改进内置式永磁同步电机的无位置控制方法*
2023-10-21李红岩赵天玥安平娟杨朝旭王伟峰
李红岩,赵天玥,安平娟,王 磊,杨朝旭,王伟峰
(西安科技大学电气与控制工程学院,西安 710600)
0 引言
永磁同步电机由于其结构简单、易维护、体积小、成本低、可靠性高被广泛应用[1]。在永磁同步电机控制系统的位置环中,最早使用机械传感器获取转子位置,而机械传感器会存在增加制造成本,维护成本高等问题。随着技术的发展,已有对无传感器控制的大量文献和实验研究,它通过软硬件计算代替机械传感器避免了其生产和维护成本,拓宽了其应用环境,具有重要意义[2]。
无位置传感器的研究主要分为零低速和中高速部分。对于零低速的无位置传感器的研究主要为解决电机能否稳定启动的问题,研究的方法有开环V/F运行控制、I/F运行控制、高频旋转电压信号注入法、高频旋转电压信号注入法、载波频率成分法[3-4]。而中高速部分的无位置传感器控制研究是为了更好的控制电机在正常运行过程中的控制效果,增加其可靠性,主要方法有模型参考自适应法、扩展卡尔曼滤波法、滑模观测器法等[5]。滑模观测器法由于其结构简单,鲁棒性高而被研究最多,应用也最广泛[6],而到目前为止,对于滑模观测器研究的主要问题为电机运行时滑模自身特性所造成的抖振现象。
针对滑模控制固有的抖振现象,有研究表明可以通过改进其趋近率、符号函数来减小抖振。张祺琛等[7]通过将分段幂函数和双幂次趋近律设相结合的方法,对抖振现象有所改善。同时有研究将算法与滑膜观测器相结合来减小抖振,LEVANT、JAIME等[8-10]提出了结合超螺旋算法的二阶滑模观测器,并推导了其稳定条件,确定了超螺旋滑膜观测器能够稳定运行并有效削弱抖振。陶彩霞等[11]将模糊控制的算法与超螺旋滑模观测器相结合;韩方阵等[12]将粒子群算法与支持向量机相结合对超螺旋滑模观测器改进,都能一定程度提高其抗抖振能力,但也在一定程度增加了算法的难度。
现有的大部分研究采用结构更为简单的表贴式永磁同步电机建立数学模型,而内置式永磁同步电机由于其凸极性能产生的更大磁阻转矩,性能优越而被广泛应用。然而内置式永磁同步电机的滑模观测器设计也因为数学模型变得更为复杂。刘彦呈等[13]以内置式永磁同步电机为研究对象,在d、q两相旋转坐标系下设计滑模观测器并验证了其收敛性和稳定性,对内置式永磁同步电机滑膜观测器发展奠定了一定基础。
针对以上问题的分析,本文设计了一种基于定子电阻辨识的超螺旋滑模观测器,用超螺旋滑模观测器代替传统一阶滑模观测器,并在此基础上提出了更平滑的控制函数代替开关函数,有效削弱了抖振,最后通过对定子电阻的在线识别和反馈来避免动态运行中电机参数值随环境发生的变化,提高滑模观测器的观测精度和电阻参数变化时的鲁棒性。
1 传统永磁同步电机滑模观测器
基于静止坐标系下的滑模观测器的数学模型电压方程为:
(1)
式中:[LdLq]T为dq轴定子电感,ωe为角速度,p为微分算子,[uαuβ]T为αβ轴定子电压,[iαiβ]T为αβ轴定子电流,[eαeβ]T为αβ轴扩展反电动势,且满足:
(2)
电流状态方程为:
(3)
式中:Eα、Eβ分别为d、q坐标系下的感应电动势。
2 超螺旋滑模观测器的设计
2.1 超螺旋滑模观测器
LEVANT[8]验证了在超螺旋算法下,取合适的参数能够保证动态误差的收敛。其中基础的超螺旋算法为:
(4)
将式(4)带入电流状态方程可得:
(5)

