小行星撞击防御任务分析与设计
2023-10-25韩承志
张 熇,顾 征,韩承志
(北京空间飞行器总体设计部,北京 100094)
引 言
近地小行星的轨道分布、物理化学特性反映了太阳系早期物质状态、行星形成过程的极早期阶段,同时还以撞击方式参与地球地质形貌及宜居条件的塑造,因此是天文学及行星科学的重点、热点、前沿研究对象,也是深空探测广受关注的目标,同时一些高危的近地小行星也对地球人类的文明造成潜在安全威胁。目前已完成轨道编目的近地小行星超过3万颗,约占10 m(等效直径,下同)以上近地小行星总量的1%。据国际分析评估,在已完成轨道编目的近地小行星中,100年内威胁最大的是约370 m的阿波菲斯(Apophis)小行星,预计2068年前后接近地球;2035年前威胁最大的是约29 m的近地小行星2008JL3,预计2027年前后接近地球。实际上尚未进入轨道编目的近地小行星数量更为庞大,其潜在撞击风险远大于当前评估。
近地小行星撞击风险是人类需面对的共同威胁,本文在对小行星防御研究现状进行调研的基础上,针对小行星撞击防御进行了详细的任务分析,提出了“伴飞观测+撞击+伴飞评估”的小行星撞击防御任务方案,与已实施的地外天体撞击任务方案(如美国的深度撞击、双小行星重定向测试任务)相比,该方案可以通过一次任务同时实现动能撞击和天基评估,具有较好的创新性和工程实施性。
1 研究现状
目前国际上主要以开展在轨处置技术演示验证为主,重点发展2类技术:以动能撞击为主的瞬时作用手段,已经开展了在轨演示验证任务;引力牵引、激光烧蚀驱动、附着推离、太阳光压、质量驱动、离子束推离等长期作用手段[1-3],提出了相应的防御任务概念,形成了相对完善的技术研究体系,在轨处置技术手段汇总见表1。

表1 不同类型防御手段比较分析[4-8]Table 1 Comparative analysis of different types of defense measures[4-8]
在众多在轨技术手段中,动能撞击技术成熟度高,是在轨处置首选技术手段。
美国国家航空航天局(National Aeronautics Space and Administration,NASA)在Neugebauer等提出的登陆彗星和伴飞小行星(Comet Rendezvous Asteroid Flyby mission,CRAF)概念设想基础上,提出了采用超高音速撞击方式开展科学探测,以探究彗星内部结构及成分帮助人们了解太阳系早期状态[9-11],并于2005年实施了“深度撞击”(Deep Impact)任务,以科学探测为目的,重点验证了深空(距离地球约1.3亿km)高速动能导航制导与控制等技术。2005年7月5日,370 kg小型撞击器以10.2 km/s的速度击中直径6 km“坦普尔1号”(9P/Tempel 1)彗星的彗核[12-14]期间飞越器对撞击效果进行了掠飞观测。撞击后的一段时间,撞击坑被尘埃遮蔽,NASA科学家看不到撞击后形成的撞击坑,如图1所示。2011年“星尘号”(Dusty)探测器再次飞越“坦普尔1号”彗星[15],并没有按预期发现对应的大撞击坑,推测可能是撞击坑随时间发生溃散,如图2所示。
