城市轨道交通障碍物探测系统设计方案研究
2023-10-19张晓林高新亚
张晓林 高新亚
1.四创电子股份有限公司 安徽 合肥 230088 2.青岛理工大学 山东 青岛 266520
伴随我国城市化进展,城市轨道交通以运量大、速度快、准时可靠等优势,在我国公共交通事业中发挥越来越大的作用[1]。然而,伴随城市轨道交通的高速发展,各类事故频发。影响城市轨道交通运营安全的主要因素有轨道障碍物因素、车辆因素、供电因素、信号系统因素以及人为因素等,其中轨道障碍物极易带来列车的破坏性撞击,造成重大事故[2,3]。
目前轨道障碍物探测主要分为车载和固定两种方式[4]。固定式布置于轨道沿线,探测范围有限,只能布置在重点、敏感区域,不能实现全运行区间的安全保障。事实表明单一的传感器手段,并不能可靠解决轨道障碍物的探测问题,若不考虑轨道交通特点,不充分利用轨道交通的先验知识,单纯从传感器的角度解决障碍物探测的技术问题,也会使问题复杂化,造成探测系统成本的极大提升,不利于系统的推广使用,不利于城市轨道交通运营安全的整体提升。
因此开展多传感器探测、传感器信息与轨道地理信息融合处理[5],低成本的轨道交通障碍物探测技术具有较大的市场需求和一定的迫切性。为提高障碍识别的成功率,本文采用毫米波雷达[6]、高速相机[7]、激光雷达[8]三种传感器同时进行障碍物探测。毫米波雷达探测距离远,探测范围大,不受天气影响,可靠性高,但受其波束宽度的影响,空间分辨率不高。高速相机分辨率高,目标识别率高,但距离测量难度大,精度低。激光雷达测量精度高,但探测角度小,难以覆盖全部探测空间。将雷达、相机、激光三者结合,用雷达解决探测距离、探测范围问题,用图像解决障碍物分辨、识别问题,用激光解决铁轨等重点关注区域问题,对探测信息进行融合处理,可以有效提高障碍物的检测概率。
1 轨道障碍探测系统组成及系统工作原理
本系统由雷达探测分系统、图像探测分系统、激光探测分系统、信息融合处理分系统和电源分系统组成。其中雷达探测分系统采用35GHz毫米波雷达,固定抛物面天线,脉冲工作方式;图像探测分系统采用双相机方案,一个相机用于障碍物探测,另一个相机用于交通信号灯的识别;为保证可靠性,激光探测分系统采用固定安装方式,不使用伺服系统,共安装两台,分别布置在两侧轨道的上方,用于检测轨道上方重点区域;信息融合处理分系统统一处理系统数据,完成雷达信号处理,图像处理,激光雷达同步控制,轨道地理信息处理,障碍物探测信息判决、显示、预警,运行信息存储等功能,采用嵌入式设计,ARM处理器+FPGA体系结构。系统组成框图见图1。
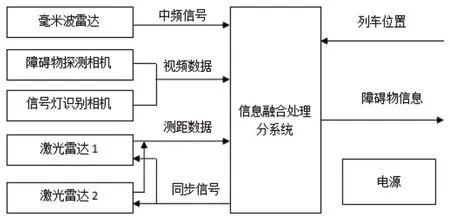
图1 系统组成框图
2 障碍识别方案
2.1 毫米波雷达障碍探测方案
