俄罗斯月球-25探测器失利影响分析
2023-10-18肖武平侯广厦张扬眉王帅
肖武平侯广厦张扬眉王帅
(1 北京空间科技信息研究所 2 中国空间技术研究院)

2023年8月11日,俄罗斯利用联盟-2.1b(Soyuz-2.1b)火箭将月球-25(Luna-25)探测器发射入轨,8月19日,月球-25探测器在进行轨道机动时发生异常,坠毁在月球表面。俄罗斯初步分析表明,事故由轨道机动超过预定时长导致。本文介绍此次任务基本情况并开展初步分析。
1 任务背景
“月球”(Luna)系列任务是苏联在20世纪50~70年代太空竞赛背景下进行的一系列无人月球探测任务,取得了全球首次绕月飞行、硬着陆、软着陆、采样返回等一系列举世瞩目的成就。除月球-25外,最近一次“月球”系列任务是1976年发射的月球-24,该任务成功完成了苏联第3次月球采样返回,此后47年内,苏联/俄罗斯未发射过月球探测器。
2006年,俄罗斯与印度政府间确定开展月球探测任务合作,规划了“月球-全球”(Luna-Glob)、“月球-资源”(Luna-Resurs)两次任务,其中“月球-全球”完全由俄罗斯实施,“月球-资源”由俄印合作实施。受到2011年“福布斯-土壤”(Fobos-Grunt)火星探测任务失败影响,采用相似技术的“月球-全球”任务进度大幅推迟,俄印月球探测合作停止,各自独立开展探测活动。
俄罗斯保留了“月球-全球”任务中的着陆器,并将任务更名为月球-25,延续苏联时期的命名方式。“月球-资源”任务中的轨道器和着陆器也被拆分为两次任务,分别被命名为月球-26和月球-27。月球-26轨道器旨在探测月球资源和月球轨道环境,支撑后续任务实施。月球-27着陆器计划着陆于月球南极-艾特肯盆地附近,探测月球永久阴影区域资源。
2 任务基本情况
任务目标
月球-25任务的科学目标包括:①调查和分析月球上水冰资源含量和分布情况;②调查月球极区外逸层的等离子体和尘埃成分。
月球-25任务的工程目标包括:①确保探测器按预定路线飞往月球;②在月球南极附近选定区域软着陆;③验证航天器在月面稳定工作以及月夜生存技术,保障仪器设备在月面运行一年;④利用远程和原位探测方法,对月面风化层、外逸层进行探测。
根据上述科学目标和工程目标,月球-25选择在月球南极附近着陆,具体地点为博古斯拉夫斯基环形山北部地区,坐标为南纬69.545°、东经43.544°。备选着陆点坐标为南纬68.773°、东经21.21°,位于曼奇尼环形山西南。月球-25原计划在月球表面运行1年。
系统组成
月球-25探测器总质量约为1605kg,干质量约为800kg,设计寿命1年。探测器分为上下两部分,上半部分是科学有效载荷舱,下半部分为基座。科学有效载荷舱侧面安装了月球机械臂(LRA),用于采集月球样本,机械臂长1.6m,总质量5.5kg,功率30W,最大功率50W,有方位角、肩部、肘部和腕部/挖掘铲等四个自由度。基座底部安装了“全景和局部成像系统”(STS-L),质量为4.6kg,能够在制动、下降和着陆过程中以及着陆后进行局部和全景成像。欧洲航天局(ESA)原计划在月球-25上搭载领航员-D(Pilot-D)导航相机,专门用于精确着陆,受俄乌冲突影响,ESA取消了合作。
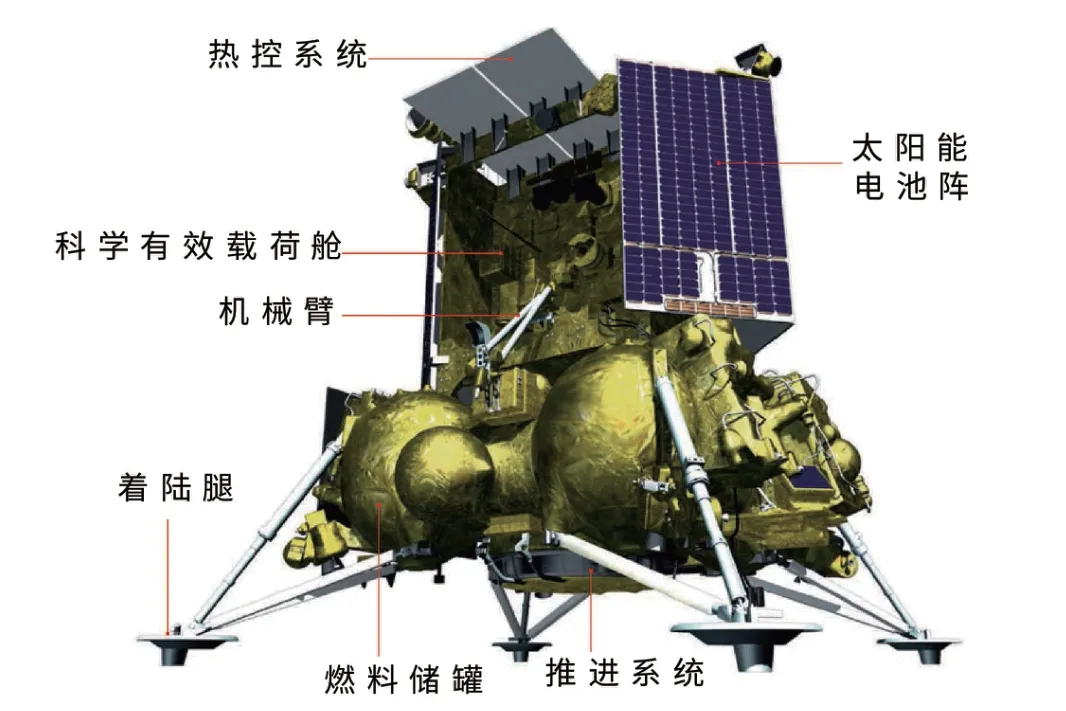
月球-25系统组成示意图
有效载荷
月球-25携带了6种科学有效载荷和2种技术试验载荷,总质量约30kg。

月球-25搭载有效载荷情况
3 任务实施过程
计划飞行方案
根据最初计划,月球-25任务于8月11日由联盟-2.1b火箭从东方航天发射场发射升空,随后“弗雷盖特”(Fregat)上面级进行两次点火,将探测器送入地月转移轨道,约1h后探测器与上面级分离。月球-25探测器在地月转移飞行过程中,分别于8月12日和8月14日进行了两次轨道校正机动。
