面向临床的便携式膝关节康复检测系统设计
2023-10-19陈敬伟贾真张翼王靖邓华刘杨
陈敬伟,贾真,张翼,王靖,邓华,刘杨
1.中南大学 机电工程学院,湖南 长沙 410083;2.湖南省人民医院 关节与运动医学科,湖南 长沙 410021;3.湖南财方科技有限公司,湖南 长沙 410015
引言
膝关节是人体生理结构中最重要的关节之一,长期负重运动等易造成退行性病变[1],运动功能测试可直观检测膝关节功能,是临床医学实践中常用的评定治疗效果的方法之一,运动检测指标主要有膝关节活动度(Range of Motion,ROM)及肌力测试[2]。对膝关节患者康复过程中的功能检测可以直观反映患者当前恢复情况,同时为调整康复方案提供数据支撑。
目前,临床常以查体、拍摄平片等方法完成膝关节ROM 和肌力的分级打分,易受环境干扰和医生主观影响,缺乏对患者客观、精确的功能参数分析。对此,Locomat 下肢机器人等设备已开始探索性的进入国内外一线城市的大型医院以展开下肢辅助康复和测量工作,然而,造价高昂、管理困难以及操作复杂等特性也限制了其在临床上的进一步推广应用[3-5]。因此,目前有学者开展了便携式康复与测量设备相关工作,以辅助医生展开康复检测与评估工作,但相关方案存在自动化程度偏低、检测数据单一等不足[6-7]。基于此,本研究旨在阐述一种便携式膝关节康复检测系统的研制,以期为满足膝关节术后康复的检测要求提供一定的参考依据。
1 设计要求
膝关节术后患者在早期康复阶段肌肉萎缩严重,有一定的组织粘连,这个阶段关节ROM 偏小,肌力较低,根据该阶段肌肉特点,支具应具备以下特性。
(1)柔顺性。屈曲过程中在测量点添加刚性约束后进行肌力测量的方式会形成刚性冲击,从而给患者造成一定的心理压力,同时会带来潜在的二次伤害[8]。因此本文通过引入平面非接触式涡卷弹簧以提供患肢屈曲过程中柔顺的线性阻力,从而在改善使用舒适性的同时进一步提高患者康复主动性。弹簧的刚度系数k 表示其受到外力作用下的缓冲程度,k 值越小,表示相同外力作用下弹簧具备的缓冲空间更大,使支具表现出更好的柔顺性。因此,在保证量程与精度性能前提下,应尽量降低弹簧刚度系数k。
(2)阻力可变性。一般情况下,康复周期内患者最大输出肌力有明显的变化;同时,不同患者的下肢体征也有明显的差异。因此要求检测系统具备一定的按需调节能力,以此覆盖不同患者、同一患者不同周期的差异化需求,提高人群适用性。参考张亮[9]针对行膝前交叉韧带重建术后康复组21 例患者8 周内不同阶段患侧峰力矩的等速肌力测试,系统应至少具有三级阻力调节策略以应对膝关节术后早期2、4、8 周肌力测试需求,且量程分别不低于15、21、24 Nm。
(3)量程与精度。基于人体行走时膝关节屈曲活动范围[10],制定本文膝关节支具ROM 量程为90°,同时参考许玉林等[11]针对膝关节骨关节炎患者做肌力测试的研究,设置膝关节支具肌力量程0~25 Nm。以张文波等[12]提出的关节活动度测量方法为例,ROM 最大误差在1.6°时仍然在康复治疗方面起重要作用。因此支具ROM 最大误差1.6°,肌肉力矩最大误差0.5 Nm。