雷达工作频率35GHz,作用距离80~250m,采用脉冲工作方式,收发共用天线。雷达信号脉冲宽度0.5us,峰值功率2W,波束指向精度1°。雷达由天线、发射机、接收机、频率源、信号采集与信息处理系统,原理框图见图2。其中发射机、接收机、频率源、天线为系统的射频模拟收发系统。
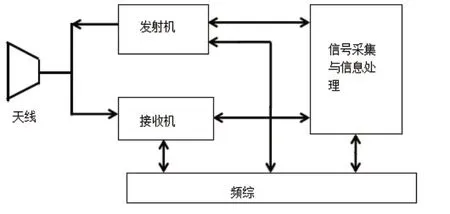
图2 轨道障碍物探测与识别系统组成原理框图
天线采用抛物面天线,具有较高的波束指向精度,增益42dB,带宽设计为5MHz,大于信号带宽2MHz。接收机具有一个发射支路和一个接收支路。中频信号2GHz,射频信号35GHz。发射支路输出功率1W,接收支路噪声系数6.5dB。收发支路共用本振。中频信号做正交解调至基带采样。
雷达信号由频率源产生2GHz中频,在接收机的调制器里受脉冲信号调制成为脉冲信号,上变频为35GHz射频信号由天线发射。调制脉冲的时宽和周期受到雷达探测距离的限制。脉冲宽度过窄,影响雷达发射功率,缩短探测距离;脉冲宽度过宽,增加近端盲区范围。时宽设计为0.5us,可以保证近端75m的盲区和远端300m的探测距离。信号周期可在线调整,并应大于2.5us以保证300m的探测距离。
2.2 图像探测系统方案
根据总体功能要求,图像探测分系统除完成障碍物检测外,还需要识别轨道交通信号灯。由于障碍物检测与交通信号灯识别对相机要求差异较大,因此图像探测分系统采用双相机方案,一个用于障碍物探测,一个用于轨道交通信号识别。
系统由障碍物探测相机、交通信号识别相机、数据处理分机等组成,其组成框图如图3所示。其中,图像探测分系统没有单独的数据处理分机,其数据处理功能在系统的信息处理分系统内完成,数据处理分机的组成见信息处理分系统。
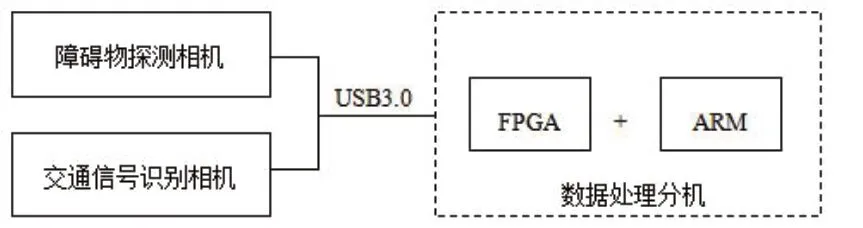
图3 图像探测分系统组成
2.2.1 障碍物探测
障碍物探测由数据处理分机的FPGA与嵌入式处理器共同完成。嵌入式处理器根据获取的列车地理信息,调取预存的轨道特征库发送给FPGA,并接收FPGA处理完成的障碍物识别信息;FPGA接收相机图像数据和嵌入式处理器的轨道特征库数据,进行图像处理后,输出障碍物探测信息。
图像处理主要通过图像预处理、限界识别和特征匹配三个步骤来进行障碍物检测。
(1)图像预处理
为改善图像质量,提升后续图像判读的准确性,首先要对接收的图像先进行图像预处理,主要包括图像增强、二值化等。
(2)限界识别
系统障碍物限定为限界内,首先应进行限界识别。轨道交通道路的最明显特征是两条铁轨,确定铁轨后向两侧延伸即为障碍物识别限界,本系统采用Hough变换的方法进行轨道识别。
(3)特征匹配
限界内的轨道图像特征十分明显,正常情况下只有铁轨和规则排列的枕木,具有明显的,易于区分的纹理特征,通过计算限界内图像的纹理特征参数与轨道地理信息系统预存的纹理特征参数的差值,设定门限,即可判定是否存在障碍物。