将扰动项带入得到超螺旋滑模观测器:
(6)
滑模控制在电机中高速运行过程中也会有抖振现象,为削弱抖振、提高动态性能最常用也是最简单的方法就是通过调整切换函数,现在常用的准滑膜动态函数有:符号函数sign(s)、饱和函数sat(s)、连续函数θ(s)、双曲正弦函数tanh(s)、S函数sigmoid(s)等。研究发现越平滑的、趋近零点斜率越小的切换函数对抖振削弱效果越明显,因此设计了新型切换函数,并对他们的平滑度进行寻优。
图1a为现有常用的切换函数,通过他们的曲线波形可以得到sigmoid(s)函数的曲线最平滑。
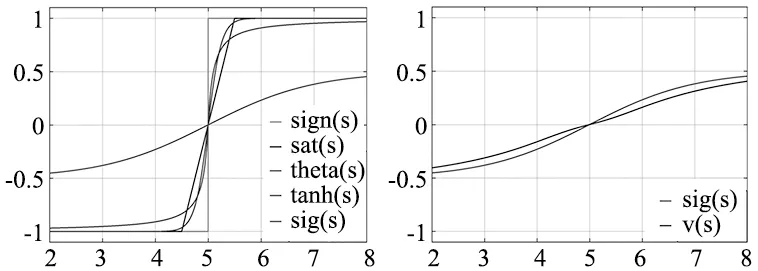
(a) 常用切换函数 (b) S函数与设计函数图1 切换函数仿真波形图
(7)
式中:a为函数斜率,a>0,其中a=1时,s函数的曲线达到最平滑的状态,抖振最小。本文设计了一种简单的准滑动模态函数v(s),其中,atan(ms)3项主要作用为当系统状态远离滑模面时可以加快收敛速度,当系统状态靠近滑模面时减小切换速度,该函数同样具有光滑连续特性。v(s)的表达式为:
(8)
通过与S函数波形的对比,v(s)函数曲线更平滑,零点附近的斜率更小。作为切换函数具有更好的抖振削弱效果。
2.2 锁相环
传统的基于反正切函数的转子位置估计方法会扩大滑膜控制的自身抖振,采用锁相环技术(PLL)可以获得更好的动态性能。PLL本质上是一个PI调节器,定义估计相角的误差Δθ,通过PI调节使误差为0,使其转子位置估计值收敛于转子位置实际值。基于PI调节的锁相环闭环控制框图如图2所示。

图2 PI调节的锁相环控制结构
由图2可以得到系统的系统的传递函数为:
(9)
3 定子电阻在线辨识
在永磁同步电机的运行中,随着电机的高速运转,电机的定子电阻也会升温而导致阻值受到影响。
在超螺旋滑模观测器的基础上,加入定子电阻辨识部分,在计算转子位置时对电机的定子电阻进行辨识,将得到阻值进行反馈,调节新的数学模型,使模型的参数更加精确,从而提高观测精度。定子电阻的辨识框图如图3所示。
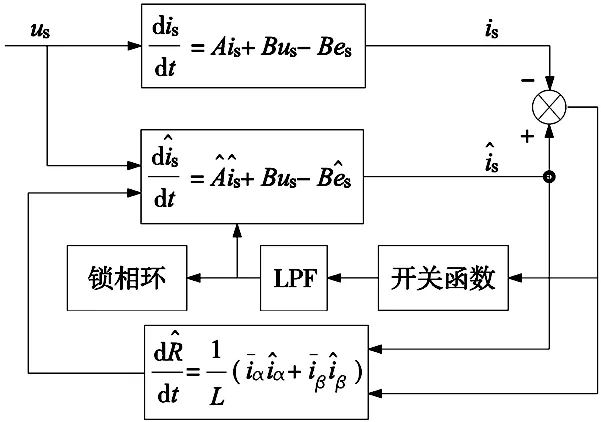
图3 含定子电阻辨识的滑模观测器
(10)
式(10)与式(3)两式相减,得到电流误差方程为:
(11)
根据滑动模态的存在性条件,选择Lyapunov函数为:
(12)
加入了定子电阻误差项,若要使系统满足滑模的稳定性,则要满足:
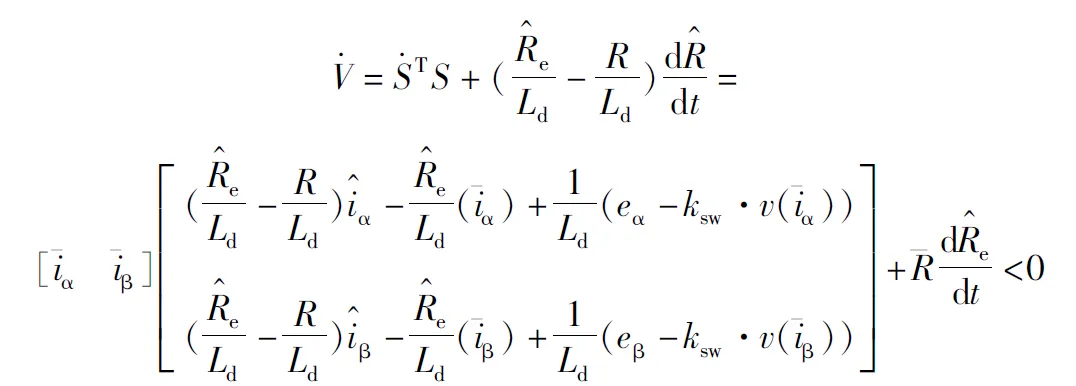
(13)
又因为:
(14)
所以令:
(15)
并可以以此得到定子电阻的估算方程为:
(16)
通过定子电阻辨识得到的定子电阻实时值,再将电阻值反馈给可调模型,使模型的参数更准确,提高超螺旋滑模观测器的精度。
4 实验验证
本文通过在研旭YXSPACE-SP2000实验平台上对永磁同步电机无位置控制方法进行搭建,来验证本文设计的改进超螺旋滑膜观测器的可靠性和有效性。实验平台如图4所示。