整体目标是设计一款便携式膝关节康复支具,该支具操作简单、有良好的人机交互性,可以在患肢屈曲过程中提供较为柔顺的线性阻抗,支具具备良好的阻力可变特性;同时具有足够的量程和良好的测量精度,从而保证数据有良好的临床参考价值。
2 系统设计
如图1 所示,便携式膝关节康复检测系统由检测支具、编码器、采集板以及人机交互软件组成。支具绑缚于患肢并跟随运动,编码器采集到模拟信号后发送至采集板,采集板采样、滤波后将数字信号传送至PC 交互界面加以展示。
2.1 支具设计
如图2 所示,利用柔性绑带将大腿两侧连杆绑缚于大腿上,固定盘通过螺钉连接于大腿两侧连杆从而完成固定。同理,利用柔性绑带将小腿两侧连杆绑缚于小腿上。小腿传动板通过螺钉连接于小腿两侧连杆从而保证其随小腿摆动,同时小腿传动板方槽与转轴方柱配合转动后通过两侧轴承可实现小腿传动板与固定盘的相对转动,从而实现支具小腿连杆与大腿连杆的相对转动。
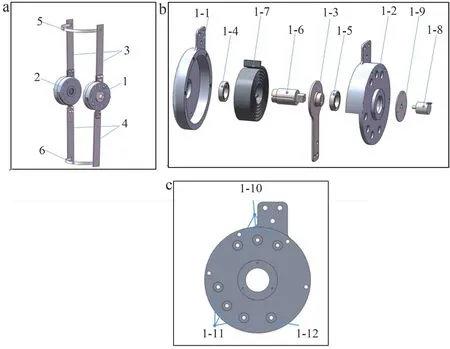
图2 支具示意图
使用时的人机交互场景对于支具的轻量化有较高的要求,因此支具大腿两侧连杆、小腿两侧连杆以及上、下端支撑环选用铝合金加工成型,从而在保证强度的前提下提高支具的柔顺性,降低其对于患肢的刚性约束。同时参考国标GB/T 10000-1988《中国成年人人体尺寸》[13],选取具有中国人人体膝关节尺寸特征的50 百分位尺寸,在此基础上方便更换支撑环以适应不同人群的需求。
2.1.1 角度测量模块
在支具外侧模块中,编码器外壳通过编码器固定盘固定于外侧模块固定盘盖板,编码器内部D 型转轴与小腿传动板右侧D 型槽间隙配合。患肢屈曲时小腿传动板摆动时带动编码器转动,从而实现膝关节ROM 测量的功能。
2.1.2 肌力测量模块
本支具选用外端可自由旋转的平面非接触式涡卷弹簧(以下简称“涡卷弹簧”)实现肌力测量,具有精度高、结构紧凑的特点,肌力测量原理是首先涡卷弹簧外侧折钩通过阻力销止动于固定盘,下肢屈曲时小腿传动板带动转轴,涡卷弹簧的内侧折钩与转轴上通槽紧配合随之转动,涡卷弹簧随下肢屈曲而收缩,小腿传动板上的大直径薄盘可有效防止涡卷弹簧收缩过程中的不稳定倾覆。因此,通过采集膝关节屈曲角度即涡卷弹簧收缩角度,结合其力学性能,可以获得膝关节对应屈曲位置下的肌力信息。相比圆截面,涡卷弹簧采用的矩形截面有更好的储能性,同时涡卷弹簧均布于支具内、外侧模块,以此提高屈曲过程中患肢两侧的稳定性。
对于平面非接触式涡卷弹簧,线材各截面均匀,无应力集中,而在内端固定支承点P 会出现较大的应力集中,是常见的失效点,肌力扭矩M 作用下,单侧涡卷弹簧在点P,计算方式如公式(1)所示。
式中,Z为长方形截面系数;b为截面宽度;h表示截面高度。
根据公式(1),由预期最大肌力和弹簧失效应力可以初步确定涡卷弹簧矩形截面尺寸。
单侧平面非接触式涡卷弹簧角位移φ与肌力扭矩M的关系如公式(2)所示。
式中,l为弹簧线长度;E为材料的弹性系数;I截面惯性矩,对于矩形截面,I=bh3/12。屈曲过程中基于屈曲角度θ(°)可得肌力扭矩M,计算方式如公式(3)所示。