月船-25进入月球引力影响范围后,于8月16日进行月球轨道注入机动,进入高度100km的环月轨道。探测器在环月轨道上停留约3天,于8月19日机动进入18km×100km的“预着陆轨道”,于8月21日在月球南极附近受控着陆。
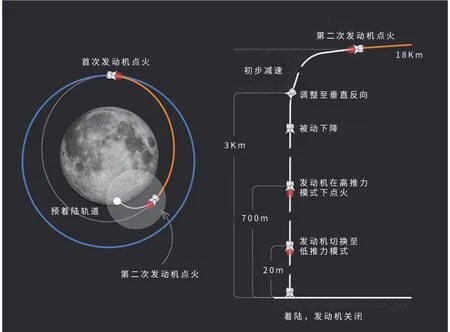
月球-25着陆轨道示意图
事故发生情况
月球-25前期任务顺利实施,于8月11日成功发射,8月16日进入月球环绕轨道,但在8月19日实施变轨机动过程中发生异常,最终坠毁在月球表面。
此次变轨前,月球-25处于91km×112km的轨道上,轨道倾角为82.087°。北京时间8月19日19:10,月球-25探测器开始进行轨道机动,计划进入18km×100km的“预着陆轨道”。但根据俄罗斯航天国家集团(ROSCOSMOS)的声明,此次变轨出现异常,探测器未按照设定的参数进行轨道机动。8月19日19:57前后,月球-25与地面失去联系,地面多次尝试与月球-25重新建立联系,均未成功。
俄罗斯初步分析显示,月球-25轨道机动的实际参数与设定参数存在偏差,原计划点火84s,实际点火127s,最终导致探测器坠毁在月球表面。俄罗斯成立了专门的跨部门调查小组,调查月球-25故障的原因及相关问题。俄罗斯科学院院士、RD-180火箭发动机设计师称,月球-25发生紧急情况可能是以下两种情景:一是程序故障,即变轨指令的错误;二是制动发动机出现技术故障。
4 事故影响与分析
俄印月球南极着陆竞争暂告一段落
由于俄罗斯与印度均计划在8月份着陆月球南极,外界将此认为是两国之间的月球南极着陆竞争。其中,印度探测器发射更早,计划在8月23日着陆;俄罗斯探测器发射较晚,但计划在8月21日着陆。在月球-25坠毁月球表面之后,月船-3仍然正常按照计划飞行。8月23日,印度月船-3成功着陆月球表面,印度成为继苏联、美国、中国之后第四个在月球着陆的国家,并且实现首次月球南极附近着陆。
俄罗斯航天及科技发展再受重创
苏联在无人月球探测方面曾经取得了令世人瞩目的成就,并一度领先于美国,实现了月球软着陆、月壤采样返回等多项“首次”,但继承了苏联航天工业体系的俄罗斯在航天方面发展缓慢。俄罗斯期望通过月球探测的实施提升和展示本国空间技术实力,重振俄罗斯的深空探测能力,新任务延续“月球”系列的编号,也表达了其期望延续“月球”系列辉煌成绩的愿景。月球-25的失败无疑将严重影响俄罗斯重振自身航天实力的愿景。此外,此次失败还将影响其后续探月任务以及国际合作。
俄罗斯在月球-25之后还规划了3次月球探测任务,其中月球-26为专门设计在极地轨道运行的月球轨道飞行器;月球-27包括一个增强型着陆平台,配备一个钻机结构,可以从大约1m的深度提取土壤样品;月球-28则计划从月球极地取回样品。预计这3项任务将受到失败的影响推迟发射时间,并且他国对俄罗斯航天能力的信心也将受到影响,这些将可能进一步影响到“国际月球科研站”的发展。
在俄乌冲突的特殊时期,成功实施月球-25任务还具有展示国家科技工业正常运转、宣示国家综合实力的重要作用。因此,除了航天方面的影响,任务失败对于俄罗斯科技工业以及国家实力方面也将造成沉重的打击。
俄罗斯初步考虑故障原因为低层次问题
从目前发布的信息看,导致月球-25坠毁月球的直接原因是机动未能按照设定参数执行。而执行机动改变轨道并不属于当前一项困难的技术,特别是俄罗斯在载人航天交会对接方面具有很强的技术能力。发生这样的事故显然不是技术不成熟造成的,大概率是低层次的质量管理问题。无论是控制指令错误或者发动机出现故障,都说明其质量控制存在很大的问题,同时风险分析和设计冗余不足,未能做足充分的测试。
5 结语
深空探测任务仍是当前最前沿的航天任务之一,具有很高的风险。尽管近年来随着技术的成熟和航天能力的提升,各国深空探测任务的成功率相对20世纪有了明显提升,但这些都建立在良好的航天技术基础和严格的质量要求之上。月球-25任务的失败再次表明了深空探测任务的高风险性,更反映出高可靠性的重要意义。