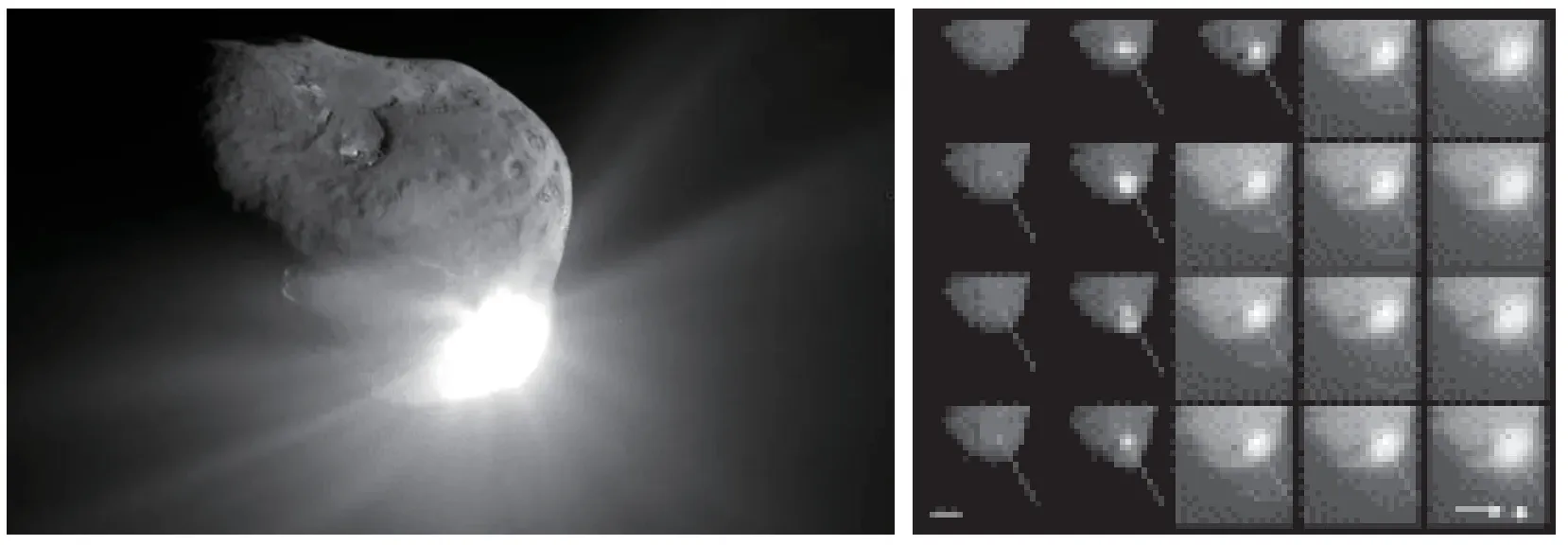
图1 “深度撞击”飞越器高分辨率相机拍摄撞击过程影像[16]Fig.1 High-resolution images of the impact process of “Deep impact” flyby[16]
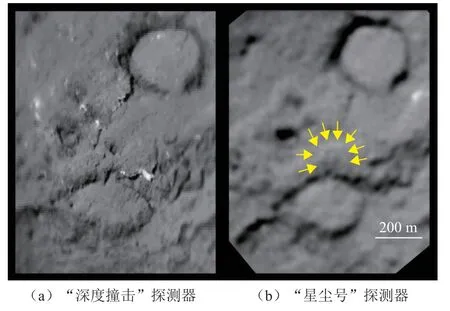
图2 探测器撞击坑[17]Fig.2 Impact crater of the explorer[17]
“双小行星重定向测试”(Double Asteroid Redirection Test,DART)是国际上首次以行星防御为目标的试验任务,通过动能撞击改变小行星运行轨道,并评估动能撞击的防御效果,初步建立撞击防御能力,任务概念如图3所示。
D A R T 任务选择的最终目标为“迪蒂莫斯”(Didymos)双小行星系统,迪蒂莫斯-A(Didymos A)直径约780 m,迪蒂莫斯-B(Dimorphos)直径约160 m,迪蒂莫斯-B环绕迪蒂莫斯-A运行。
北京时间2022年9月27日7点14分,DART任务探测器准确撞击了迪蒂莫斯-B小行星,其释放的立方星掠飞拍摄撞击过程影像见图4,由于距离较远且飞行速度快,成像的数量、图像分辨率、清晰度等均有限,难以据此开展撞击前后小行星地形地貌的变化分析。“詹姆斯·韦伯”(James)、“哈勃”(Hubble)等太空望远镜、“露西”(Lucy)小行星探测器和全球多台地面望远镜对撞击过程的监测显示,撞击产生了大量溅射物,双星系统的亮度瞬间增加到2.29 ± 0.14星[18]等,表明撞击试验取得成功见图5。根据观测数据分析,撞击后迪蒂莫斯-B围绕迪蒂莫斯-A轨道周期改变了–33 ± 1(3σ) min[19-20],动量增益因子β在2.2~4.9之间[21]。

图4 立方星飞掠过程中拍摄的撞击图像[11,22]Fig.4 Impact images captured in the flying process of cubic star[11,22]
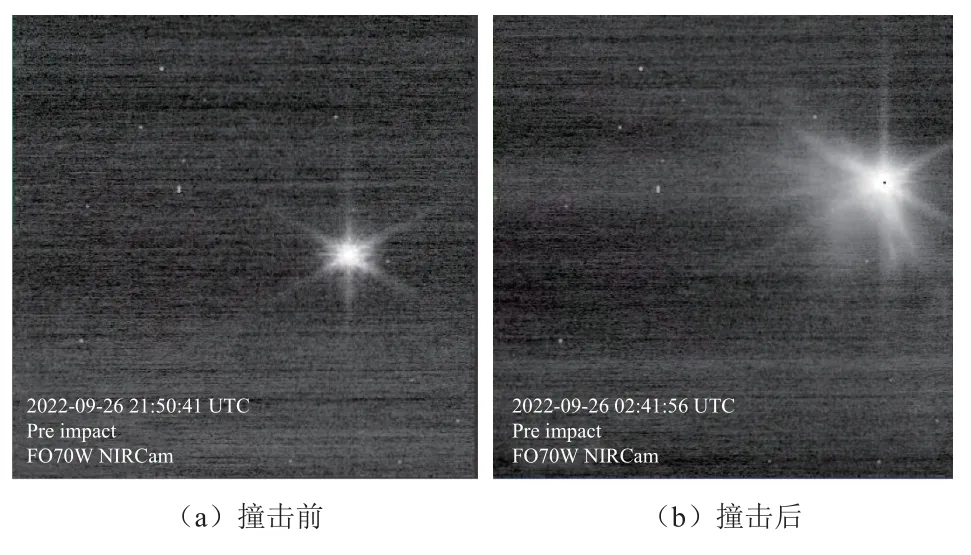
图5 地面观测图像Fig.5 Ground observation images[18-19]
在开展在轨动能撞击演示验证的同时,欧美等国也提出了若干基于动能撞击的概念任务:欧洲依托“地平线2020”(Horizon 2020)项目,提出了近地天体护盾任务概念,该任务计划对小行星实施撞击,通过测量小行星受撞击前后轨道的变化来评估撞击效能[23];美国爱荷华州立大学小行星偏转研究中心提出了编队动能撞击和核爆+动能撞击的拦截器设计概念任务[24];美国劳伦斯利弗莫尔国家实验室提出了多级动能撞击概念任务,但是以上任务都仅停留在概念设想,未见后续工程化进展。
