考虑舒适性的自动驾驶轨道列车牵引电机节能控制
2023-10-24高熙贺
高熙贺
(杨凌职业技术学院交通与测绘工程学院,陕西 杨凌 712100)
0 引言
轨道列车自动驾驶[1]是轨道交通迈向智能化的关键一步,在轨道交通日益发展的环境下,乘客对轨道列车的准时性、安全性、舒适性[2]以及节能性等提出更高的要求。为此,在启动、加减速等不同工况下的自动驾驶轨道列车牵引电机控制优化[3],对满足乘客舒适性和安全性等需求具有重要意义。
李学明等[4]基于轨道列车实际行驶数据构建牵引电机效率与牵引力及行驶速度之间的数学模型,根据模型计算各个牵引力分配策略下牵引电机能耗等指标,选取目标函数值最小策略作为最终分配策略,实现牵引电机节能控制。但是该方法受启动、加减速等工况下的列车速度影响,造成停车精度出现一定的偏移。黄江平等[5]分析并建模列车控制优化问题,在粒子群优化算法中加入自适应惯性权重、动态学习因子以及惩罚函数,通过改进的粒子群优化算法求解优化问题,实现牵引电机节能控制。但是该方法受粒子群算法自身影响,其控制过程中需要大量的计算,造成最终的控制结果能耗较高。贾宝通等[6]分析自动驾驶轨道列车的受力情况,基于牵引计算的动力学方程、轨道列车性能和行驶路线等情况构造轨道列车最小行驶能耗模型,以轨道列车和工况改变点为决策变量,采用全局人工蜂群算法求解模型,实现牵引电机节能控制。但是该方法受制动工况的影响,导致其在精准停车和准点中表现较弱。
为此,提出考虑舒适性的自动驾驶轨道列车牵引电机节能控制方法。
1 牵引电机节能控制目标函数构建
在自动驾驶轨道列车牵引电机节能控制目标函数构建时,预先建立轨道列车运动学模型,以此为依据分析不同工况下的牵引电机能耗。
1.1 轨道列车运动学模型
依据牛顿第二定律,轨道列车运动学模型为
(1)
F(v)为轨道列车行驶中受到的力,包含牵引力和制动力2个方面;Fr(v)为基本行驶阻力;Fw(s)为线路附加阻力;v为列车行驶速度;s为列车所处位置;t为列车行驶时长;M为列车质量;当列车为牵引工况时,Ft+(v)为牵引力,Ft+(v)为正值;当列车为制动工况时,Ft-(v)为电制动力,Ft-(v)为负值;Fb(v)为列车空气阻力;γ、d(r)和e(l)分别为列车所处坡道的坡度值、单位曲线附加阻力和单位隧道附加阻力;g为重力加速度;ε1、ε2、ε3为3个与列车型号和线路相关的固定参数。
轨道列车行驶全过程需要满足线路起点约束、终点约束、初始位置、终点位置、初始状态约束以及牵引制动特性约束。则轨道列车行驶过程中受到的基本约束为
(2)
s0为轨道列车行驶线路初始位置;sf为轨道列车行驶线路终点位置;vlim(s)为线路限速,该值随线路位置的改变而变化;v(s0)为列车初始速度;v(sf)为列车终点速度;Ft-max(v)、Ft+max(v)和Fb-max(v)分别为列车速度为v时的电制动力最大值、牵引力最大值和空气制动力[7]最大值。
1.2 不同工况下的牵引电机能耗
牵引电机是自动驾驶轨道列车的主要动力装置[8],牵引电机能耗在轨道列车行驶成本中占比较大。轨道列车牵引行驶过程可分为启动、牵引、巡航、惰行和制动5种基本控制模式[9],行驶线路路况主要有平道、上坡、下坡、连续上坡、连续下坡以及若干组合路况。
1.2.1 牵引电机能耗
在轨道列车正常行驶中不对紧急制动情况加以考虑,制动前列车仅需要经过加速、巡航和惰行3种模式。假设列车行驶于第o个坡道,该坡道长度为So,在坡道上转换控制模式前列车行驶时长为to1,行驶距离为So1,在该坡道剩余路程中列车行驶时长为to2,行驶距离为So2,起点实际速度为vo-1,终点预期速度为vo,则在该线路中控制策略有如下3种:
a.轨道列车加速到预期速度后匀速行驶到达坡道终点,或列车当下速度大于预期速度,惰行到预期速度后匀速行驶到达坡道终点,用a表示列车加速度,在速度为v时,列车单位牵引力为f(v)、单位行驶阻力为fr(v),线路附加阻力为fw(s),μ为牵引控制系数,λ为回转质量系数,则该控制策略下to1、So1、to2和So2为
(3)
结合式(3)可得到轨道列车在该策略下牵引电机能耗Eo,即
(4)
η为电机牵引效率。