基于公式(1)确定涡卷弹簧材料与结构参数,由公式(3)采集编码器角度信息,可获得对应位置下的膝关节肌力信息。
2.1.3 阻力调节模块
不同患者或同一个患者不同恢复时期的膝关节生理特性等均对支具提出了明显的差异化需求,特别是在肌力检测时需调整支具阻力。通过选择合适的阻力孔,可实现涡卷弹簧不同程度的预紧,以及在相同的屈曲范围内多层次的测量能力,并以此达到装置变阻力的目的,提高支具的适用性。本支具通过在固定盘以及固定盘外板上布置3 个间隔30°的阻力调节孔位,以此实现0~3 级阻力共4 级调整能力。其中0 级代表涡卷弹簧可无阻力自由转动,用于ROM 测量;1、2、3 级代表不同的预紧程度等级,用于肌力测量。在不同预紧程度i下的肌力M 的计算公式如式(4)所示。
式中,θi(i=1, 2, 3)表示不同预紧程度等级下的预紧角度,θ=30×(i-1)。
阻力销和止动销均是横向插入作限位功能,在固定盘盖板上设置磁环以吸附阻力销和止动销,从而避免其因支具偏置而向外滑落。
2.2 信号采集与处理模块
信号采集与处理模块对于数据质量影响极大,该支具选配的角度模拟信号选用PandAuto 公司p3015s-v1-cw360 微型霍尔传感器输出,该传感器结构紧凑、模拟型分辨率可达0.088°、同时线性精度为0.3%F.S,测量性能良好。选用Arduino Mega2560 作为采集板,按照需求设置板中程序后可向PC 端发送串口数据,采样率可达1000 Hz。
2.3 人机交互界面
人机交互界面通过MATLA GUIB2020a 进行设计,包含3 个独立的测量单元,分别为ROM 测量单元、肌力测量单元以及支持同时测量ROM 与肌力的综合测量单元。交互界面如图3 所示,数据界面默认仅显示数据,同时配置记录模块,记录相关数据用于离线分析,以便医生与患者针对康复数据在线查看与离线分析。
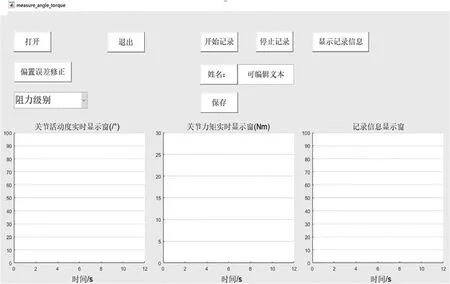
图3 系统综合测量交互界面
3 功能测试
3.1 测量前偏置误差修正
为保证舒适性,患者在康复的不同阶段或同一个康复阶段的多次测量中均存在绑缚姿态上的不一致的情况,不同的绑缚姿态会导致下肢与支具绝对零点间形成偏置误差,该误差是膝关节ROM 支具测量值与真实值间误差的重要组成部分。因此,本文设计的测量系统在测量前需完成偏置误差修正,即患者穿戴完毕,在医生指导下做数组必要的热身活动,随后尽力伸展患肢至最大伸展位并保持,此时测试人员点击PC 界面偏置误差修正按钮记录当前患肢初始偏置角度θ'。随后患者屈曲患肢,根据患肢屈曲过程中时刻i 编码器数值θ'i,则时刻输出到交互界面的患肢实际屈曲角度θi=θ'i-θ'0。该步骤可以保证患者在不同的绑缚姿态下总是以自身最大伸展状态为起点进行屈曲测试,从而有效降低随机绑缚带来的偏置误差。
3.2 测试现场