1)采用动能撞击成熟度较高,且能够快速响应,是应对短期预警目标实施干预的有效途径;
2)国际上仅美国实现撞击技术的在轨验证,均采用“撞击+掠飞观测”的任务形式,其有效观测时间短、条件受限,难以获得全面、高精度的在轨探测数据;
3)国际上尚未实现在撞击前后对目标天体的精确探测,也未实现撞击时对撞击过程的近距离凝视观测,因此无法对撞击前后地形地貌变化、撞击时溅射幕的形状、溅射物的大小、分布、速度等进行精确分析,撞击效果的系统性、精确性评估是国际公认的技术难题。
因此,国际上对于小行星防御技术研究虽取得一定进展,但整体上还缺乏深入研究和分析。动能撞击虽然是当前主要的手段,但对于小行星轨道的改变是非常微小的,还不足以应对未来所有可能的小行星撞击风险。所以,当前阶段任务的主要目标是验证相关关键技术,比如高精度撞击的制导导航控制、面对复杂结构小行星的撞击动量传递机理、撞击效果的评价方法和精度等,为未来开展实质性的防御奠定基础。因此,系统开展撞击处置技术验证、精确撞击效能评估是应对小行星潜在威胁的迫切需求。
2 任务分析
2.1 撞击任务分析
撞击体撞击小行星目标将产生复杂的侵彻、开坑和反溅,伴随着局部相变(熔化和气化),同时也存在着动量交换过程,而这种动量传递过程正是小行星防御的基础。近些年来随着小行星防御工程的展开,技术人员发现探测器撞击小行星的过程中,能量传递并非像以前理解的“动量守恒”那么简单,而是在动量传递时存在一个重要的物理现象——动量增益效应(Momentum Multiplication),即撞击体传递给目标的动量大于撞击体原始动量,可显著改变目标轨道,这对小行星防御任务设计极其重要,如图6所示。近些年来,国外多个机构开展了小行星撞击偏转评估(Asteroid Impact and Deflection Assessment,AIDA),主要工作集中在对动量增益效应的研究[25-29]。
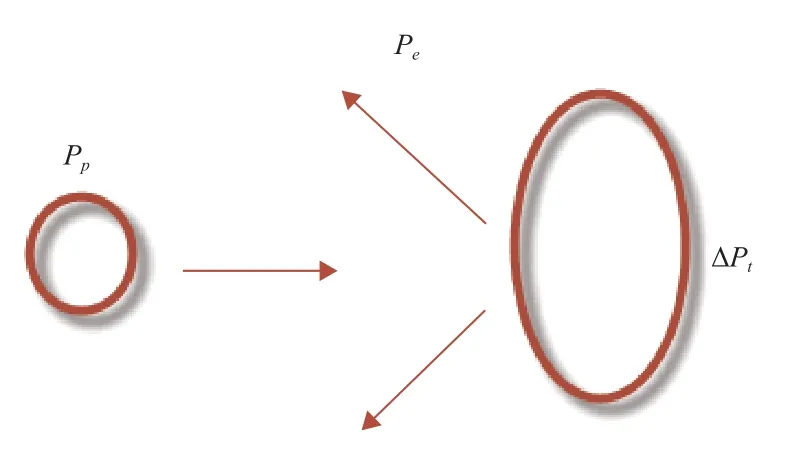
图6 动量增益效应示意图Fig.6 Momentum gain effect
反溅效应是影响撞击体撞击小行星产生动量增益的原因,即动量增益效应取决于反溅物的质量和速度,其计算公式为
其中:β为动量增益因子;Pp为撞击器动量;Pe为反溅动量;ΔPt为小行星动量增量。对于理想塑性碰撞,由于不产生反溅物,β等于1。
因此,撞击过程的设计目标:①最大程度的动量传递;②动量增益因子最大。在探测器和小行星组成的系统中,动量传递过程遵循动量守恒定律。动量增益因子β一方面由小行星目标特性决定,如小行星的材料成分、孔隙度、断裂强度等;另一方面也由撞击体特性决定,如撞击体的质量、速度、形状等。
对于近地小行星防御任务来说,目标的材料、强度、孔隙度等特性是小行星固有的属性,目前并不完全掌握,需要航天器通过一定的裕度设计来适应。撞击效果优化的重点在于撞击体自身及其运动特性的设计,包括撞击方向、撞击体形状等,兼顾航天器设计的固有约束,优化撞击效能。
1)撞击方向分析
根据高斯摄动方程:半长轴的变化仅与切向推力有关。