(5)

(6)
(7)
(8)
1.2.2 制动电机能耗

(9)

综合牵引电机能耗和制动电机能耗,得到轨道列车在两站间行驶总时长Ts和牵引电机能耗E为
(10)
1.3 轨道列车牵引电机节能控制目标函数
假设一列自动驾驶轨道列车在两站间行驶并依据行驶图规划时间到达终站,该列车在行驶中共转换控制模式n次,则电机能耗目标函数为
(11)
Ez为列车在5种控制模式中每个子区间电机能耗。
以行驶速度、舒适性、准时性和精确停车分别构建目标函数约束条件,如下所示:
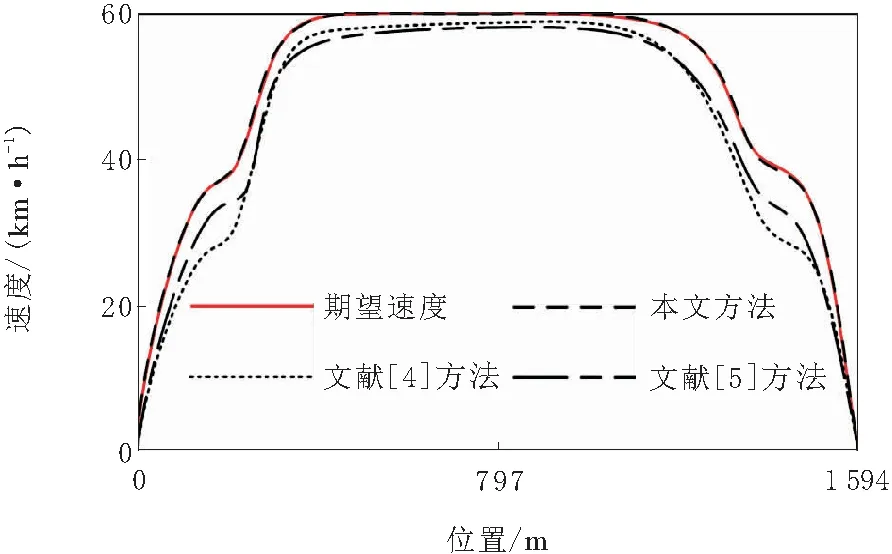
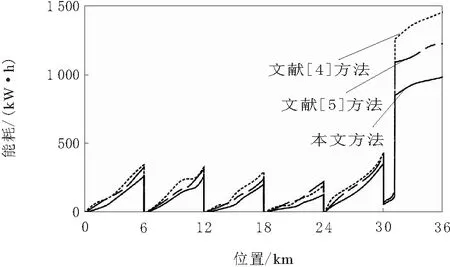
a.行驶速度。用v(s)表示轨道列车当前行驶速度,V(s)表示限制速度,列车需要依据弯道、坡道等路况,固定、移动闭塞行驶前后2列列车间距、前车行驶速度等多种因素,确定列车限制速度[10],即0 b.舒适性。加速度的改变会影响乘客的舒适性体验,加速度变化率即冲击率,用Δa表示加速度变化,Δt表示时间变化,则冲击率J=Δa/Δt。冲击率与舒适性呈负相关,因此轨道列车在启动、加减速和制动阶段需要将冲击率控制在一定范围内。 c.准时性。用Tt表示轨道列车预期行驶时长,To表示实际行驶时长,构建准时性惩罚函数f(T)=|To-Tt|/To。为降低电机能耗,所提方法以不提前于预期时间到达为时间规划策略。 d.精确停车。用S表示两站间距离,St表示列车实际行驶距离,构建精确停车惩罚函数f(S)=|S-St|/S。轨道列车停站时需要满足停车精度要求。 为求解自动驾驶轨道列车牵引电机能耗目标函数,提出混合差分进化算法。 (12) (13) 标准差分进化算法存在搜索精度不足、寻优效率较低及易陷入局部最优等问题,因此将混沌算法和蛙跳算法引入差分进化算法,提出混合差分进化算法,提升差分进化算法性能。 本文引入蛙跳算法用于差分进化种群中较差个体的深度搜索,提升差分进化算法的全局寻优能力[15]。将种群依据适应度排序后,选取适应度较差的部分个体,对该部分个体执行蛙跳局部更新,主要步骤如下所示: a.按照适应度降序排列种群后将种群划分为g个族群,划分第1个个体至第1个族群,第2个个体至第2个族群,以此类推,直到划分完成。 (14) c.当全部族群均完成个体更新后,采用新个体重新混合生成新差分进化种群。 本文将混合差分进化算法用于自动驾驶轨道列车牵引电机节能控制策略规划,主要流程如图1所示。 图1 混合差分进化算法流程 为了验证考虑舒适性的自动驾驶轨道列车牵引电机节能控制整体有效性,选取长度为1 594 m的线路,利用MATLAB软件搭建实验平台,模拟自动驾驶轨道列车牵引电机的结构,如图2所示。在 Intel i7 CPU、8 G内存,Windows 7 操作系统下实施仿真实验,测试考虑舒适性的自动驾驶轨道列车牵引电机节能控制。 图2 牵引电机结构模拟图 3.2.1 预期速度跟踪效果检测 以文献[4]方法和文献[5]方法为对比,统计本文方法、文献[4]方法和文献[5]方法在两相邻车站间的预期速度跟踪效果,结果如图3所示。 