如图4a 所示,在测量关节ROM 时,选择性的插入限位销以防止患者早期康复时过度屈曲,随后交互界面点击打开按钮启动ROM 测量单元,患者准备完毕并做偏置误差修正后便开始测量,患者下肢主动且缓慢的带动支具屈曲,编码器向采集板发送角度模拟电信号,采集板按照一定频率采集到角度数字信号后发送至PC 交互界面,交互界面默认仅显示数据,同时ROM 测量单元配置记录功能,可收集数据用于后期分析。点击交互界面开始记录按钮开始记录,一段时间后点击停止记录按钮结束记录,姓名右侧输入栏记录患者姓名,随后可通过点击保存按钮保存数据。相关人员可通过点击显示记录信息按钮于记录信息显示窗查看上述离线数据。通常以3 个周期内动作获取稳定的膝关节ROM。
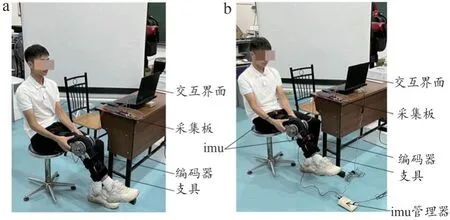
图4 膝关节功能测试实验
在连续测量肌力时,首先在装置未穿戴的情况下,根据患者需要选择固定盘盖板上不同的阻力孔,手动调节支具内、外侧小腿连杆使内、外侧模块平面非接触式涡卷弹簧外端折钩过所选阻力孔并插入阻力销,随后手动调整膝关节支架内、外侧小腿连杆,过程保护孔位置并插入回程保护销,由此可获得平面非接触式涡卷弹簧合适的预紧程度。穿戴膝关节装置,随后交互界面打开按钮启动肌力测量单元,准备就绪后做偏置误差修正并开始测量,根据阻力销位置,点击选择交互界面对应阻力级别,患者下肢主动带动支具屈曲,同上,PC 端交互界面可实时获得膝关节ROM,结合公式(4)表达的平面非接触式涡卷弹簧变形过程中阻抗扭矩和屈曲角度的映射关系,可获取患者肌力信息。同样的,可通过交互界面右侧按钮区记录患者关节力矩信息。医生或患者可利用交互界面肌力数据评估患者康复进展,调整康复方案,缩短康复周期,提升恢复效果。
4 系统性能测试
膝关节ROM 和肌力的测量均是基于编码器所测支具屈曲角度数据所得,因此对系统性能的测试以膝关节ROM 精度为准。屈曲过程中胫骨与股骨形成真实ROM值R1,PC 端通过采集板和编码器获取支具所测ROM值R2,为了获取R1,如图4b 所示,两部红色Xsens MTx(imu)测量单元分别置于大腿股骨上侧以及小腿胫骨前侧,imu 管理器获取imu 电信号后转换可得R1并发送至PC 端。该设备角度精度0.05°,重复精度0.2°。
5 测试结果
5.1 下肢屈曲活动度
选取4 名健康受试者(均为男性,年龄22 ~28 岁)参与系统性能测试实验,平均身高(173±7.00)cm,平均体重(70±15)kg。测试过程如下,测试人员在支具穿戴完毕后做5 次屈伸热身动作,随后下肢呈伸展状态完成偏置误差修正后开始做屈伸测试。屈伸时参考人体正常行进过程中膝关节矢状面的ROM 范围,测试人员在0~70°左右做屈伸动作,记录受试者在3 个完整周期内的R1 和R2 值,从而获得支具ROM 测量误差Re=|R1-R2|,2 号受试者第2 天的测试数据如图5 所示,每名受试者连续3 d 做相同的测试实验。对比1、2 级阻力模式,支具在3 级阻力下肌力误差最大,因此利用Re,结合公式(4)计算3 级阻力模式下肌力测量误差Te 以测试肌力精度。

图5 下肢屈曲活动度对比
5.2 系统精度测试结果