分别分析了以正后方为中心,沿偏下方60°、偏下方30°、偏上方60°、偏上方30°、偏法向30°共6个方向给小行星施加速度增量5 cm/s后小行星相对地球的运动轨迹随时间的变化(如图7所示),可以看出撞击器从正后方撞击小行星的时候,其偏转距离最远,与高斯摄动方程指出的切向方向最优理论结果是一致的,因此,从小行星正后方(正前方)撞击是最优的选择。
图7 不同撞击方向小行星偏转距离比较Fig.7 Comparison of asteroid deflection distances in different impact directions
2)撞击体形状分析
使用autodyn软件,采用几何缩比方法对平板型、球型、锥型3种撞击构型进行仿真,结果如图8所示。仿真过程中,速度不变,撞击器、小行星尺度都为原尺度的1/1 000,这样确保撞击过程的材料相变效应、作用时间与真实撞击一致,速度效应规律相同。撞击后成坑效果如图9所示,可以看出撞击坑均为接近碗形的典型撞击坑,撞击坑半径与体积基本不受撞击器形状的影响,偏差在5%以内。

图8 不同形状撞击器Fig.8 Impactors of different shapes
图9 小行星撞击后成坑效果图Fig.9 Rendering of the crater created by the asteroid impact
撞击后小行星速度变化如图10所示,可以看出平板型、球型和锥型在撞击方向速度变化接近,偏差在10%之内,平板型的略高。考虑仿真的不确定性,可近似认为撞击体形状对小行星速度改变的影响可忽略。
图10 小行星速度变化Fig.10 Asteroid velocity variation
此外,研究人员对截面积较为接近的球形、柱形、厚柱筒、薄柱筒、柱筒+实心球、柱筒+空心球6种形状的撞击器,撞击不同内聚强度多孔玄武岩材料小行星的结果进行了分析。分析结果表明,对于内聚强度较弱(1 kPa以下)的目标小行星,球型撞击器动量增益因子比其它形状大2%。对于内聚强度较大(0.1 MPa以上,内聚强度越大越接近于独石)的目标小行星,柱形、柱筒+实心球撞击器的动量增强因子比球体提升3%,薄柱筒比球体降低3%,厚柱筒与柱筒+空心球相比球体撞击器相差不多。整体而言不同形状撞击器对动量增益因子的影响在10%以内,且随着小行星内聚强度的下降,影响程度有所减弱。考虑仿真的不确定性,可近似认为撞击体形状对动量增益因子β的影响可忽略。
3)撞击控制任务分析
撞击控制任务的主要需求及难点有以下几个方面。
(1)小行星的形状、自转和反照率等参数不确定大、几乎未知,亮度极低(暗弱、星等高),这些给实现小尺寸暗弱目标小行星的超远、远和近距离高精度在轨自主观测和导航信息提取提出了很大挑战。
(2)小行星的地面测轨精度低(星历误差200~1 000 km)、地面测控无法提供撞击器相对目标的高精度导航;撞击器相对目标小行星的飞行速度快(5~10 km/s)、轨道修正次数多,超远和远距离相对目标天体的在轨测量手段有限(目前只有光学成像),这些给实现高速飞行环境下的高精度相对目标自主导航提出了很大挑战。