纹理是图像的基本特征,由灰度分布在空间位置上反复出现而形成的,因而在图像空间中相隔某距离的两像素之间会存在一定的灰度关系,灰度共生矩阵就是一种通过研究灰度的空间相关特性来描述纹理的常用方法。本系统通过比较相机图像中限界内的灰度共生矩与预存的该参数的差值来判定障碍物。
2.2.2 交通信号识别
交通信号的识别较为简单,只需要进行颜色与形状的匹配就可以。首先,嵌入式处理器获取列车位置,根据轨道地理信息,在信号灯进入列车视野内,向FPGA发出交通信号识别启动信号;FPGA接到交通信号识别启动信号后,接收相机数据,在图像数据中识别信号灯并判别颜色,向嵌入式处理器输出信号识别结果;最后,嵌入式处理器根据列车位置判断列车经过信号灯后,向FPGA发出交通信号识别结束信号,FPGA停止接收相机数据,信号识别结束。
2.3 激光探测分系统方案
激光探测分系统主要由激光器、发射接收光学系统、发射电路、接收电路、低压电源、信息处理器等部分组成,如图4所示。
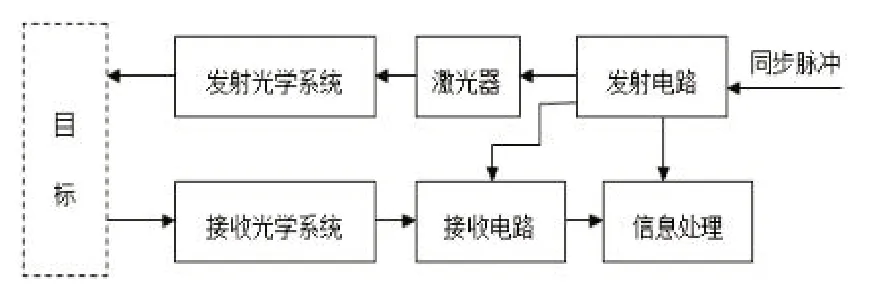
图4 激光测距机组成框图
激光探测分系统采用人眼不可见的近红外光源,波长905nm,脉冲体制测距,脉冲宽度30ns,重复周期100Hz。为同步多台激光雷达工作,避免相互干扰,采用外触发工作方式,同一时间段内只允许一台激光雷达完成激光发射和目标测量。发射电路主要由窄脉冲发生器、功率放大器、控制电路和激光器组成。接收电路主要由光电转换电路,放大电路和脉冲整形电路组成。
3 信息处理分系统方案
信息处理分系统完成全系统的数据处理工作、各分系统的控制功能、各传感器数据融合功能和对外接口的交互功能,主要包括数据处理分机和接口控制分机组成。数据处理分机完成系统所有数据处理、显示、通信、存储功能,接口控制分机完成各传感器同步控制,各传感器之间和系统对外的接口匹配功能。
数据处理分机采用ARM +FPGA结构。ARM处理器采用Cortex-A9处理器iTOP-4412,FPGA采用Xilinx公司 K7系列的XC7K325T。数据处理分机组成如图5所示。
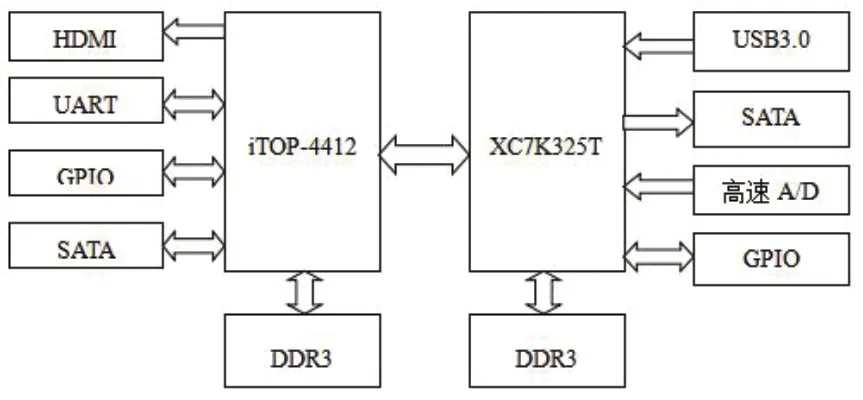
图5 信息处理分机组成框图
本系统采用嵌入式设计,选用Cortex-A9四核处理器,采用Android 4.4操作系统,完成系统的控制、显示、日志存储等功能,轨道地理信息根据轨道实际情况事先编制好,由该处理器依据列车提供的位置信息进行读取,完成传感器数据与地理信息融合处理,向列车提供预警信息。
4 结论
轨道上的障碍物极易造成严重的安全事故,为确保机车的安全运行,高准确度的障碍物识别尤为重要。本文提出一种将毫米波雷达、高速相机以及激光雷达相结合的障碍识别系统,三种障碍识别模块分别将识别信号传递给信息融合处理分系统,经该系统的综合判别可以成功地识别出障碍的尺寸和距离,为机车的提供可靠的运行方案决策。