图3 预期速度曲线跟踪检测结果 由图3可知,本文方法与预期速度的差距更小,而文献[4]方法和文献[5]方法均与预期速度存在较大差异,说明本文方法具有更为优异的预期速度跟踪能力,更能够依据规划行驶,控制性能更强。 3.2.2 评价指标检测 为客观评价3种方法,以约束条件中的舒适性、准时性、精确停车和能耗为指标构建评价函数评价3种方法性能,则自动驾驶轨道列车电机能耗评价函数Φe、舒适性评价函数Φa、停车精度评价函数Φs和行驶准点率评价函数Φo表达式为 (15) r为时间t内行驶距离;S为两站间距离;Re为轨道列车预期停车位置;Rq为轨道列车实际停车位置;Uo为列车准点到达的站数;U为列车总共经过的站数。4项评价函数数值越小,则对应方法牵引电机控制效果越好,计算3种方法各项函数值,结果如表1所示。其中,行驶准点率表示是列车准点到达的站数(不算出发站)与列车总共经过的站数的比率。 表1 各项评价指标检测结果 由表1可知,本文方法的能耗和停车精度2项指标值均小于文献[4]方法和文献[5]方法,舒适性和行驶准点率2项指标均大于文献[4]方法和文献[5]方法,说明本文方法在节能性、舒适性、精准停车和行驶准点率中均具有更为优异的表现,更适合用于实际自动驾驶轨道列车牵引电机节能控制之中。 3.2.3 节能性和舒适性检测 为了进一步考察3种方法的节能性和舒适性,选取较长距离设计实验,实验路程为36 km,将该路程均分为6个区间,统计每个区间能耗以及全过程挡位变化,结果如图4和图5所示。 图4 轨道列车牵引电机能耗检测结果 图5 挡位改变检测结果 由图4可知,本文方法控制下的自动驾驶轨道列车牵引电机能耗在6个区间中均低于文献[4]方法和文献[5]方法,因为本文方法提出混合差分进化算法用于目标函数求解之中,加入混沌算法和蛙跳算法能够强化差分进化算法能力,进而得到更为优质的解用于牵引电机节能控制策略生成之中。 由图5可知,本文方法控制下的自动驾驶轨道列车挡位变化平均幅值较小,大部分每次变化一个挡位,而文献[4]方法和文献[5]方法存在大部分每次改变2个及以上挡位的情况,频繁且大幅度的挡位变化导致乘客舒适性变差,结合图3分析可知,本文方法在节能效果更好的同时更能够保障乘客舒适性。 为了解决控制策略在预期速度跟踪性、节能性、舒适性、精准停车和准点中表现较差的问题,提出考虑舒适性的自动驾驶轨道列车牵引电机节能控制。基于列车运动学模型分析牵引和制动电机能耗,建立牵引电机节能控制目标函数,采用提出的混合差分进化算法求解目标函数,完成牵引电机节能控制。实验结果表明:该方法能够较为准确地检测预期速度跟踪能力,依据规划路线行驶;节能性、舒适性、精准停车和行驶准点率各项评价指标均优于对比方法;考察节能性和舒适性,所提方法的能耗较低,挡位变化程度小,保证自动驾驶轨道列车的节能性和乘客舒适性;有效提升控制策略的表现,为轨道列车的智能化进程提供了思路。2 自动驾驶轨道列车牵引电机节能控制策略选择
2.1 差分进化算法




2.2 混沌算法






2.3 蛙跳算法

2.4 混合差分进化算法

3 实验设置与结果
3.1 实验设置

3.2 实验结果


4 结束语