(3)小行星高速撞击精度要求高,逼近段和撞击段姿态、轨道控制耦合严重,需要制导与控制一体化来实现速度方向的快速跟踪、快速稳定控制;受推力器大小、飞行时间约束,末期修正量限制严格,需要实现多约束下的自主轨迹规划,这些给实现高速飞行环境下的高精度自主规划、制导与控制提出了很大挑战。
根据撞击控制任务的特点,确定撞击过程的初步导航方式见表2。

表2 小行星撞击任务导航方式Table 2 Navigation methods of asteroid impact missions
2.2 评估任务分析
撞击效能评估是指对通过动能撞击导致小行星物理特性的改变进行评估,主要包括轨道变化评估、地形地貌变化评估、溅射物评估3个方面。
1)轨道变化评估
观测器在撞击前后会在与小行星相对固定的距离停泊,观测器测定轨数据及其与小行星的相对测量数据,都可作为评估轨道变化量的辅助信息。
利用观测器在小行星日心轨道坐标系下测定轨数据,修正小行星的轨道预报模型,从而对小行星未发生撞击的状态下半年后原本该处于的位置进行精确预报,通过与小行星被撞击半年后实际所处位置比较,评估轨道的变化。
而若要求撞击后能够对小行星的轨道变化进行精确评估,则撞击前小行星轨道预报的误差需远小于小行星轨道的实际变化,一般差别在3倍以上,因此要求提前半年轨道预报误差优于百千米量级。
2)地形地貌变化评估
撞击前后的地形变化,如撞击坑的直径、深度可以最直接表征撞击的效果。而小行星表面纹理稀疏,通常大片都光滑无特征,这就对三维建模算法的特征识别能力提出了很高的要求。地形地貌变化的评估需求主要包括以下2方面。
撞击坑评估:包括撞击前的天然撞击坑的直径和分布评估,以及撞击器撞击小行星形成撞击坑的直径和地形起伏测量。前者通过对天然撞击坑密度分布来推断小行星表面的年龄,后者对撞击坑的地形剖面进行分析,评估的对象直径可能在数米至十数米量级,深度在数米量级;
石块尺寸分布评估:“隼鸟2号”对撞击坑内的石块尺寸和坑外石块的尺寸大小进行了对比,发现坑内石块大小降至坑外平均大小的1/3,对比撞击坑内外的石块尺寸大小,可以获取小行星次表层物理特性的更多信息。评估的石块尺寸一般为厘米级。
综上,为能够精确分辨撞击前后地形地貌的变化,数字正射影像图(Digital Orthophoto Map,DOM)的分辨率要优于厘米级,数字高程图(Digital Elevation Model,DEM)的水平分辨率和高程精度要优于10 cm级。
3)溅射物评估
溅射物分布是表征撞击效能和动能作用机理的重要依据,在高速撞击阶段,小行星的结构会产生强烈的变形及局部的断裂破碎形成溅射物,通过溅射物的运动状态可实现对目标小行星孔隙率、密度、分子间作用力的评估,进一步明确小行星受高速撞击后的动力学响应机理,这就对溅射物发散角、切向速度和径向速度提出了较高的测量要求。探测器需配置高分辨率相机以优于0.1 m的分辨率对撞击过程产生的溅射物进行清晰成像。
2.3 载荷需求分析