图4 实验平台
实验电机的参数如表1所示。
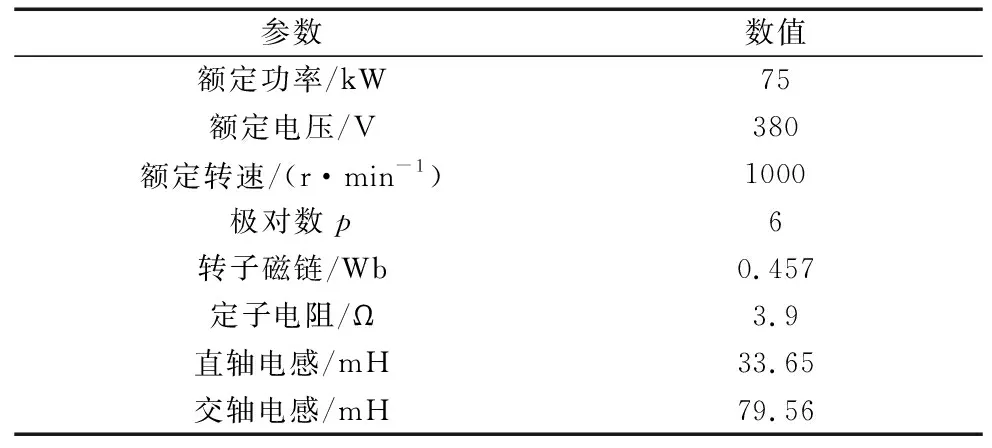
表1 永磁同步电机仿真参数
为了突出改进滑膜观测器的进步性,实验主要将改进超螺旋滑膜观测器与超螺旋滑膜观测器结合S函数控制系统(STA-SMO-S)进行对比,采用id=0的矢量控制方法。
4.1 转速、转子位置抖振性能实验
实验工况为:初始转速给定为500 r/min,此时为空载状态,在0.2 s时增加到1000 r/min,在0.4 s时,增加4 N·m负载。在同一工况下对以上两种方法进行比较。得到转速响应曲线对比、转速误差估计曲线、转子位置估计曲线以及转子位置误差估计曲线如图5~图8所示,并且其中图5a为改进超螺旋滑模观测器控制系统下的响应曲线,图5b为STA-SMO-S控制系统下的响应曲线。
(a) STA-SMO-S控制下转速响应 (b) 改进STA-SMO控制下转速响应图5 转速响应曲线

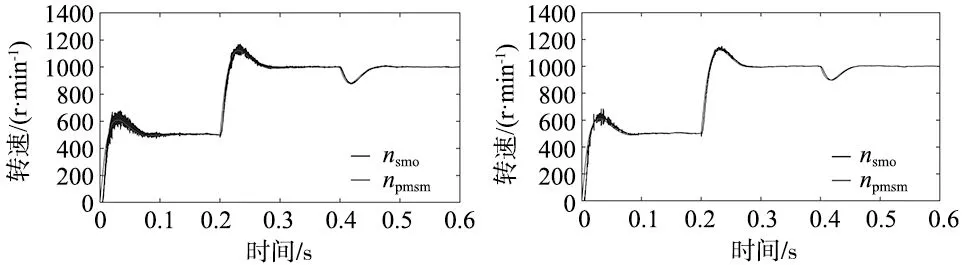
(a) STA-SMO-S控制下转速误差 (b) 改进STA-SMO控制下转速误差图6 转速误差估计曲线