如表1 所示,4 名受试者膝关节ROM 测量Rmae ≤0.6°,Rme<1.5°;Tmae<0.15 Nm,Tme<0.4 Nm;3 d内受试者组内ICC为0.8988~0.9511。系统ROM量程95°,肌力量程28.4 Nm;系统所用弹簧刚度0.2989 Nm/°,系统包括三级阻力模式,对应量程分别是16.89、24.38、28.40 Nm。
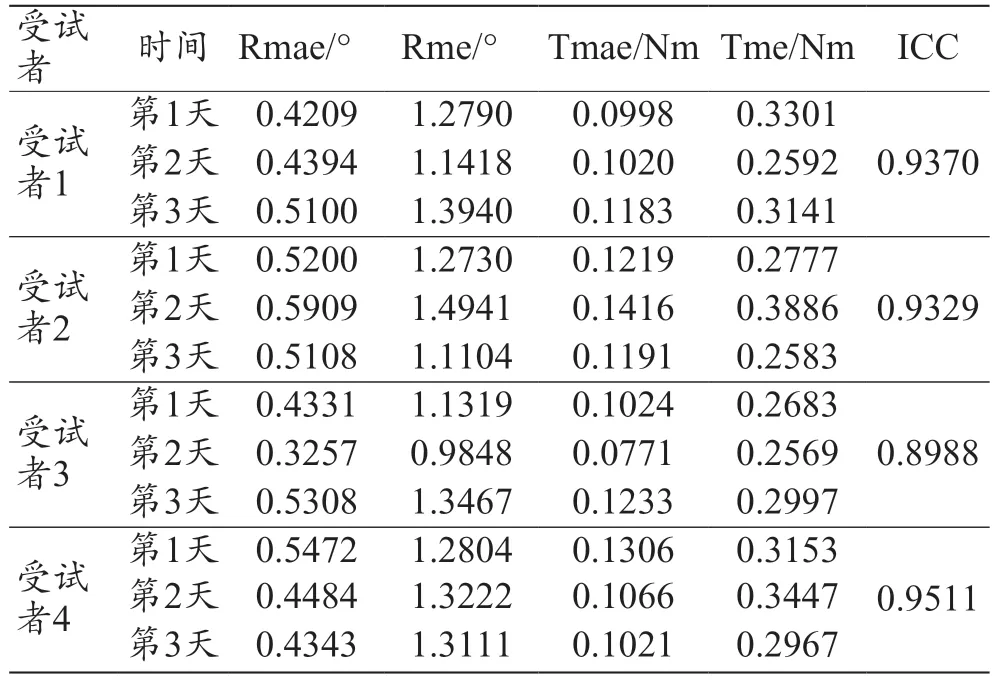
表1 系统精度测试结果
6 讨论
本研究分析了4 名健康受试者连续3 d 的测试数据,结果表明,本文提出的偏置误差修正策略将Rme 降低至了1.5°。对比张文波等[12]基于Azure Kinect 提出的关节活动度方法,其Rme 为1.61°,说明本文提出的测试方案具备有效的ROM 测试效果。在三级阻力下的Tme不超过0.4 Nm,3 d 内受试者组内ICC 为0.8988~0.9511。优于其他研究者对手持式测力仪在下肢肌力测量中的信度研究[13-17],这体现了本文基于外骨骼测试肌力的优越性。
活动度量程为95°,肌力量程28.4 Nm,满足膝关节术后患者早期康复检测需要[10-11]。本文借鉴机器人应用领域中柔性关节的思想[18-19],将弹簧引入膝关节肌力测量,在保证前述量程的前提下选择了较低水平的刚度系数(0.2989 Nm/°),保证了支具良好的柔顺性能;同时通过间隔预紧的方式保证了支具具备三级阻力,量程分别是16.89、24.38、28.40 Nm,符合膝关节术后患者早期2、4、8 周肌力测试需求[9]。
但本文通过选择正常人参与实验以验证系统性能,缺乏膝关节萎缩患者相关的验证实验。作为一款测量系统,其具备的活动度和肌力测量精度仍能为精细跟踪膝关节术后患者早期康复进程提供保证[12,17],同时,其活动度和肌力测量范围可以满足膝关节术后患者早期康复的检测需求[9-11]。系统所测ROM 平均绝对值误差集中在0.48°,略低于李文浩等[14]基于光学定位设备开发的关节活动度测量系统所得到的平均绝对值误差0.21°;有研究者在外骨骼人机交互的研究中表明,受随机绑缚、人机转动轴线错位等因素影响,膝关节外骨骼与人体总是会存在一定的活动度误差[15-16]。本研究结果表明,误差可能随下肢屈曲按照一定规律波动,与相关研究者对膝关节人机交互活动度误差的研究结果一致[20-23],目前相关研究者主要从外骨骼结构和人体下肢生理模型两个方面进行研究与改进。因此,未来仍需对此误差展开深入研究,以降低ROM 测试误差,提高系统测量精度。
7 结论
本研究结果表明,在患者主动屈曲下肢的过程中,便携式膝关节康复检测系统可为患者提供安全、舒适的早期康复所需测量场景;为医生提供患者康复过程中的下肢屈曲角度和肌力等关键机能数据,从而帮助医生为患者制定精细的数字化闭环康复方案。支具的可变阻力特性满足了不同患者、同一个患者不同恢复时期的膝关节生理特性等差异化需求,使装置具备良好的舒适性和实用性。系统具备绑缚状态下膝关节活动度偏置误差修正功能,可有效降低下肢与支具间随机绑缚造成的活动度测量误差。测试结果显示,系统满足膝关节术后康复的检测要求,同时符合临床对康复进展跟踪和康复方案评估的需求。