小行星撞击防御任务的设计重点在于对小行星精准撞击和撞击效果精确评估。而靶体对撞击效能的影响因素主要包括小行星基本参数、材料参数、结构、形貌等4类,如表3所示。因此,需围绕靶体参数的精确测量,配置科学载荷,获得目标小行星的大小、质量、孔隙度、结构、形貌等详细参数描述,从而为撞击效能的评估提供支撑。
表3 影响撞击效能的主要靶体参数Table 3 Main parameters affecting impact efficiency
针对表3中靶体参数测量需求,初步对有效载荷配置需求如表4所示。

表4 初步载荷配置需求Table 4 Load configuration requirements
3 任务方案设计
与已有的地外天体撞击任务“撞击+掠飞观测”的任务形式不同,为解决当前小行星撞击防御任务方案中对撞击效果系统性、精确性评估不足的问题,特别是缺乏系统有效天基评估手段的问题,本文提出“伴飞观测+撞击+伴飞评估”的任务方案,在实现高精度撞击的同时,全面准确地评估撞击效能。任务的整个过程包括撞前小行星伴飞观测、小行星撞击和撞后小行星伴飞评估3个阶段。3个阶段的任务分别由观测器和撞击器2个探测器实现,观测器需要早于撞击器数月到达小行星。
任务的飞行过程如下:观测器和撞击器通过一箭双星的形式发射,两器入轨分离,以不同的轨道飞向撞击目标。
观测器从地球到小行星采用直接转移轨道,经深空机动和中途修正到达小行星后实施交会并开展数月科学探测,包括伴飞定轨、小行星地表三维观测建模、物质成分探测以及内部结构测量。撞击器与观测器一起发射,采用不同的直接转移轨道,途中进行深空机动和数次中途修正,撞击器自主捕获到小行星后,采用自主导航控制策略实现与小行星的撞击。观测器观测和记录撞击过程,对撞击溅射物形成过程进行探测,随后开展伴飞定轨、小行星地表三维观测等工作,并与撞击前数据对比,联合地面观测分析轨道变化、撞击坑演化等完成撞击效能评估,如图11所示。

图11 小行星撞击防御任务“伴飞观测+撞击+伴飞评估”方案示意图Fig.11 Schematic diagram of the asteroid impact defense mission “observation+impact+evaluation” plan
3.1 撞击任务设计
撞击器通过逐段逼近的方式完成高速撞击过程,在距目标小行星40~50万km时,撞击器通过光学敏感器完成目标小行星捕获,此后采用自主导航的方式逐渐接近小行星,通过自主控制在每一个飞行阶段逐步收敛撞击点偏差。在最后的撞击段飞行过程中,撞击器通过高精度的自主导航和快速机动,经过3~5次修正,实现小行星的精准撞击。
小行星撞击精度主要由导航误差和轨道控制误差决定。导航误差主要取决于敏感器测量和数据处理精度,轨控误差主要受推力器执行误差、加速度计测量、姿控和制导解算误差影响。基于中国小行星探测及采样任务“天问二号”针对窄视场导航敏感器、图像处理、自主导航与控制算法技术的攻关,进一步提升硬件水平、优化控制算法及策略,探测器在大约(40~50)万km捕获目标小行星并接近飞行过程中,采用逐段收敛的方法进行误差修正如图12,最终实现撞击精度满足任务需求。