(a) STA-SMO-S控制下转子位置 (b) 改进STA-SMO控制下转子位置图7 转子位置估计曲线

图8 转子位置误差估计曲线
超螺旋滑模观测器结合S函数作为开关函数的控制系统(STA-SMO-S)已比传统控制有了明显优化。但从图5a和图6a可以看出,STA-SMO-S控制系统下电机在中高速稳定运行中任伴随一定抖振,当发生转速和转矩突变时,也存在明显的超调和振动。
由图6和图8可以看到,在启动过程中,STA-SMO-S控制方法在空载启动时需要0.08 s达到稳定运行状态,在稳定运行过程中伴随6 r/min的转速误差;而改进超螺旋滑模控制器在0.025 s即可达到稳定运行状态,并在稳定运行时仅有4 r/min的转速误差,能明显看出改进超螺旋滑膜观测器的跟随观测效果更好,观测曲线更平滑。当转速突变和负载突变时,改进超螺旋滑模观测器的转子位置误差分别最高达到为0.1 rad和0.02 rad,优于STA-SMO-S控制下的0.17 rad和0.05 rad。说明改进超螺旋滑膜观测器能够有效削弱电机在中高速稳定运行时存在的抖振和提高电机运行时的抗扰动能力。
4.2 定子电阻辨识精度实验
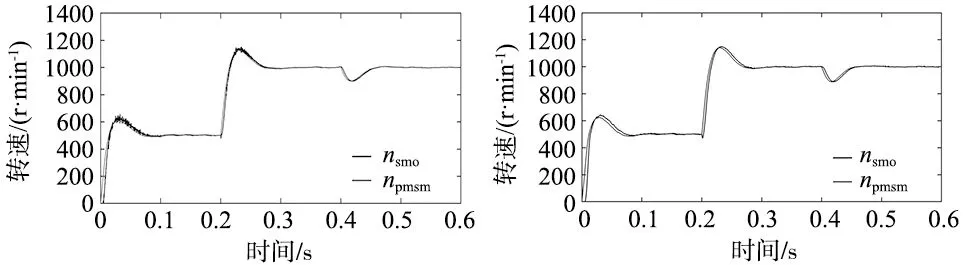
为了更好验证定子电阻辨识的跟踪观测效果,设定工况2:在工况1的基础上,定子电阻变为1.5 R。对两种方法再次实验。变参数的动态响应曲线如图9~图12所示。
(a) STA-SMO-S控制下转速响应 (b) 改进STA-SMO控制下转速响应图9 变参数转速响应曲线
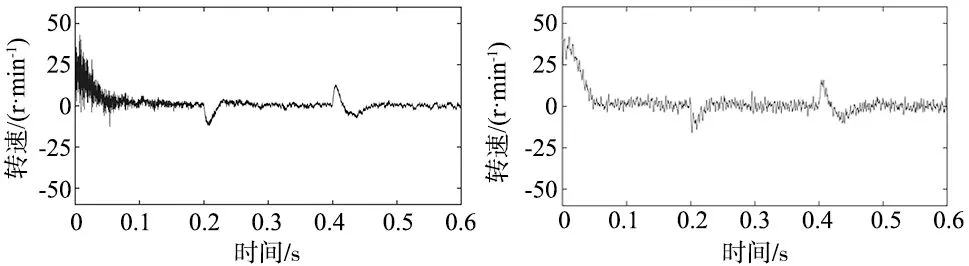
(a) STA-SMO-S控制下转速误差 (b) 改进STA-SMO控制下转速误差图10 变参数转速误差估计曲线

(a) STA-SMO-S控制下转子位置 (b) 改进STA-SMO控制下转子位置图11 变参数转子位置估计曲线
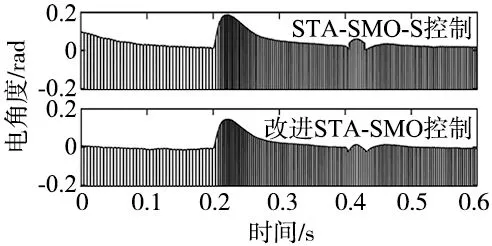
图12 变参数转子位置误差估计曲线
从图9、图10可以看出,当定子电阻参数变为原来的1.5倍时,在STA-SMO-S控制下的转速响应曲线相比改进超螺旋滑膜观测器下明显毛刺数量和抖振明显增多。电机启动过程中,STA-SMO-S控制下的转速估计误差抖振效果明显增多,而在改进超螺旋滑膜观测器下转速估计误差抖振更加稳定。从图11、图12可以看出,当电机转速和负载发生突变时中,改进超螺旋滑膜观测器下的转子位置估计误差分别有0.13 rad和 0.01 rad,小于STA-SMO-S控制下0.2 rad和0.08 rad的转子位置估计误误差。
说明当电机参数发生变化时,带定子电阻辨识的超螺旋滑膜观测器具有更高的观测精度,如果能够迅速识别参数变化并对系统进行调整,将有效提高电机运行的动态性能。
5 结论
针对滑模观测器在内置式永磁同步电机中高速运行过程中存在的抖振问题,提出了一套改进定子电阻辨识的内置式永磁同步电机超螺旋滑模观测器。在内置永磁同步电机更为复杂的数学模型上设计了超螺旋滑模观测器,能够充分削弱滑模控制自身存在的抖振现象;提出了新的开关函数,能够更好地减小抖振,提高在中高速运行过程转速负载突变时的抗干扰能力;结合了定子电阻辨识,实验证明能够使该系统在定子电阻变化时能够更好地稳定跟随。