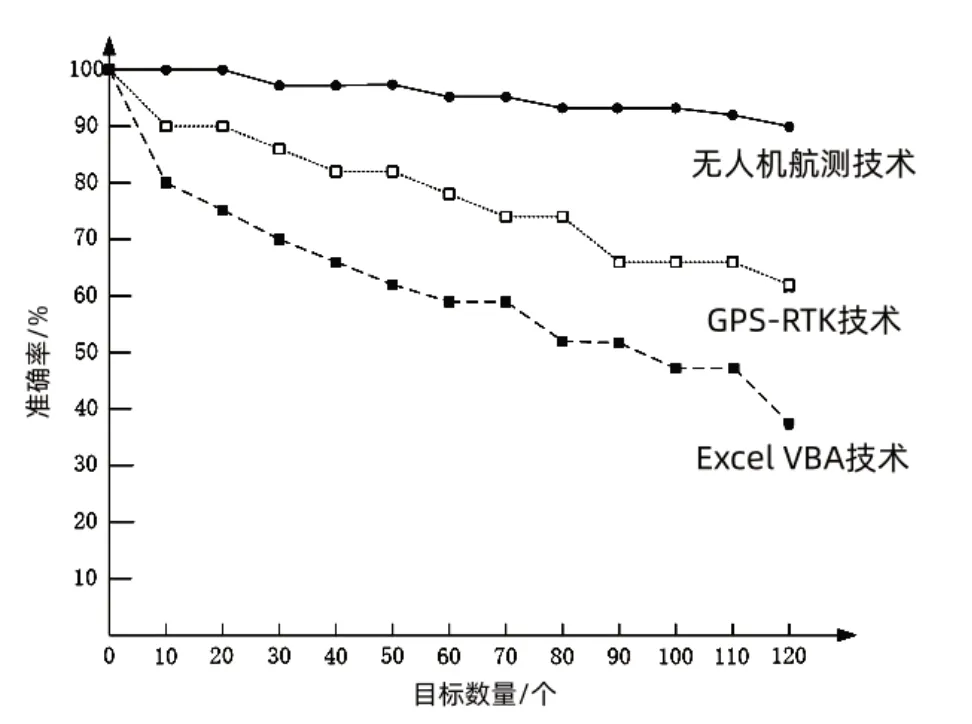
图1 不同方法测量目标准确度示意图
由图1可以看出:当目标数量增加到120个时,使用Excel VBA技术对道路工程进行测量,测量结果的准确率在38%~80%之间;使用GPS-RTK技术对道路工程进行测量,测量结果的准确率在62%~90%之间;而使用无人机航测技术对道路工程进行测量时,测量结果的准确率在90%~100%之间[5]。通过计算可以得出,使用Excel VBA技术进行道路工程测量时,平均准确率58.92%;使用GPS-RTK技术进行道路工程测量时,平均准确率为76.33%;而使用无人机航测技术进行道路工程测量时,平均准确率为95.17%。
综上所述,在对道路工程进行测量时,无人机航测技术对其测量的准确度始终在90%以上,改变了传统道路工程测量技术准确度不高的情况[6]。
6 结语
此次研究在明确传统道路工程测量技术存在的问题后,有针对性地解决了测量数据不够准确的情况,为后续更复杂地形的测量提供解决问题的基础。
从文中提出的无人机航测技术可以看出,此方法只可针对道路工程这种相对较为平整的地形进行测量,还无法实现自动同步。今后,可以通过技术手段进行提高,并且将同步技术运用到道路工程测量中,为我国合理地开发道路资源提供基础保障,从而推动道路工程的发展。