3.2 在轨评估任务设计
观测器对撞击效能的在轨评估观测主要包括3方面内容:轨道变化、地形地貌变化及溅射物观测评估。轨道变化评估:撞击前观测器悬停在小行星附近开展伴飞测量,地面对观测器进行多次长时间测定轨,并通过测量观测器与小行星的相对位置关系,反演高精度的小行星轨道数据,同时据此对小行星进行高精度轨道预报。撞击后,再次通过伴飞对小行星测轨,并和撞击前的轨道预报数据比对,实现小行星撞击前后轨道变化评估,如图13所示。
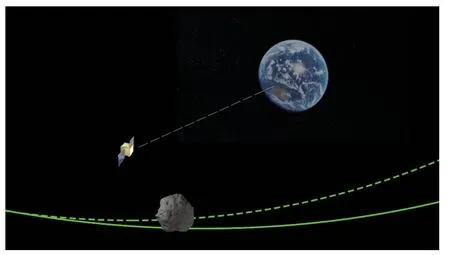
图13 小行星伴飞测量评估示意图Fig.13 Schematic diagram of measurement and evaluation of spacecraft accompanying asteroid flight
地形地貌变化评估:观测器开展悬停探测实现小行星地形地貌三维建模,如图14所示。首先通过多点探测获取俯视、前视、右视的图像,建立初始的形状;然后依据小行星表面特征选取面片,将三维表面模型划分为不同的块;将光学影像映射(配准)到每块面片,利用最小二乘方法拼接和全局优化各面片,得到高分辨率的小行星三维表面模型。并与激光一体化导航敏感器扫描的全球高精度点云数据进行融合,最终获得高精度DEM模型。三维建模过程在撞击前后各进行一次,通过2次DEM模型的对比,实现小行星地形地貌变化评估。

图14 小行星地形地貌三维建模Fig.14 3D Modeling of asteroid topography and landform
溅射物观测评估:撞击过程的溅射物观测由观测器携带的高分辨率相机完成,观测器在与撞击方向垂直的方位进行观测是最优选择,考虑光照条件以保证观测效果,观测位置的选择需满足太阳–目标小行星–观测器夹角50°~70°。考虑观测器在轨安全工作,观测位置距离小行星保持数10 km安全距离,撞击过程溅射物观测如图15所示。

图15 撞击过程溅射物观测Fig.15 Observation of sputtering during impact process
4 结 论
近地小行星对地球安全的潜在威胁一直存在,进行小行星防御,是人类保护地球家园的必然需求。本文在对小行星防御的研究现状进行分析的基础上,对当前成熟度较高、具有工程实施性的动能撞击防御手段进行了详细的任务分析,并据此提出了“伴飞观测 +撞击+伴飞评估”的小行星撞击防御方案,通过观测器提前抵达并对小行星的伴飞探测,获得小行星受撞前的轨道、地形、自转等精确信息,通过撞击过程中观测器的全程观测获得溅射物的详细分布,通过撞击后观测器的伴飞评估,获得小行星受撞后的轨道、地形、自转等详细信息,并通过撞击前后的比较,从轨道变化、地形变化、溅射物分布3个方面全面的、精确地评估撞击效能。与已有的“撞击+掠飞观测”方案相比,通过一次任务即可实现动能撞击和天基观测,且效能评估更全面、评估数据更精确,可以为未来中国首次小行星防御任务的实施提供重要参考。
